ГО
со
ел
позитно. Ковш и передняя челюсть соединены с рукоятью общим шарниром. Распределительное устройство выполнено из двух трехпозиционных гидрораспределителей (ГР) 13 и 14 и из общего ГР 12. Через ГР 13 и 14 гидронасос 10 соединен с соответствующими ГЦ 5 и 6. Выполнен ГР 12 с возможностью сообщения в одной его рабочей позиции гидронасоса 10 с порщневой полостью ГЦ 6, а в другой - с порщневой полостью ГЦ 5. При работе в режиме грейфера подача жидкости к ГЦ 5 про исходит по магистралям 18, 17 через ГР 13 и по магистралям 22, 20 либо по магистра- лям 21, 19. Цодача жидкости к ГЦ 6 происходит через ГР 14. При разработке грунта обратной лопатой управление осуществляется одним ГР 12, который обесп чивает синхронный поворот ковща и передней челюсти, сомкнутых между собой. 7 ил.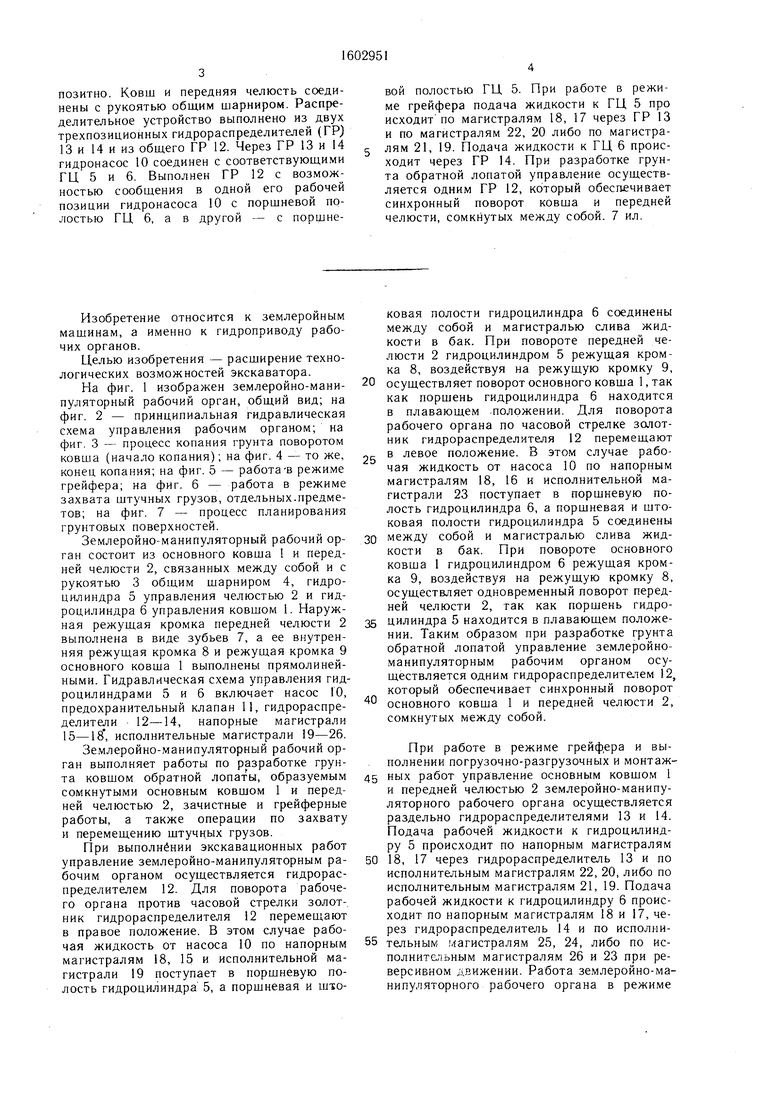
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование одноковшового гидравлического экскаватора | 1987 |
|
SU1521834A1 |
| Рабочее оборудование одноковшового экскаватора | 1989 |
|
SU1707141A1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1987 |
|
SU1507915A1 |
| Рабочее оборудование гидравлического экскаватора | 1988 |
|
SU1694788A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU787561A1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1661290A1 |
| Рабочее оборудование экскаватора | 1987 |
|
SU1472587A1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1714047A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР (ВАРИАНТЫ) | 2002 |
|
RU2211290C1 |
| Система управления рабочим процессом гидравлического экскаватора | 1985 |
|
SU1315572A1 |
Изобретение относится к землеройным машинам и позволяет расширить технологические возможности рабочего оборудования одноковшового экскаватора. Рабочее оборудование содержит рукоять, ковш, переднюю челюсть и гидропривод управления. Гидропривод имеет гидроцилиндр (ГЦ) 6 ковша, ГЦ 5 передней челюсти, гидронасос 10 и распределительное устройство. Установлены ГЦ 5 и 6 на рукояти оппозитно. Ковш и передняя челюсть соединены с рукоятью общим шарниром. Распределительное устройство выполнено из двух трехпозиционных гидрораспределителей (ГР) 13 и 14 и из общего ГР 12. Через ГР 13 и 14 гидронасос 10 соединен с соответствующими ГЦ 5 и 6. Выполнен ГР 12 с возможностью сообщения в одной его рабочей позиции гидронасоса 10 с поршневой полостью ГЦ 6, а в другой - с поршневой полостью ГЦ 5. При работе в режиме грейфера подача жидкости к ГЦ 5 происходит по магистралям 18, 17 через ГР 13 и по магистралям 22, 20 либо по магистралям 21, 19. Подача жидкости к ГЦ 6 происходит через ГР 14. При разработке грунта обратной лопатой управление осуществляется одним ГР 12, который обеспечивает синхронный поворот ковша и передней челюсти, сомкнутых между собой. 7 ил.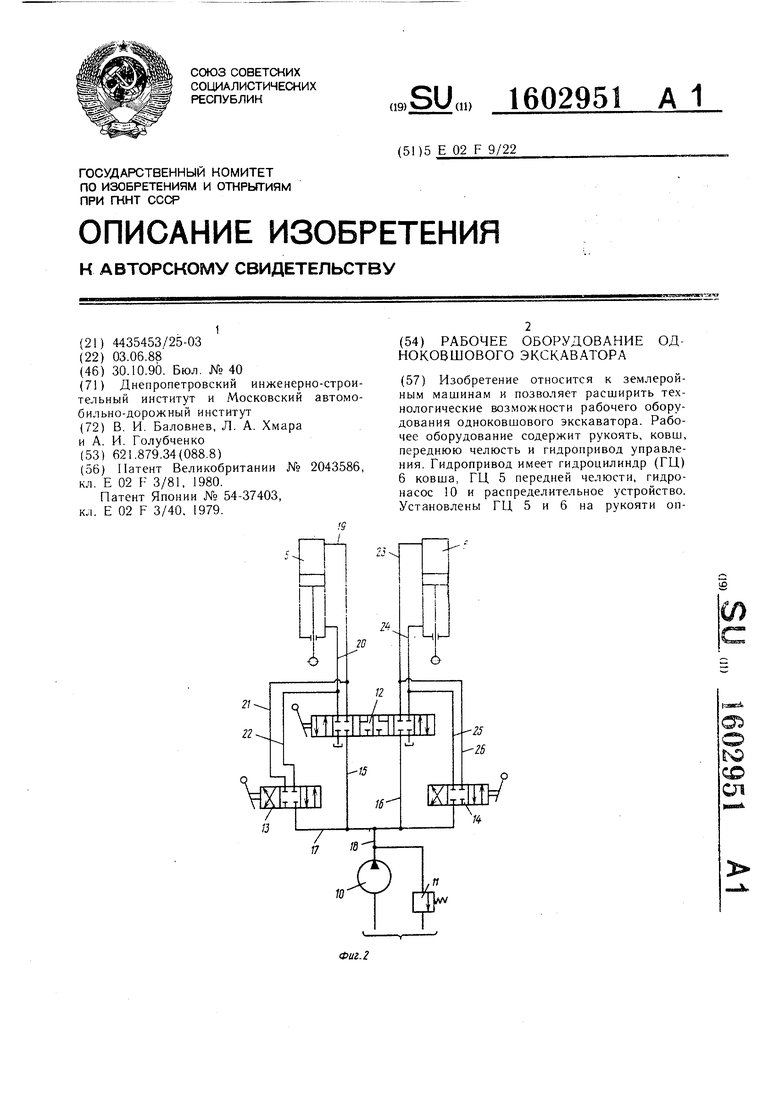
Изобретение относится к землеройным машинам, а именно к гидроприводу рабочих органов.
Целью изобретения - расширение технологических возможностей экскаватора.
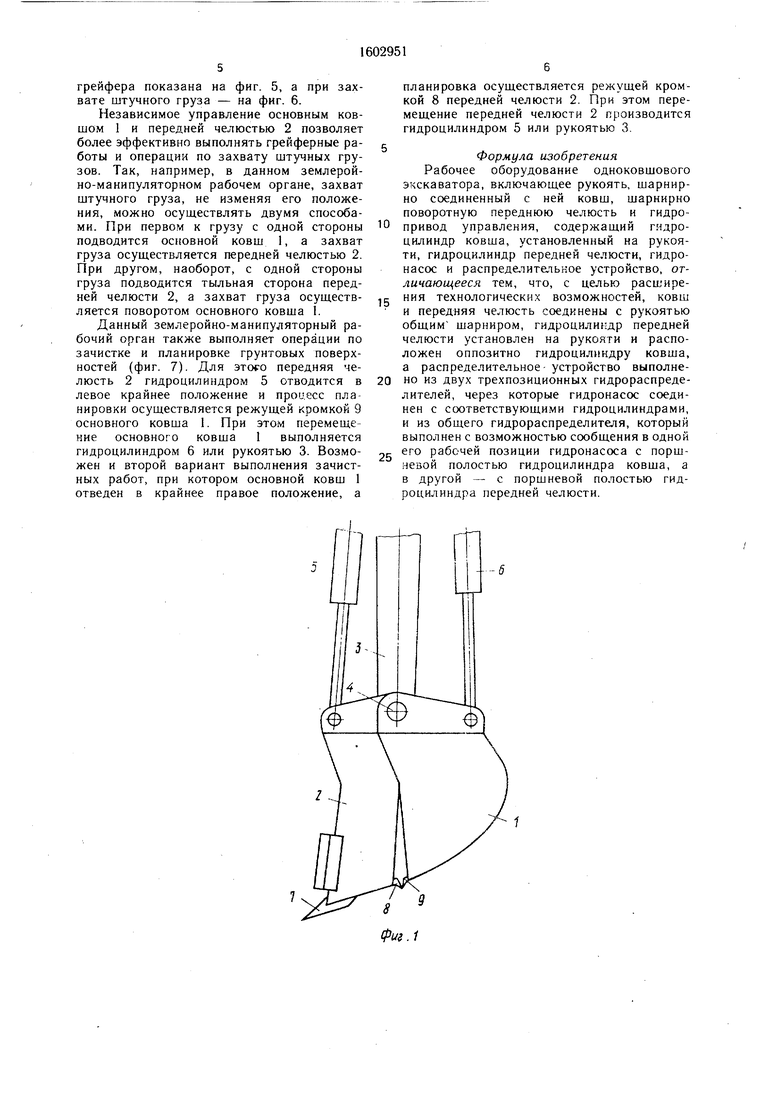
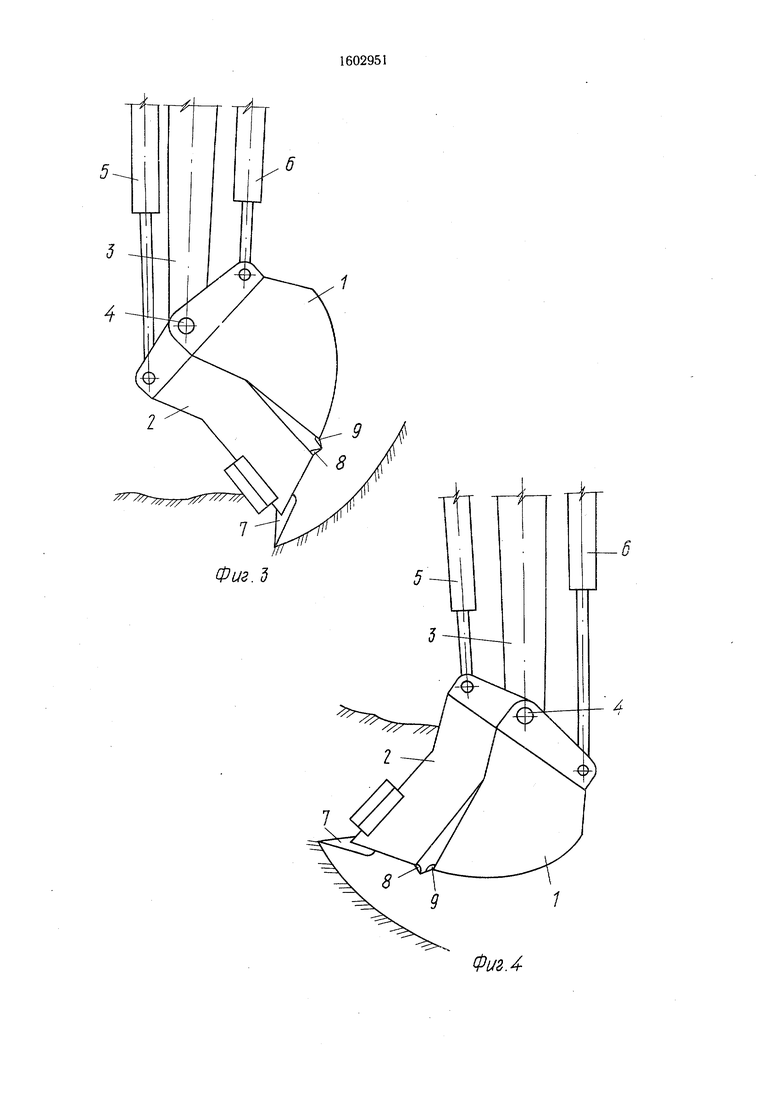
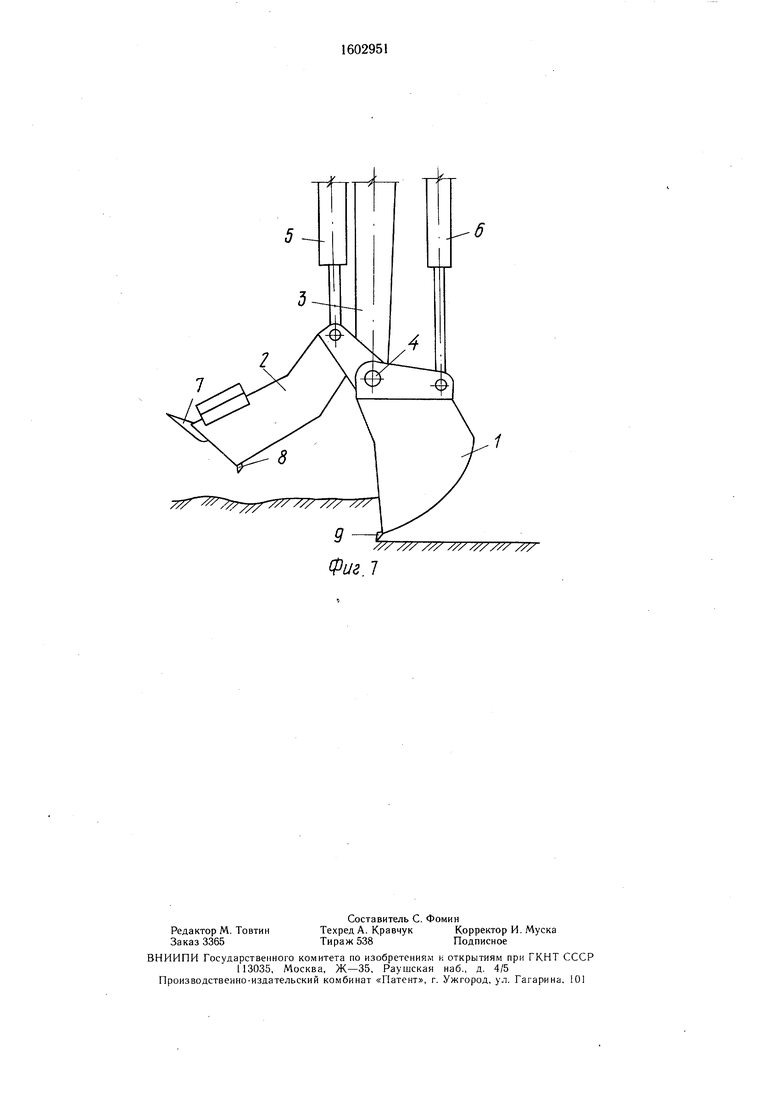
На фиг. 1 изображен землеройно-мани- пуляторный рабочий орган, общий вид; на фиг. 2 - принципиальная гидравлическая схема управления рабочим органом; на фиг. 3 - процесс копания грунта поворотом ковша (начало копания); на фиг. 4 - то же, конец копания; на фиг. 5 - работа-в режиме грейфера; на фиг. 6 - работа в режиме захвата штучных грузов, отдельных.предметов; на фиг. 7 - процесс планирования грунтовых поверхностей.
Землеройно-манипуляторный рабочий орган состоит из основного ковща 1 и передней челюсти 2, связанных между собой и с рукоятью 3 общим шарниром 4, гидроцилиндра 5 управления челюстью 2 и гидроцилиндра 6 управления ковшом 1. Наружная режущая кромка передней челюсти 2 выполнена в виде зубьев 7, а ее внутренняя режущая кромка 8 и режущая кромка 9 основного ковща 1 выполнены прямолинейными. Гидравлическая схема управления гидроцилиндрами 5 и 6 включает насос 10, предохранительный клапан 11, гидрораспределители 12-14, напорные магистрали 15-18, исполнительные магистрали 19-26.
Землеройно-манипуляторный рабочий орган выполняет работы по разработке грунта ковщом обратной лопаты, образуемым сомкнутыми основным ковщом 1 и передней челюстью 2, зачистные и грейферные работы, а также операции по захвату и перемещению штучных грузов.
При выполнении экскавационных работ управление землеройно-манипуляторным рабочим органом осуществляется гидрораспределителем 12. Для поворота рабочего органа против часовой стрелки золот-, ник гидрораспределителя 12 перемещают в правое положение. В этом случае рабочая жидкость от насоса 10 по напорным магистралям 18, 15 и исполнительной магистрали 19 поступает в поршневую полость гидроцилиндра 5, а поршневая и щтоковая полости гидроцилиндра 6 соединены между собой и магистралью слива жидкости в бак. При повороте передней челюсти 2 гидроцилиндром 5 режущая кромка 8, воздействуя на режущую кромку 9,
0 осуществляет поворот основного ковща 1,так как порщень гидроцилиндра 6 находится в плавающем .положении. Для поворота рабочего органа по часовой стрелке золотник гидрораспределителя 12 перемещают в левое положение. В этом случае рабочая жидкость от насоса 10 по напорным магистралям 18, 16 и исполнительной магистрали 23 поступает в поршневую полость гидроцилиндра 6, а порщневая и щто- ковая полости гидроцилиндра 5 соединены
0 между собой и магистралью слива жидкости в бак. При повороте основного ковща 1 гидроцилиндром 6 режущая кромка 9, воздействуя на режущую кромку 8, осуществляет одновременный поворот передней челюсти 2, так как порщень гидро5 цилиндра 5 находится в плавающем положении. Таким образом при разработке грунта обратной лопатой управление землеройно- манипуляторным рабочим органом осуществляется одним гидрораспределитечем 2, который обеспечивает синхронный поворот основного ковша 1 и передней челюсти 2, сомкнутых между собой.
0
При работе в режиме грейфера и выполнении погрузочно-разгрузочных и монтажных работ управление основным ковшом 1 и передней челюстью 2 землеройно-манипу- ляторного рабочего органа осуществляется раздельно гидрораспределителями 13 и 14. Подача рабочей жидкости к гидроцилиндру 5 происходит по напорным магистралям
18, 17 через гидрораспределитель 13 и по исполнительным магистралям 22, 20, либо по исполнительным магистралям 21, 19. Подача рабочей жидкости к гидроцилиндру 6 происходит по напорным магистралям 18 и 17, через гидрораспределитель 14 и по исполниельным магистралям 25, 24, либо по ис- полните/чьным магистралям 26 и 23 при реверсивном движении. Работа землеройно-ма- нипуляторного рабочего органа в режиме
грейфера показана на фиг. 5, а при захвате штучного груза - на фиг. 6.
Независимое управление основным ковшом 1 и передней челюстью 2 позволяет более эффективно выполнять грейферные работы и операции по захвату штучных грузов. Так, например, в данном землерой- но-манипуляторном рабочем органе, захват штучного груза, не изменяя его положения, можно осуществлять двумя способами. При первом к грузу с одной стороны подводится основной ковш 1, а захват груза осуществляется передней челюстью 2. При другом, наоборот, с одной стороны груза подводится тыльная сторона передней челюсти 2, а захват груза осуществляется поворотом основного ковща 1.
Данный землеройно-манипуляторный рабочий орган также выполняет операции по зачистке и планировке грунтовых поверхностей (фиг. 7). Для этого передняя челюсть 2 гидроцилиндром 5 отводится в левое крайнее положение и процесс планировки осуществляется режущей кромкой 9 основного ковша 1. При этом перемеще ние основного ковша 1 выполняется гидроцилиндром 6 или рукоятью 3. Возможен и второй вариант выполнения зачист- ных работ, при котором основной ковш 1 отведен в крайнее правое положение, а
0
планировка осуществляется режущей кромкой 8 передней челюсти 2. При этом перемещение передней челюсти 2 производится гидроцилиндром 5 или рукоятью 3.
Формула изобретения Рабочее оборудование одноковщового экскаватора, включающее рукоять, шарнир- но соединенный с ней ковш, щарнирно поворотную переднюю челюсть и гидропривод управления, содержащий гндро- цилиндр ковша, установленный на рукояти, гидроцилиндр передней челюсти, гидронасос и распределитатькое устройство, отличающееся тем, что, с целью расширения технологических возможностей, ковш и передняя челюсть соединены с рукоятью общим шарниром, гидроцилиндр передней челюсти установлен на рукояти и расположен оппозитно гидроцилиндру KOBUja, а распределительное- устройство выполне0 но из двух трехпозиционных гидрораспределителей, через которые гидронасос соединен с соответствующи.ми гидроцилиндрами, и из общего гидрораспределителя, который выполнен с возможностью сообщения в одной
g его рабочей позиции гидронасоса с поршневой полостью гидроцилиндра ковша, а в другой - с поршневой полостью гидроцилиндра передней челюсти.
5
---б
Л
Фиг.4
Фиг-5
фиг.б
/x /// //
9
Фиг.1
/// //7 /// /77/y/ ///
| УСТАНОВКА ДЛЯ ВЫСОКОЧАСТОТНОЙ ОБРАБОТКИ ДИЭЛЕКТРИЧЕСКИХ МАТЕРИАЛОВ | 1992 |
|
RU2043586C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
