Фиг.1
и 5 подводятся к сборочной позиции поворотом корпуса 3 относительно ос- нования 1, Для фиксирования объекта 30 силовыми элементами 4, 5 производится вюПочр.ние двигателей 10 и 21. Движение силового элемента 4 обеспечивается двумя двигателями через, дифференциальный механизм, выходной
упругого элемента 28 передается на силовые элементы 4 и 5 через зубчат передачу, колесо 20 которой жестко связана с ниг-г, а колесо 19 - с внеш ним центральным колесом 18 дифферен тдиального механизма. Для перемещени объекта 30 включается только .первый двигатель 10, а двигатель 21 не раб
вал (водило 17) которого кинематичес- 10 тает и тормоз 22 фиксирует его вал.
ки связан с этим силовым элементом цепной передачей 9 и передачей винт- гайка. После касания силовых элементов 4 и 5 с объектом 30 второй двигатель 21 закручивает упругий элемент 15 ния объекта 30 включается только 28,, а затем оба двигателя 1,0, 21 от-. второй двигатель 21, а двигатель 10
При этом движение передается на оба силовых элемента 4 и 5, а дифференциальный механизм работает как пла- нетарньш редуктор. Ддя расфиксирова
ключяются, объект 30 зажат. Усилие
не работает и тормоз 23 зажат. 2 ил
упругого элемента 28 передается на силовые элементы 4 и 5 через зубчатую передачу, колесо 20 которой жестко связана с ниг-г, а колесо 19 - с внешним центральным колесом 18 дифферен- тдиального механизма. Для перемещения объекта 30 включается только .первый двигатель 10, а двигатель 21 не работает и тормоз 22 фиксирует его вал.
ния объекта 30 включается только второй двигатель 21, а двигатель 10
При этом движение передается на оба силовых элемента 4 и 5, а дифференциальный механизм работает как пла- нетарньш редуктор. Ддя расфиксироване работает и тормоз 23 зажат. 2 ил.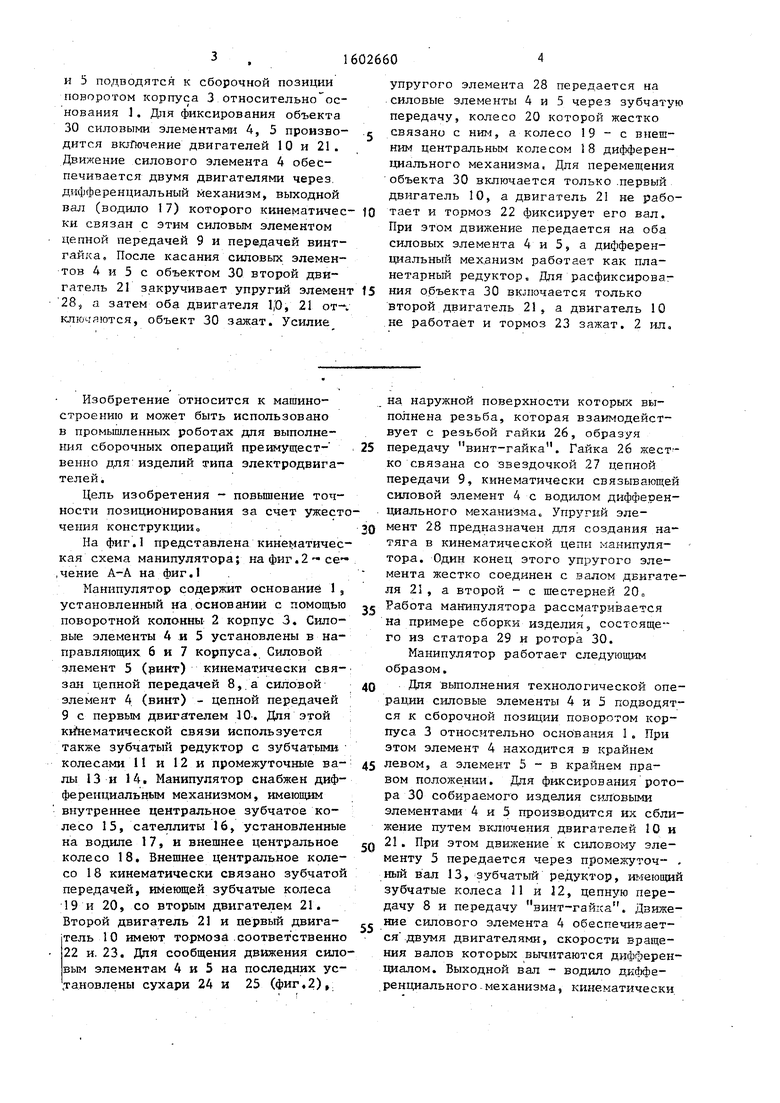

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальная корабельная пусковая установка вертикального пуска | 2021 |
|
RU2767097C1 |
| Установка для испытания моделей судовых устройств | 1974 |
|
SU518411A1 |
| Манипулятор | 1974 |
|
SU528193A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ПОДАЧИ БОРТОВЫХ КРЫЛЬЕВ | 1982 |
|
SU1069274A1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2010 |
|
RU2442715C1 |
| Устройство для привода цепной струговой установки | 1991 |
|
SU1811557A3 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах для выполнения сборочных операций. Цель изобретения - повышение точности позиционирования за счет ужесточения конструкции. Для выполнения технологической операции силовые элементы 4 и 5 подводятся к сборочной позиции поворотом корпуса 3 относительно основания 1. Для фиксирования объекта 30 силовыми элементами 4,5 производится включение двигателей 10 и 21. Движение силового элемента 4 обеспечивается двумя двигателями через дифференциальный механизм, выходной вал (водило 17) которого кинематически связан с этим силовым элементом цепной передачей 9 и передачей винт-гайка. После касания силовых элементов 4 и 5 с объектом 30 второй двигатель 21 закручивает упругий элемент 28, а затем оба двигателя 10,21 отключаются, объект 30 зажат. Усилие упругого элемента 28 передается на силовые элементы 4 и 5 через зубчатую передачу, колесо 20 которой жестко связана с ним, а колесо 19 - с внешним центральным колесом 18 дифференциального механизма. Для перемещения объекта 30 включается только первый двигатель 10, а двигатель 21 не работает и тормоз 22 фиксирует его вал. При этом движение передается на оба силовых элемента 4 и 5, а дифференциальный механизм работает как планетарный редуктор. Для расфиксирования объекта 30 включается только второй двигатель 21, а двигатель 10 не работает и тормоз 23 зажат. 2 ил.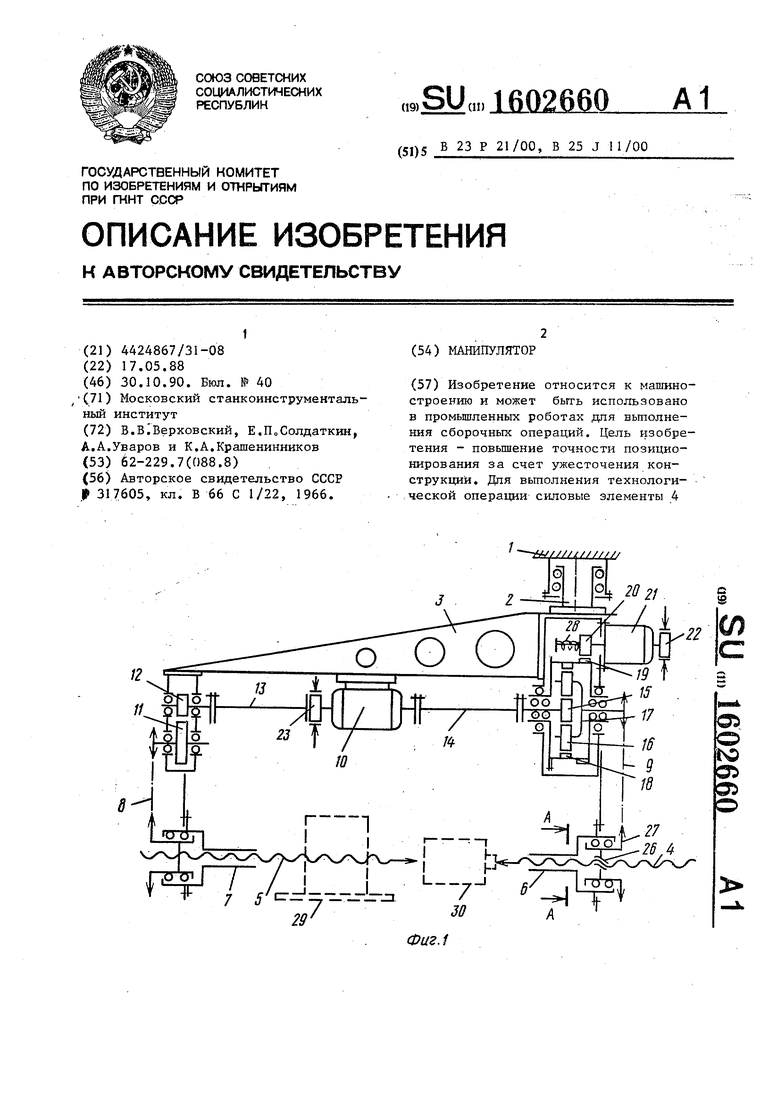
Изобретение относится к машиностроению и может быть использовано в промышленных роботах дпя выполнения сборочных операций преимущест- венно дд1я: изделий типа электродвигателей.
Цель изобретения - повышение точности позиционирования за счет ужесточения конструкциио
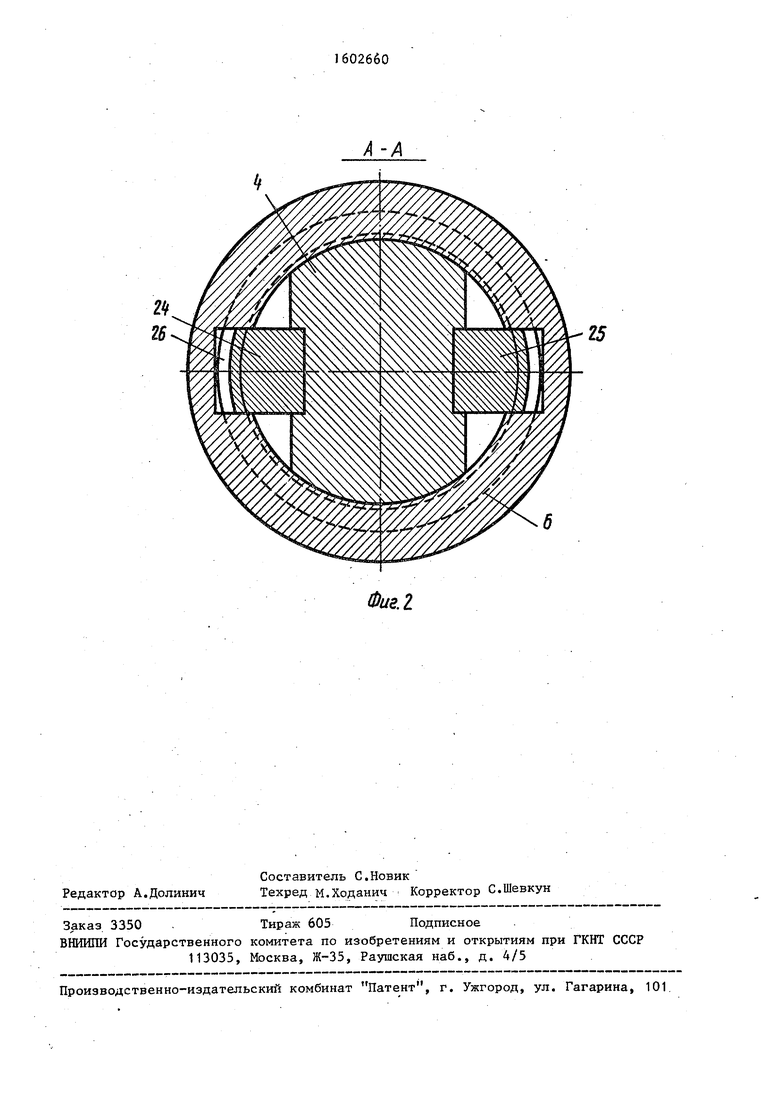
На фиг.1 представлена кинематическая схема манипулятора; на фиг.2 се чение А-А на фиг.1 .
Манипулятор содержит основание I, установленный на.оснований с помощью поворотной колонны 2 корпус 3. Силовые элементы 4 и 5 установлены в направляющих 6 и 7 корпуса. Силовой элемент 5 (ринт) кинематически связан цепной передачей 8, а силовой элемент 4 (винт) - цепной передачей 9 с первым двигателем JO-. Для этой ки нематической связи используется также зубчатый редуктор с зубчатыми колесами 1I и 12 и промежуточные валы 13 и 14, Манипулятор снабжен дифференциальным механизмом, имеющим внутреннее центральное зубчатое колесо 15, сателлиты 16, установленные на водила 17, и внешнее центральное колесо 18. Внешнее центральное колесо 18 кинематически связано зубчатой передачей, имеющей зубчатые колеса 19 и 20, со вторым двигателем 21. Второй двигатель 21 и первый двигатель 10 имеют тормоза .соответственно 22 и. 23. Для сообщения движения силовым элементам 4 и 5 на последних ус- .тановлены сухари 24 и 25 (фиг,2),
на, наружной поверхности которых выполнена резьба, которая взаимодействует с резьбой гайки 26, образуя
5 передачу винт-гайка. Гайка 26 ко связана со звездочкой 27 цепной передачи 9, кинематически связывающей силовой элемент 4 с водилом дифферен- . циального механизма. Упругий эле0 мент 28 предназначен для создания натяга в кинематической цепи манипулятора. Один конец этого упругого элемента жестко соединен с валом двигателя 21, а второй - с шестерней 20с
Работа манипулятора рассматривается на примере сборки изделия, состоящего из статора 29 и ротора 30.
Манипулятор работает следующим образом.
0 Для вьшолнения технологической операции силовые элементы 4 и 5 подводятся к сборочной позиции поворотом корпуса 3 относительно основания 1. При этом элемент 4 находится в крайнем
5 левом, а элемент 5 - в крайнем правом положении. Для фиксирования ротора 30 собираемого изделия силовыми элементами 4 и 5 производится их сближение путем включения двигателей 10 и 21. При этом движение к силовому элементу 5 передается через промежуточ- . ный вал 13, зубчатый редуктор, имеющий зубчатые колеса 11 и 12, цепную передачу 8 и передачу винт-гайка. Движение силового элемента 4 обеспечивается двумя двигателями, скорости вращения валов которых выч.нтаются дифференциалом. Выходной вал - водило диффе- ренциального . механизма, кинематически
0
5
че
связанный с элементом 4, вращается поэтому медленно и скорость перемещения силового элемента 4 ниже, элемента 5., После касания силовых элементов с объектом двигатель 21 продолжает работать в течение некоторого времени и закручивает упругий элемент 28, создавая натяг, необходимый для гарантированного удержания объекта. После этого оба двигателя отключаются - объект зажат. Для перемещения объекта-ротора 30 включается только двигатель 10. Так как двига- . тель 21 не работает, а его вал зафиксирован тормозом 22, дифференциальный механизм работает как планетарный редуктор с неподвижным внешним центральным зубчатым колесом. Оба силовых элемента перемещаются в одну сторону (в данном случае влево) и ротор 30 устанавливается внутрь статора 29. После окончания процесса сборки для -расфиксирования объекта включается только двигатель 21, а двигатель 10 не работает и. тормоз 23 зафиксирован. При этом дифферен- циапьный механизм работает как планетарный редуктор с неподвижным внут- ренни центральным зубчатым колесом. Вращение от двигателя 21 передается на водило и далее через цепную передачу 9 на силовой элемент 4, который перемещается вправо. После того как силовой элемент Л достигнет крайнего правого положения, двигатель отключается и поворотом корпуса, манипулятор отводится от сборочной позиции. Силовые элементы 4 и 5 выполняют роль двух рук манипулятора с разными режимами их работы.
ем
йия. -15
20
1602660(
Формула изобретения Манипулятор, содержащий основание, корпус с направляющими, силовые эле- менты, установленные в этих направ- ляющих, первый двигатель, жестко установленный на корпусе и кинематически связанный с первым силовым элементом посредством первой передачи винт- 0 гайка, а также второй двигатель и
вторую передачу винт-гайка, отличающийся тем, что, с целью повьшения точности позиционирования за счет ужесточения конструкции, он снабжен упругим элементом, зубчатой передачей и дифференциальным механизмом, имеющим внутреннее централь ное зубчатое колесо, кинематически связанное с первым двигателем, внешнее центральное зубчатое колесо, кинематически связанное с вторым двигателем, водило, сателлиты, установленные на водиле и образующие зацепление с каждым центральным зубчатым колесом, причем водило дифференциал, кого механизма кинематически связано с вторым силовым элементом посредством второй передачи винт-гайка, а второй двигатель кинематически связа- 30 с внешним центральным зубчатым колесом этого дифференциального мех аниз- ма посредством упругого элемента, один конец которого жестко соединен с валом второго двигателя, а второй конец - с дополнительно введенной зубчатой передачей, при этом колесо этой передачи жестко соединено с внешним центральным колесом дифференциального механизма, а корпус манипу- 40 лятора шарнирно установлен на основании.
25
35
Фиг. 2.
| ЗАХВАТ-МАНИПУЛЯТОР | 0 |
|
SU317605A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
