Изобретение относится к системам управления летательных аппаратов, в частности к электрогидравлическим системам торможения колес.
Целью изобретения является повышение надежности управления торможением колес.
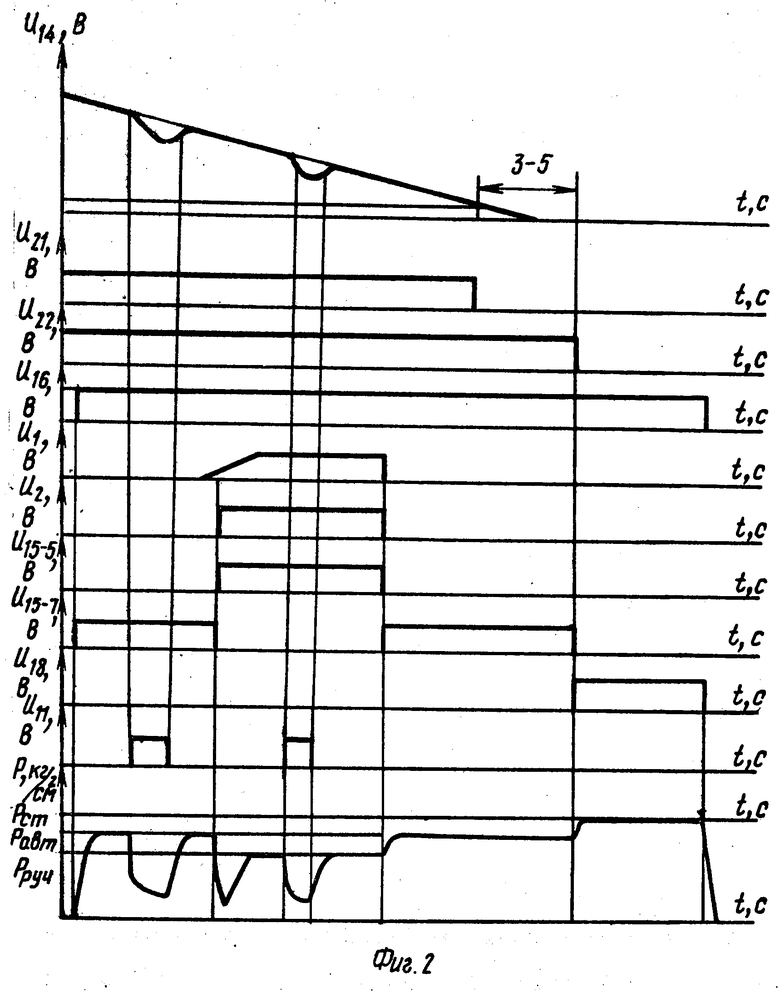
На фиг.1 изображена функциональная схема устройства для управления торможением колес самолета; на фиг.2 - циклограммы изменения функциональных сигналов устройства.
Устройство cодержит электромеханический задатчик 1 управляющего сигнала с концевым выключателем 2, задатчики 3 и 4 опорного напряжения, ключи 6 и 7, блок 8 выбора максимального сигнала, суммирующий усилитель 9, датчик 10 давления и тормозе, антиюзовый автомат 11, электрогидравлический преобразователь 12, тормозной механизм 13, датчик 14 угловой скорости колеса, коммутатор 15, задатчик 16 режима торможения, первый и второй логический элементы И 17 и 18, логический элемент НЕ 19, формирователь 20 свободной скорости, компаратор 21, блок 22 задержки и задатчик 23 порогового напряжения.
Устройство работает следующим образом.
В исходном состоянии задатчики 3 и 4 опорного напряжения выдают сигналы постоянного уровня, цепи ключей 5, 6 и 7 разомкнуты, давление в тормозном механизме 13 отсутствует, датчик 14 угловой скорости колеса выдает сигнал, пропорциональный угловой скорости колеса.
При работе в ручном режиме пилот воздействует на задатчик 1 управляющего сигнала путем нажатия на тормозную педаль или гашетку. В начале хода педали (или гашетки) срабатывает концевой выключатель 2 и выдает сигнал U2 через коммутатор 15 на управляющий вход ключа 5 (сигнал U15-5). Одновременно коммутатор 15 исключает подачу сигнала на управляющий вход ключа 7. Ключ 5 срабатывает и подключает задатчик 1 управляющего сигнала, выходной сигнал U1 которого пропорционален ходу тормозной педали, через блок 8 выбора максимального сигнала к прямому входу суммирующего усилителя 9. Усиленный сигнал поступает на управляющий вход электрогидравлического преобразователя 12, вследствие чего начинает возрастать давление Рт в тормозном механизме 13. При этом датчик 10 давления в тормозе выдает на инверсный вход суммирующего усилителя 9 сигнал, пропорциональный величине тормозного давления и приводящий к соответствующему уменьшению сигнала на выходе усилителя 9. В момент, когда сигнал на выходе суммирующего усилителя 9 станет равным нулю, электрогидравлический преобразователь 12 прекращает подачу рабочей жидкости и в тормозном механизме 13 устанавливается давление Рруч, соответствующее уровню сигнала U1 от задатчика 1 управляющего сигнала.
Если в процессе торможения тормозной момент колеса превышает допустимый по условиям сцепления пневматики с дорожным покрытием, резко возрастает замедление и проскальзывание колеса привода к соответствующему изменению сигнала датчика 14 угловой скорости колеса, вследствие чего срабатывает антиюзовый автомат 11 и выдает сигнал U11 на второй инверсный вход суммирующего усилителя 9. При этом тормозное давление сбрасывается. После раскрутки колеса сигнал с выхода антиюзового автомата 11 снимается и давление вновь поступает в тормозной механизм 13.
Для выполнения режимов автоматического торможения при пробеге самолета после посадки или стартового торможения перед взлетом пилот подает сигнал U16 от задатчика 16 режима торможения, который поступает на входы элементов И 17 и 18.
Если переключение произошло на пробеге, с выхода датчика 14 угловой скорости колеса поступает сигнал, пропорциональный угловой скорости колеса на вход формирователя 20 свободной скорости. Если сигнал с выхода формирователя 20 свободной скорости, пропорциональный свободной скорости колеса, больше заданного уровня ( ≈10 км/ч), срабатывает компаратор 21 и на его выходе появляется сигнал U21, который через блок 22 задержки подается на второй вход элемента И 17 (U22). На выходе последнего появляется сигнал, поступающий на коммутатор 15, который выдает сигнал U15-7 на управляющий вход ключа 7 при условии отсутствия сигнала U2 от концевого выключателя 2. Ключ 7 закрывается, а задатчик 3 опорного напряжения подключается к прямому входу суммирующего усилителя 9, при этом устройство работает аналогично тому, как описано для случая работы от задатчика 1 управляющего сигнала, при уровне тормозного давления Равт. соответствующем уровню выходного сигнала задатчика 3 опорного напряжения, т.е. осуществляется режим автоматического торможения. Одновременно с выхода элемента И 17 на вход элемента НЕ 19 поступает сигнал, в результате чего с выхода элемента НЕ 19 на второй вход элемента И 18 и, следовательно, на управляющий вход ключа 6 сигнал не подается, ключ 6 остается открытым.
При уменьшении скорости самолета ниже заданной компаратор 21 отключается, на выходе блока 22 задержки сигнал U22 сохраняется еще 3-5 с, в течение которых самолет затормаживается до полной остановки.
Если переключение произошло на стоянке, сигнал на второй вход элемента И 17 не подается. С его выхода не подается сигнал на коммутатор 15 и на входе элемента НЕ 19. Ключ 7 остается открытым, а на выходе элемента НЕ 19 появляется сигнал, поступающий на второй вход элемента И 18. В результате с выхода элемента Т 18 на управляющий вход ключа 6 подается сигнал U18, ключ 6 закрывается, соединяя задатчик 4 опорного напряжения с входом блока 8 выбора максимального сигнала, второй вход которого соединен через ключ 5 с задатчиком 1 управляющего сигнала.
При одновременном включении ручного и стартового режимов торможения на прямой вход суммирующего усилителя 9 подается сигнал от датчика 4 опорного напряжения, так как уровень сигнала задатчика 4 опорного напряжения больше уровня сигнала задатчика 1 управляющего сигнала. Тем самым обеспечивается работа устройства при уровне тормозного давления Рст, соответствующем уровню выходного сигнала задатчика 4 опорного напряжения, т.е. осуществляется режим стартового торможения.
Изобретение относится к системам управления летательных аппаратов. Цель изобретения - повышение надежности управления торможением колес. Это достигается введением в устройство задатчика 4 опорного напряжения, ключа 7, блока 8 выбора максимального сигнала, логических элементов И 17 и 18, логического элемента НЕ 19, формирователя 20 свободной скорости колеса, коммутатора 15, задатчика 23 порогового напряжения и блока 22 задержки. При этом выход задатчика 4 опорного напряжения соединен с первым входом ключа 7, на второй вход которого подается сигнал с выхода логического элемента И 17, выход ключа 7 подключен к второму входу блока 8 выбора максимального сигнала, на первый вход которого поступает сигнал с выхода ключа 5, выход блока 8 выбора максимального сигнала подключен к первому входу суммирующего усилителя 9, выход задатчика 16 режима торможения подключен к первым входам логических элементов И 17 и 18, выход датчика 14 угловой скорости колеса соединен с входом формирователя 20 свободной скорости колеса, выход которого подключен к первому входу компаратора 21, выход которого подключен к входу блока 22 задержки, выход которого подключен к второму входу логического элемента И 17, выход которого подключен к второму входу коммутатора 15 и входу логического элемента НЕ 19, выход которого соединен с вторым входом логического элемента И 18, а выход задатчика 23 порогового напряжения подключен к второму входу компаратора 21. 2 ил.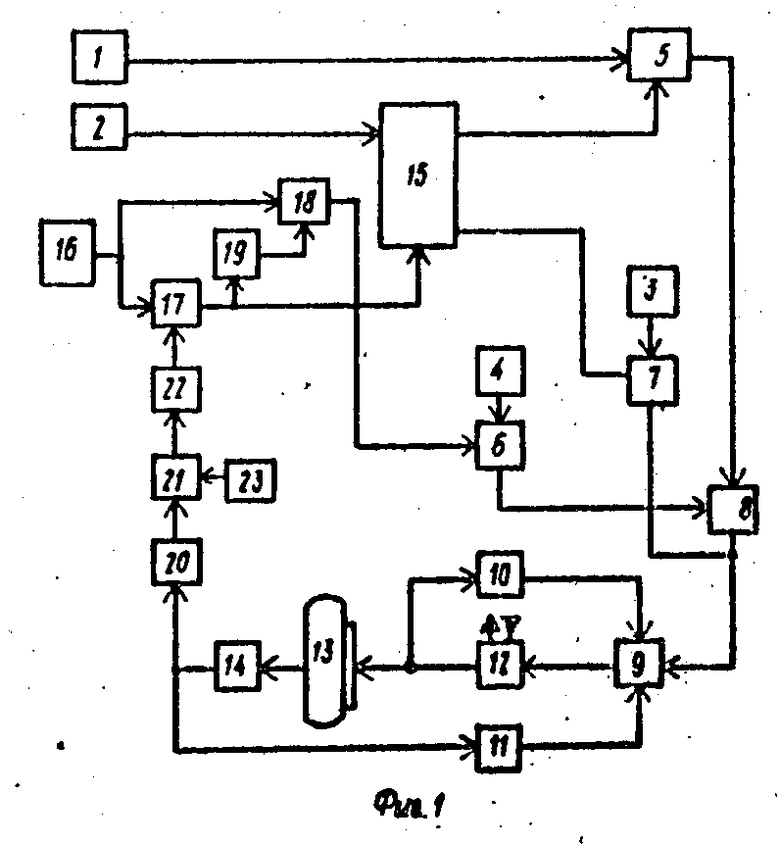
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ КОЛЕС САМОЛЕТА, содержащее электромеханический задатчик управляющего сигнала, концевой выключатель, первый задатчик опорного напряжения, первый и второй ключи, суммирующий усилитель, датчик давления в тормозе, антиюзовый автомат, электрогидравлический преобразователь, тормозной механизм, датчик угловой скорости колеса, коммутатор и задатчик режима торможения, при этом выход электромеханического задатчика управляющего сигнала подключен к первому входу первого ключа, к второму входу которого подключен первый выход коммутатора, к первому входу которого подключен выход концевого выключателя, второй выход коммутатора подключен к первому входу второго ключа, к второму входу которого подключен выход первого задатчика опорного напряжения, выход второго ключа соединен с первым входом суммирующего усилителя, выход которого подключен к управляющему входу электрогидравлического преобразователя, выход которого соединен с входами тормозного механизма и датчика давления в тормозе, выход которого подключен к второму инвертирующему входу суммирующего усилителя, к третьему инвертирующему входу которого подключен выход антиюзового автомата, вход которого соединен с выходом датчика угловой скорости колеса, а выход тормозного механизма подключен к входу датчика угловой скорости колеса, отличающееся тем, что, с целью повышения надежности управления торможением колес, в него введены второй задатчик опорного напряжения, третий ключ, блок выбора максимального сигнала первый и второй логические элементы И, логический элемент НЕ, формирователь свободной скорости колеса, компаратор, задатчик порогового напряжения и блок задержки, при этом выход второго задатчика опорного напряжения соединен с первым входом третьего ключа, второй вход которого соединен с выходом первого логического элемента И, выход третьего ключа подключен к второму входу блока выбора максимального сигнала, первый вход которого соединен с выходом первого ключа блока выбора максимального сигнала подключен к первому входу суммирующего усилителя, выход задатчика режима торможения подключен к первым входам первого и второго логических элементов И, выход датчика угловой скорости колеса соединен с входом формирователя свободной скорости колеса, выход которого подключен к первому входу компаратора, выход которого подключен к входу блока задержки, выход которого подключен к второму входу второго логического элемента И, выход которого подключен к второму входу коммутатора и входу логического элемента НЕ, выход которого соединен с вторым входом первого логического элемента И, а выход задатчика порогового напряжения подключен к второму входу компаратора.
| Авторское свидетельство СССР N 1108669, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
