Изобретение относится к машиностроению, в частности к системам торможения транспортных средств, и предназначено для использования преимущественно в объектах авиационной техники.
Известен способ управления торможением колес транспортного средства, заключающийся в том, что вычисляют значения опорной угловой скорости колеса, примерно соответствующей текущей скорости транспортного средства (с учетом проскальзывания колеса), и его углового замедления, которое сравнивают с допускаемым значением, и в случае превышения этого значения производят растормаживание колеса (см., например, патент США N 3958834, кл. B 60 T 8/02).
При использовании известного способа управления торможением колес в процессе торможения транспортного средства могут возникать сбросы тормозного давления при изменениях угловой скорости колеса, не связанных с изменениями условий сцепления колеса с дорожным покрытием (при наездах колеса на неровности дорожного покрытия, возникновении продольных колебаний подвески тормозного колеса и в других случаях), что приводит к увеличению дистанции торможения транспортного средства из-за ложных растормаживаний колеса.
Положительный результат, который может быть достигнут при использовании предлагаемого технического решения, выражается в повышении помехоустойчивости системы торможения транспортного средства без снижения при этом ее эффективности при всех условиях сцепления колес с дорожным покрытием за счет исключения ложных сбросов тормозного давления при изменениях угловой скорости колеса, не связанных с изменениями условий сцепления колеса с дорожным покрытием, в результате чего сокращается дистанция торможения транспортного средства, что в конечном итоге повышает его эксплуатационную надежность.
Указанный результат достигается тем, что растормаживание колеса при превышении его замедлением заданного допускаемого значения производят при условии уменьшения текущей угловой скорости колеса, сравниваемой с вычисляемым значением опорной угловой скорости, на величину более 2-6%.
Благодаря управлению торможением колес с использованием предлагаемого способа исключаются сбросы тормозного давления при изменениях угловой скорости колеса, не связанных с изменениями его условий сцепления с дорожным покрытием, в результате чего повышается эффективность торможения транспортного средства при всех условиях сцепления колес с дорожным покрытием.
На фиг. 1 представлена структурная схема одного из вариантов реализации антиюзовой системы торможения колес транспортного средства, использующей предлагаемое техническое решение.
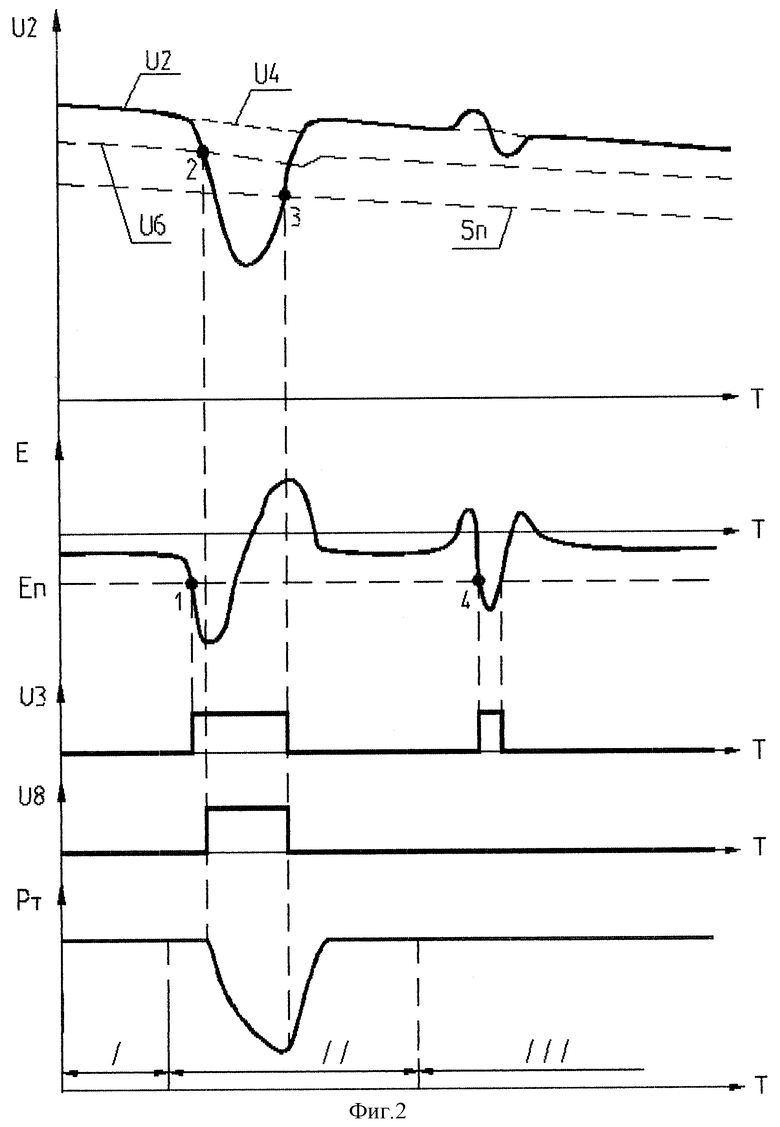
На фиг. 2 приведены графики изменения угловой скорости и замедления колеса, тормозного давления и других величин, иллюстрирующие предлагаемый способ управления торможением.
Система торможения (см. фиг. 1) содержит тормозное колесо 1, снабженное датчиком угловой скорости 2, электрический выход которого соединен с входами антиюзового автомата 3, устройства памяти 4 и компаратора 5. Устройство памяти 4 своим выходом связано со вторым входом автомата 3, а также через делитель 6 - со вторым входом компаратора 5, выход которого подключен к входу элемента И 7, второй вход которого соединен с выходом автомата 3, а выход - через усилитель мощности 8 - с управляющим входом клапана растормаживания 9, связанного гидравлическим выходом с тормозом колеса 1.
В процессе торможения транспортного средства заданное оператором тормозное давление через клапан 9 поступает в тормоз колеса 1, приводя к созданию тормозного момента, обеспечивающего затормаживание транспортного средства с заданной эффективностью. При достаточных условиях сцепления колеса с дорожным покрытием (участок I на фиг. 2) угловое замедление (E) и проскальзывание колеса не превышают допускаемых пороговых значений (Eп) и (Sп). При этом выходной сигнал (U3) антиюзового автомата 3 равен нулю, сигнал (U4) опорной угловой скорости на выходе устройства памяти 4 равен сигналу (U2) от датчика угловой скорости 2.
В случае ухудшения условий сцепления колеса с дорожным покрытием (участок II на фиг. 2) угловая скорость колеса (сигнал U2) начинает резко уменьшаться. При достижении угловым замедлением колеса (точка 1 на фиг. 2) значения (Eп) автомат 3 выдает сигнал (U3) на вход элемента И 7. При провалах угловой скорости колеса сигнал (U4) опорной угловой скорости (уменьшаясь с заданным темпом) примерно соответствует текущей скорости транспортного средства с учетом проскальзывания колеса. Проходя через делитель 6 с коэффициентом передачи (k), сигнал (U4) в виде сигнала U6 = U4•k поступает на вход компаратора 5. При уменьшении (точка 2 на фиг. 2) сигнала (U2) ниже сигнала (U6) компаратор 5 выдает сигнал на второй вход элемента И 7, в результате чего сигнал (U7) подается через усилитель 8 в виде сигнала (U8) на управляющий вход клапана 9, приводя к уменьшению тормозного давления (Pт). После раскрутки колеса и достижения (точка 3 на фиг. 2) допускаемого проскальзывания (Sп) сигнал (U3) с выхода автомата 3 снимается, давление (Pт) вновь подается в тормоз колеса.
При наезде колеса на неровность дорожного покрытия или возникновении продольных колебаний подвески тормозного колеса (участок III на фиг. 2) его угловая скорость изменяется незначительно, однако возникающее при этом замедление (E) превышает допускаемое значение (Eп), в результате чего на выходе автомата 3 появляется сигнал (U3) на растормаживание колеса (точка 4 на фиг. 2). Поскольку сигнал (U2) на входе компаратора 5 не снижается до сигнала (U6) на другом его входе, выходные сигналы компаратора 5 и элемента 7 остаются равными нулю, не пропуская сигнал (U3) на вход клапана 9, исключая сброс тормозного давления.
Таким образом, при использовании предлагаемого способа осуществляется защита от ложных сбрабатываний антиюзового автомата, повышая эффективность торможения транспортного средства.
Коэффициент передачи (k) делителя 6 выбирается в пределах 0,98-0,94 (что соответствует относительному проскальзыванию колеса 2-6%) в зависимости от типа применяемого антиюзового автомата, обеспечиваемого быстродействия в гидравлическом тракте системы торможения, тангенциальной упругости пневматики колеса, механической жесткости подвески тормозного колеса и других параметров конкретной системы торможения. Уменьшение порогового значения проскальзывания ниже 2% ограничивается реальной совокупной точностью измерительных и вычислительных элементов системы, а увеличение его выше 6% нецелесообразно в связи с возникновением запаздывания растормаживания колеса, снижающего эффективность работы антиюзового автомата.
Изобретение относится к системам торможения транспортных средств. Растормаживание колеса при превышении его замедлением заданного допустимого значения производят при условии уменьшения текущей угловой скорости колеса, сравниваемой с вычисляемым значением опорной угловой скорости, на величину более 2-6%. Технический результат выражается в повышении помехоустойчивости системы торможения без снижения ее эффективности при всех условиях сцепления колес с дорожным покрытием за счет исключения ложных сбросов тормозного давления. 2 ил.
Способ автоматического управления торможением колес транспортного средства, заключающийся в том, что вычисляют значения опорной угловой скорости колеса, соответствующей текущей скорости транспортного средства с учетом проскальзывания колеса, и его углового замедления, которое сравнивают с допускаемым значением, и при превышении этого значения производят растормаживание колеса, отличающийся тем, что растормаживание колеса при превышении его замедлением допускаемого значения производят при условии уменьшения текущей угловой скорости колеса, сравниваемой с вычисляемым значением опорной угловой скорости, на величину более 2 - 6%.
| US 3958834 A, 25.05.1976 | |||
| US 5043658 A, 27.08.1991 | |||
| US 5427441 A, 27.06.1995 | |||
| JP 03086670 A, 11.04.1991 | |||
| УСТРОЙСТВО ДЛЯ ПРОКЛАДКИ СЕТКИ В БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЕ | 2000 |
|
RU2205910C1 |
| Способ предупреждения блокирования колеса автомобиля | 1977 |
|
SU783081A1 |
| Способ автоматического управленияКОлЕСНыМи ТОРМОзАМи пРи НАЕздЕ НАучАСТОК C пОНижЕННыМ СцЕплЕНиЕМ | 1975 |
|
SU823195A1 |
| Способ регулирования качения колеса в тормозном режиме | 1980 |
|
SU878627A1 |
