кинематически связанные через стопоры 10 и 12 с соответствующими ис пол- нительными механизмами И и 13, В поршневых полостях ГЦ 5 и 6 установлены соответственно датчики 18 и 21 давления, которые через усилители 19 и 22 подключены к входам блоков 20 и 23 сравнения. Выходы блоков 20 и 23 соединены с входами блоков 26 и 27 задания разности давлений в ГЦ 5 и 6 и с входами сумматоров 24 и 25. Выходы блоков 26 и 27 подключены к соответствующим регулируемым дросселям 17 и 15. Для регистрации процесса вьщвижения штоков ГЦ 5 и 6 предусмот1
Изобретение относится к землерой - ным и землеройно-транспортным машинам с гидроприводом, в частности экскаваторам.
Целью изобретения является повыше- ние производительности экскаватора путем автоматической оптимизации режима работы экскаватора.
На фиг,1 приведена функциональная схема предлагаемой системы; на фиг.2 - выполнение блоков сравнения, задания разности и сумматора.
Система управления рабочим процессом гидравлического экскаватора состоит из гидравлических насосов 1 и 2 подключенных к основной системе питания. Насос 1 с помощью магистралей 3 и 4 и независимых гидрораспределителей (не показаны) подключен к гидроцилиндрам рукояти 5 и ковша 6 соот- ветственно. Гидронасос-2 посредством трубопровода 7 подключен к гидромоторам поворота хода и гидроцилиндру стрелы (не показаны). Гидроцилиндры рукояти 5 и ковша 6 соединены с вторым насосом 2 посредством дополнительных гидрораспределителей 8 и 9, соответственно. Управляющий элемент,
например, шток гидрораспределителя 8
кинематически соединен со стопором 10, внутри которого установлено реле времени (не показано), и первым исполнительным механизмом 11, а управляющий элемент гидрораспределителя 9
рены расходомеры 28 и 29 одностороннего действия. Они регистрируют только процесс копания грунта и соединены с вторыми входами сз мматоров 24 и 25, выходы которых подключены к исполнительным механизмам 13 и 11 соответственно. Система обеспечивает автоматическое совмещение операций копания ковщом и рукоятью при одновременном повышении скорости разработки грунта. При этом перераспределение нагрузок на элементы оборудования осуществляется в зависимости от условий эксплуатации и грунтовых условий. 2 з,п. ф-лы, 2 ил.
5 О
п 5
кинематически соединен со стопором 12 и вторым исшэлнит.ельным механизмом 13. Гидроцилиндр 5 рукояти подключен к гидрораспределителю 8 посредством магистралей 14.
Гидрораспределители 8 и 9 гидравлически соединены между собой и посредством их гидроцилиндры рукояти 5 и коБща 6 соединены с вторым насосом 2, Регулируемый дроссель 15 установлен в .одной из магистралей 14, соединяющей поршневую полость гидроцилиндра 5 рукояти с насосом 2. Гидроцилиндр 6 ковша подключен к гидрораспределителю 9 с помощью магистралей 16, Регулируемый дроссель 17 установлен в одной из магистралей 16, соединяющей поршневую полость гидроцилиндра 6 ковша с насосом 2.
В поршневой полости гидроцилиндра 5 установлен датчик 18 давления, подключенный к усилителю 19, выход которого соединен с блоком 20 сравнения заданных величин максимального Р„с(кс и минимального Р, давлений с действительным Рр давлением в поршневой полости гидроцилиндра 5. Аналогично в поршневой полости гидроцилиндра 6 установлен датчик 21, подключенный к усилителю 22, выход которого соединен с аналогичным блоком 23 сравнения заданных величин максимального РМЙКС минимального Рд давлений с действительным Р« давлением в поршне3131
ой полости гидроцилиндра 6 ковша. В вою очередь, вторые выходы блоков 0 и 23 соединены с первыми входами умматоров 24 и 25. Первые выходы локов 20 и 23 соединены с входами локов 26 и 27 задания разности давений в гидроцилиндрах 5 и 6.
Блоки 26 и 27 выполнены в виде операционных усилителей с обратной связью (фиг.2). Выход блока 26 подключен к регулируемому дросселю 17, а выход блока 27 - к дросселю 15. Для регистрации процесса выдвижения штоков гидроцилиндров 5 и 6 в системе предусмотрены расходомеры 28 и 29 одностороннего действия, которые размещены в магистралях, соединяюпщх штоковые полости гидроцилиндров 5 и 6 с первым насосом 1. Расходомеры 28 и 29 регистрируют только процесс выдвижения штоков, т.е. процесс копания грунта и соединены с вторыми входами сумматоров 24 и 25, выход сумматора 24 соединен с вторым исполнительным механизмом 13, а выход сумматора 25 - с первым исполнительным механизмом 11. Третьи выходы блоков 20 и 23 соединены соответственно со стопорами 10 и 12.
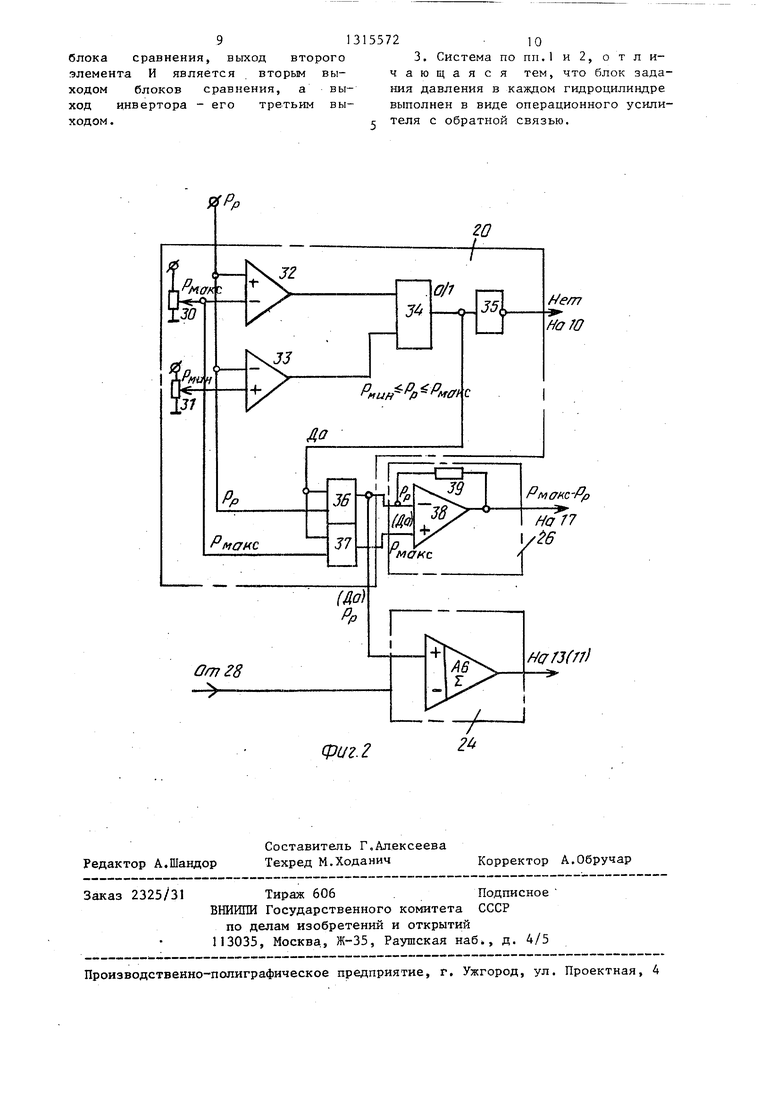
Каждый из блоков 20 и 23 сравнения выполнен в виде задатчиков максимального 30 и минимального 31 давлений в гидроцилиндрах 5 и 6, компараторов 32 и 33, первого элемента И 34, инвертора 35, второго элемента И 36 и третьего элемента И 37. Выходы компараторов 32 и 33 соединены с входами элемента И 34, выход которого со- едине с входом инвертора 35 и пер- вьми входами элементов И 36 и 37. Первый вход компаратора 32 соединен с задатчиком 30 и вторым входом элемента И 37. Первый вход компаратора 33 соединен с задатчиком 31. Вторые входы компараторов 32 и 33 и элемента К 36 являются входами блоков 20 и 23. Выходы элементов И 36 и 37 являются первыми выходами блоков 20 и 23. Выход элемента И 36 является вторым выходом блока 20(23), а выход инвертора - третьим выходом блока 20(23). Блоки 26 и 27 выполнены в виде операционного усилителя 38 с обратной связью 39.
Устройство работает следующим образом.
При копании рукоятью (не показана) под действием насоса 1 и гидроцилинд24
ра 5 жидкость по основной магистрали 3 подается под давлением в поршневую полость данного гидроцилиндра, которое регистрируется датчиком 18 давления. Сигнал от датчика 18 давления поступает через усилитель 19 на блок 20 сравнения. Если величина давления поступающей жидкости Рр не превышает
максимального давления Р.,
(устанавливается настройкой предохранительных клапанов), но больше, чем минимальное давление Р,ц , обуславливаемое свободным ходом штока, плюс некоторая величина поправки на внедрение в грунт на начальной стадии, то сигнал подается на выход Да блока 20 сравнения, электрически связанного с блоком 26 давления разности давления. Данная ситуация возникает при стационарном режиме рабо- ты гидроцилиндра 5 рукояти, когда имеется определенный избыток мош;нос- ти, не реализованной полностью на процесс разработки грунта.
Разность давлений определяется зависимостью. дРр Рд,о(кс Рр и преобразуется электрическим сигналом соответствующей силы, который поступает на управляюш 1й элемент дросселя 17. Проходное сечение дросселя 17 в этом случае соответствует величине разности ЛРр значений максимального действительного Рр давлений
в поршневой полости гидроцилиндра 5 рукояти. Чем больше данная разность, тем больше открывается проходное сечение дросселя 17. При лРр О проходное сечение дросселя полностью
закрыто. Одновременно с второго выхода блока 20 подается электрический сигнал на сумматор 24, которьш воздействует на исполнительный механизм 13, перемещающий шток гидрораспределителя 9 из нейтрального положения в положение подачи жидкости в поршневую полость гидроцилиндра 6 ковша.
Однако сумматор срабатывает только в том случае, если на него поступает еще и сигнал от расходомера 28, указывающего на наличие или отсутствие перемещения штока гидроцилиндра 5 рукояти. Если же давления штока нет, то соответственно нет копания
грунта поворотом рукояти и сигнал от расходомера 28 на сумматор 24 не поступает. При наличии обоих указанных сигналов исполнительный механизм 13 беспрепятственно перемещает шток гид51
рораспределителя 9 и жидкость от насоса 2 подается в поршневую полость гидроцилиндра 6 ковша. Причем-расход ее регулируется указанным дросселем 17. В результате в гидродилиндре б ковша возникает вторичное давление, вызванное движением рукояти, которое регистрируется датчиком 21 давления и обуславливает поворот ковша.
От Датчика 21 сигнал поступает че рез усилитель 22 в блок 23 сравнения Если величина давления поступающей жидкости Р не превышает, предельного РМСТКС заданного настройкой предохранительных клапанов, и больше величины Р,„ в ковше, то через блок 27 задания разности давленийсигнал о величине дРц поступает к дросселю 15, который регулирует подачу рабочей жидкости в поршневую полость гидроцилиндра 5 рукояти через магистраль 14 от второго насоса 2. Дополнительный подвод жидкости в гидроди- линдр 5 рукояти зависит, таким образом, от релсима работы самой рукояти при ее движении под действием насоса 1. На вход блока 20(23) подаются в виде величин напряжений значения ,, - (30), Р,„ - (31) и Рр (РК) из датчика 18 и усилителя 19 (21 и 22)
На выходе из блока 20(231 имеется выходной сигнал Да, разрешающий дальнейшую передачу аналоговых сигналов в блоки 24 и 26, и выходной сигнал Нет. В случае, если вьтолняет- ся условие P,j,H Рр , на выход элемента 34 - цифровой код 1 - сигнал Нет отсутствует, а разрешаюш51й цифровой код 1 подается на элементы И 36 и 37. Только в этом случае идет разветвление сигналов на блоки 24 и 26. При этом в блоке 20(23) имеется два вывода с разрешающего сигнала первый Р - на сумматор 24; второй Рр и Р„д,с подаются на блок 26, выполняющий вычитание мамс Рр) Величина электрического сигнала, соответствующая разности РМ«К.С Рр) S поступает на исполни- . тельный элемент (например, электромагнит) дросселя 17(15). Блок 26(27) вьтолняется из операционного усилителя 38 с системой обратной связи 39.
В качестве исполнительного механизма 11(13) может служить электромагнит, выполнение которым своих функций возможно только при поступлении на него соответствующего сигнала
155726
из блока 20(23). Подача жидкости от насоса 2 в поршневую полость гидроцилиндра 5 осуществляется только в том случае, если со второго выхода
. блока 20(23) поступит сигнал на сумматор 24(25), от которого поступает соответствующий сигнал на исполнительный механизм 1 1 , воздействуюш {й на шток гидрораспределителя 8. От
10 расходомера 29, сигнализирующего о движении штока гидроцилиндра 6 ковша, сигнал поступает на сумматор 25. В этом случае, шток гидрораспределителя 8 перемещается в положение пода15 чи жидкости от насоса 2 в поршневую полость гидроциливдра 5.
Таким образом происходит одновременное движение ковша и рукояти, гидравлические характеристики которых
20 влияют друг на друга посредством системы .обратной и прямой связи. Интервал включения стопора, а также интервал разности давлений в полостях могут быть заданы в зависимости от чальных условий работы. Если давление превьш1ает предельное в полости гидроцилидра 5 или 6 или давле :ние в этих полостях ниже минимального, что говорит об отсутствии зна30 чительных сопротивлений на рабочих органах, то с третьих выходов блоков 20 и 23 сравнения подаются сигналы на стопоры 10 и 12, соответственно. Стопоры 10 и 12с реле времени про35 пускают сигнал от исполнительных механизмов II и 13, перемещают штоки гидрораспределителей 8 и 9 в нейтральное положение и прекращают подачу жидкости от насоса 2 в магистрали
40 14 и 16.
При отсутствии каких-либо сигналов, поступающих на гидрораспределители 8 и 9, они устанавливаются в
нейтральное положение под действием возвратных пружин, а жидкость в магистрали 16 и 14 от насоса не поступает. Т.е. гидрораспределители 8 и 9 нормально закрыты.
Q Если при работе в автоматическом режиме ковш полностью набран грунтом и повернут на максимальный угол, то давление превышает максимальное, срабатывают стопоры 10 и 12, гидро i; распределителя 8 и 9 устанавливаются в нейтральное .ение и система отключается. Оборудование готово на выгрузку грунта в транспортное средство.
71
Предлагаемая система позволяет автоматически совмещать операции поворота и движения ковша, что позво - ляет существенно повысить скорость движения режущей кромки при копании или рыхлении грунта, при наибольщей эффективности использования мощност- ных возможностей машины. При движении одного из рабочих органов дальнейшее увеличение его скорости может быть невозможно по ряду конструктивных причин. Однако избыток мощности может быть реализован другим путем, а именно подводом дополнительной жидкости к другому рабочему органу, тем самым увеличивая суммарную скорость движения режущей кромки. Соотнощение скоростей поворота рабочих органов обуславливается прежде всего влиянием внешних условий на регулируемые дроссели.
Двухпоточная система обратной связи характеризуется взаимным влиянием нагрузок и режимов давления ковша и рукояти.
Поддержание определенного режима давления в каждом из рабочих органов и перераспределение нагрузок в зависимости от внешних условий обеспечивают наилучшее использование полезной мощности при максимально возможной скорости движения режущей кромки
Формула изобретения
1 . Система управления рабочим процессом гидравлического экскаватора, содержащая основную гидросистему с двумя гидравлическими насосами, первый из которых посредством независимых гидрораспределителей подключен к падроцилиндрам рзпсояти и ковща, а второй соединен с гидромоторами хода поворота поворотной платформы и гидроцилиндрами стрелы с возможностью подключения к гидроцилиндрам рукояти и ковша, отличающаяся тем, что, с целью повьшения производительности экскаватора путем автоматической оптимизации режима работы экскаватора, она снабжена датчиками давления, усилителями, блоками сравнения заданных величин максимального и минимального давлений с действительным давлением в каждом гидроцилиндре, блоками задания разности давлений в каждом гидроцилиндре, сумматорами, гидравлически соединенными
55728
между собой дополнительными гидрораспределителями, посредством которых гидроцилиндры рукояти и ковша соединены с вторым насосом, исполнитель- г ными механизмами и стопорами с реле времени, кинематически соединенными друг с другом и с управляющими элементами дополнительных гидрораспределителей, а также система снабжена
O дросселями и расходомерами одностороннего действия, при зтом датчики давления размещены в поршневой полости каждого гидроцилиндра и подключены к усилителям, выходы которых сое5 динены с входами блоков сравнения, первые выходы которых соединены с входами блоков задания разности давлений в каждом гидроцилиндре, вто- рые выходы - с п ервыми входами сумма0 торов, третьи - со стопорами, а дроссели установлены в магистралях, соединяющих поршневые полости гидроцилиндров рукояти и ковша с вторым насосом, и подключены соответственно:
5 первый - к выходу блока задания разности давления в гидроцилиндре ковша, второй - к выходу блока задания разности давлений в гидроцилиндре рукояти, расходомеры одностороннего дейст0 ВИЯ размещены в магистралях, соединяющих штоковые полости гидроцилиндров рукояти и ковша с первым насосом и подключены к вторым входам сумматоров , причем выходы первого и второго
5 сумматоров соединены соответственно с исполнительными механизмами второго и первого дополнительных гидрораспределителей.
2. Система по п.1, отличаю0 Щ а. я с я тем, что блок сравнения выполнен в виде задатчиков максимального и минимального давлений в гидроцилиндрах рукояти и ковша, двух компараторов, трех элементов И и ин5 вертора, при этом выходы компараторов соединены с входами первого элемента И, выход которого соединен с первыми входами второго и третьего элементов И и с входом инвертора, а
0 первый вход первого компаратора подключен к задатчику максимального давления и второму входу третьего элемента И, первый вход второго компаратора подключен к задатчику минималь5 ного давления, причем вторые входы компараторов и второй вход второго элемента И являются входом блока сравнения, выходы второго и третьего элементов И являются первым выходом
блока сравнения, выход второго элемента И является вторым выходом блоков сравнения, а выход инвертора - его третьим выходом .
3. Система по пп.1 и 2, о т л и- чающаяся тем, что блок задания давления в каждом гидроцилиндре вылолнен в виде операционного усили- теля с обратной связью.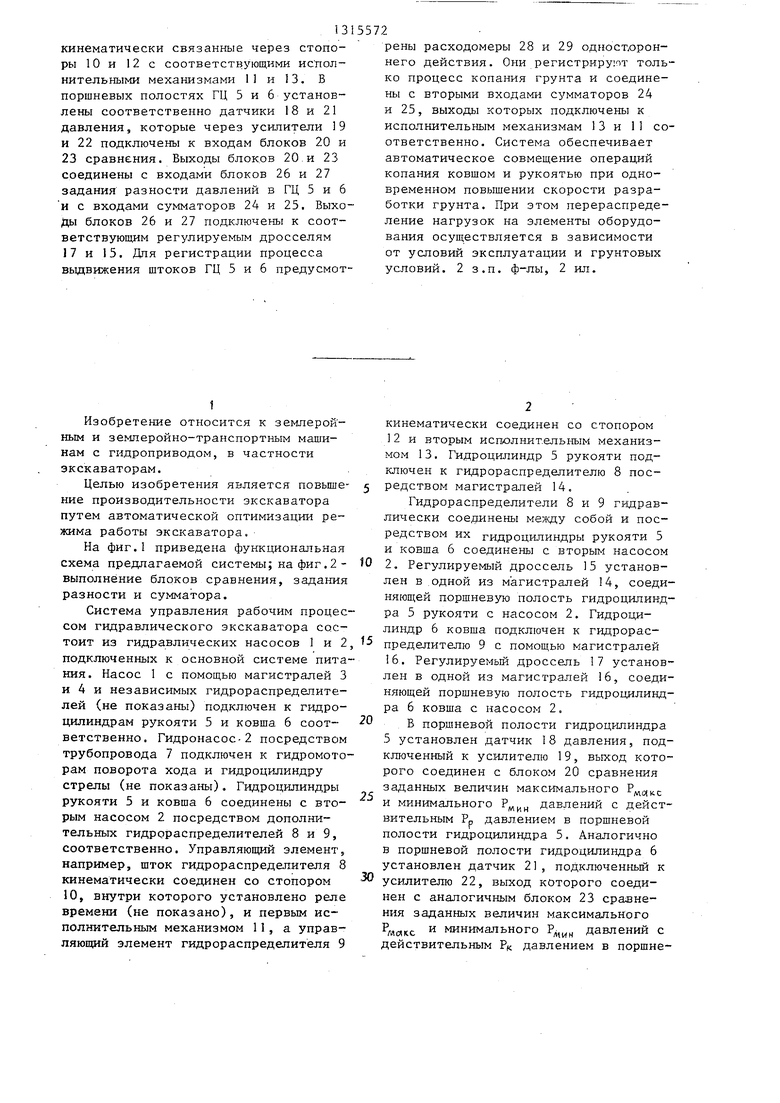

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Гидравлический экскаватор для образования траншей под защитой тиксотропного раствора | 1987 |
|
SU1461842A1 |
| Одноковшовый экскаватор | 1989 |
|
SU1714048A1 |
| Гидравлический экскаватор для образования траншей под защитой тиксотропного раствора | 1987 |
|
SU1461841A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| Гидропривод управления рабочим оборудованием гидравлического экскаватора | 1988 |
|
SU1546574A1 |
| Гидропривод одноковшового экскаватора | 1986 |
|
SU1308722A1 |
Изобретение относится к области землеройно-транспортной техники и позволяет повысить производительность экскаватора путем автоматической оптимизации режима работы экскаватора. Система содержит гидроцилиндры (ГЦ) 5 и 6 рукояти и ковша, насосы 1 и 2 и гидрораспределители 8 и 9, сл с оо СП СП tc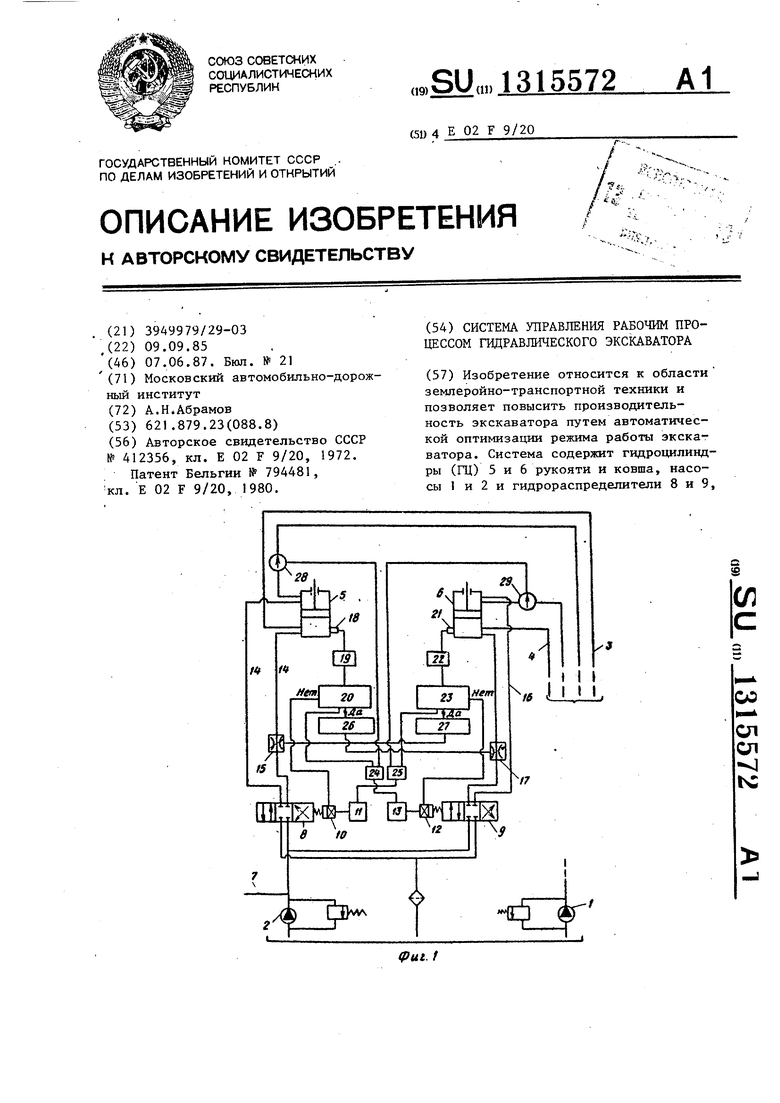
.30
0/1
35
Нет
How
J3
31
фиг. 2
Рмокс-f p
Н(7ГЗ(Г7) -
Редактор А.Шандор
Составитель Г.Алексеева Техред М.Ходанич
Заказ 2325/31 Тираж 606 . Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва., Ж-35, Раушская наб, д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор А.Обручар
| 1972 |
|
SU412356A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , Патент Бельгии № 794481, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
