Изобретение относится к электротехнике и может быть использовано в качестве исполнительного устройства дискретного привода в автоматических системах с цифровым управлением.
Известны шаговые двигатели, представляющие собой синхронные электродвигатели, в которых электрические импульсы в обмотках преобразуются при взаимодействии магнитных полей якоря и статора в дискретные угловые перемещения якоря, такие, например, как шаговые двигатели, описанные в книге Д.Э.Брускина, А.Е.Зороховича, В.С.Хвостова "Электрические машины и микромашины" (М., "Высшая школа", 1990 г. стр.389÷398) или, например, шаговый двигатель по патенту РФ №2101840, м. кл. Н 02 К 37/00, Н 02 Р 8/00, опубликованному 10.01.98 г.
Общим недостатком этих двигателей является низкий КПД (порядка 0,01 и менее) и низкий стопорный момент в обесточенном положении прибора, который не превышает величину 0,1...0,2 номинального момента.
Известны электромеханические шаговые двигатели, в которых электрические импульсы в обмотках электромагнитов преобразуются в дискретные условия перемещения выходного вала в результате механических связей между якорем и выходным валом, например храповым механизмом, такие как шаговый электродвигатель по авторскому свидетельству СССР №1023567, м. кл. Н 02 К 37/00, опубликованному 15.06.83 г., или шаговый электродвигатель по патенту РФ №2077108, м. кл. Н 02 К 37/00, 7/06, опубликованному 10.04.97 г.
Эти шаговые электродвигатели имеют достаточно высокий стопорный момент, но их недостатком является малый КПД (порядка 0,01) и малый ресурс работы вследствие ударного режима работы деталей (наличия соударяющихся элементов).
Низкий КПД указанных двигателей обусловлен принципом работы - необходимостью быстрого разгона якоря и последующего торможения, которое в первой указанной группе двигателей осуществляется тормозными электромагнитными обмотками, а во второй - механическим торможением деталей. Таким образом, энергия, затраченная на разгон якоря и приводимого им механизма, в первом случае должна быть погашена энергией, затрачиваемой на торможение, а во втором случае расходуется на удар о стопорное устройство.
Наиболее близким по совокупности признаков к предлагаемому техническому решению является электромеханический шаговый двигатель по а.с. СССР №288109, м. кл. Н 02 К 37/00, опубликованный 03.12.70.
Известный шаговый двигатель, как и заявляемый, содержит выходной кривошипный вал и неподвижно установленный в корпусе электромагнит, на оси якоря которого жестко закреплена кулиса, охватывающая своей вилкой цапфу кривошипного вала.
В отличие от предлагаемого двигателя известный двигатель содержит также рычаг и коромысло, причем рычаг связан возвратной пружиной с корпусом и второй пружиной - с нижним концом коромысла, верхний конец которого третьей пружиной связан с корпусом.
Известный шаговый двигатель обладает высоким КПД и ресурсом работы. Высокий КПД обусловлен тем, что энергия притяжения якоря преобразуется механизмом шагового двигателя на первом участке, когда якорь притягивается, при совершении полезной работы, в энергию разгона кривошипа и энергию натяжения пружин, которые на втором участке, при отпускании якоря, преобразуются в полезную работу на привод механизма. Высокий ресурс определяется отсутствием в конструкции соударяющихся и трущихся деталей и минимальным износом взаимодействующих между собой поверхностей.
Однако известный двигатель обладает следующими недостатками:
1. Быстродействие двигателя ограничено, что обусловлено следующими причинами:
- коромысло, смонтированное на цапфе выходного кривошипного вала, и подвижные элементы опоры обладают значительными массами и соответственно моментами инерции;
- максимальная величина момента, создаваемая пружинным механизмом, который должен преодолеть электромагнит, почти в три раза превосходит средний момент, создаваемый пружинами на рабочем участке. Соответственно в механизме создаются большие усилия, требующие для обеспечения прочности увеличения размеров деталей, что приводит к увеличению моментов инерции и, в конечном итоге, не позволяют при увеличении мощности электромагнита в соответствующей степени увеличить быстродействие механизма.
2. Номенклатура шаговых двигателей по а.с. №288109 ограничена, что обусловлено тем, что геометрические параметры деталей механизма двигателя, такие как радиус кривошипа, длины плеч коромысла, длины рычагов и т.п., для обеспечения рабочего момента на выходном валу связаны между собой сложными зависимостями и не могут быть заданы произвольно. Поэтому, например, уменьшение радиуса кривошипа уменьшает ход коромысла, соответственно уменьшает момент для преодоления мертвой точки, требует увеличения длины рычага и т.д., что препятствует созданию двигателя с меньшей мощностью и большей частотой срабатывания.
3. Область применения известного двигателя ограничена, поскольку для его реверсирования необходимо переключающее электромеханическое устройство, изменяющее положение зацепа пружины, который связывает верхний конец коромысла с корпусом, что существенно усложняет конструкцию и схему управления, и, кроме того, сдвигает исходное положение кривошипного вала при реверсе на некоторый угол от исходного положения при прямом ходе (примерно 10% полного углового шага) и, следовательно, не позволяет проводить реверсирование с достаточной точностью.
В основу изобретения поставлена задача создать такой электромеханический реверсивный шаговый двигатель, в котором введение второго электромагнита с кулисой, смещение осей кулис относительно друг друга с образованием угла между кулисами больше 0° и меньше 180°, установка кривошипного вала с возможностью взаимодействия с обеими кулисами как в прямом, так и в обратном направлениях, позволило бы уменьшить моменты инерции выходного вала двигателя и, следовательно, повысить его быстродействие; исключить необходимость соблюдения сложных зависимостей между размерами деталей двигателя и, следовательно, расширить номенклатуру двигателей; обеспечить реверсирование двигателя без усложнения его конструкции с обеспечением достаточной точности и, таким образом, расширить область его применения.
Кроме того, предлагаемое изобретение обеспечивает получение дополнительного результата - упрощения двигателя, поскольку за счет введения новых признаков в предложенном двигателе отсутствуют рычаг и коромысло, а также обеспечивающие их упругую связь между собой и с корпусом пружины.
Поставленная задача решается тем, что в электромеханический шаговый двигатель, содержащий выходной кривошипный вал и неподвижно установленный в корпусе электромагнит, на оси якоря которого жестко закреплена кулиса, охватывающая своей вилкой цапфу кривошипного вала, согласно изобретению, введены следующие существенные признаки, отличные от прототипа.
В заявляемый электродвигатель введен аналогичный электромагнит с кулисой, оси кулис смещены относительно друг друга, причем кулисы образуют угол больше 0° и меньше 180° и соединены соответствующими упругими связями с корпусом, а кривошипный вал установлен с возможностью взаимодействия с обеими кулисами как в прямом, так и в обратном направлениях.
Введение второй подпружиненной кулисы, расположенной под некоторым углом к первой и установленной на оси якоря аналогичного электромагнита, позволяет не только увеличить быстродействие за счет уменьшения моментов инерции движущихся масс и снижения максимальных нагрузок на механизм, но и расширить диапазон номенклатуры создаваемых двигателей как в сторону увеличения, так и уменьшения мощности за счет устранения геометрических зависимостей между деталями механизма. Выполнение кривошипного вала взаимодействующим с обеими кулисами позволяет производить реверсирование простым изменением порядка поступление импульсов в обмотки электромагнитов.
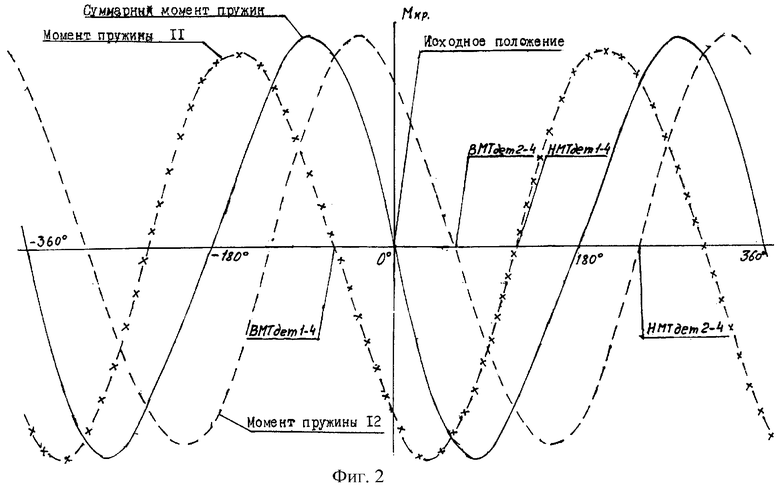
На фиг.1 приведена кинематическая схема заявляемого двигателя, на фиг.2 - циклограмма крутящих моментов, создаваемых пружинами на выходном кривошипном валу шагового двигателя, на фиг.3 - диаграмма управляющих импульсов.
Электромеханический реверсивный шаговый двигатель содержит две кулисы 1, 2, выходной вал 3 с кривошипом 4. Кулисы 1, 2 установлены соответственно на вращающихся осях 5, 6 якорей 7, 8 электромагнитов 9, 10. Кулисы 1, 2 соответственно пружинами 11, 12 связаны с корпусом 13.
Кулисы 1, 2 охватывают своими вилками цапфу кривошипа 4 выходного вала 3. Оси 5, 6 смещены относительно друг друга таким образом, что кулисы 1, 2 образуют угол, величина которого больше 0° и меньше 180°.
Предлагаемый двигатель работает следующим образом. В исходном положении механизм находится в устойчивом уравновешенном состоянии под действием пружин 11, 12.
На циклограмме (фиг.2) указаны положения верхних мертвых точек (ВМТ) и нижних мертвых точек (НМТ) деталей механизма. Выше оси абсцисс (фиг.2) показаны положительные моменты, создаваемые пружинами 11, 12 при вращении выходного кривошипного вала 3 по часовой стрелке. Ниже от абсцисс - отрицательные моменты. Соответственно при вращении выходного кривошипного вала 3 против часовой стрелки положительные моменты, направленные в сторону вращения, располагаются под осью абсцисс. При подаче импульса тока в обмотку одного из электромагнитов (ЭМ), например 9 (фиг.3а), якорь 7, притягиваясь под действием электромагнитного поля к сердечнику, увлекает за собой кулису 1, которая, поворачиваясь вокруг оси 5 по часовой стрелке, вилкой давит на цапфу кривошипа 4 выходного вала 3 и растягивает пружину 11. Под действием кулисы 1 и кулисы 2, притягиваемой пружиной 12, кривошип 4 выходного вала 3 начинает поворачиваться по часовой стрелке до верхней мертвой точки пары кулиса 2 - кривошип 4. Вблизи мертвой точки в обмотку электромагнита 10 подается импульс тока (фиг.3б) и якорь 8, притягиваясь к сердечнику, разворачивает кулису 2 вокруг оси 6 против часовой стрелки, растягивая пружину 12. Кулиса 2 вилкой давит на кривошип 4 в направлении вращения выходного вала 3 по часовой стрелке. Вблизи нижней мертвой точки пары кулиса 1 - кривошип 4 с обмотки электромагнита 9 снимается напряжение, и кулиса 1, разворачиваясь под действием пружины 11 против часовой стрелки, помогает электромагниту 10 двигать выходной кривошипный вал 3 по часовой стрелке до нижней мертвой точки пары кулиса 2 - кривошип 3, вблизи которой с электромагнита 10 снимается напряжение. Движение выходного кривошипного вала 3 до исходного положения продолжается под суммарным воздействием пружины 11 и 12. Вращение в обратном направлении происходит при подаче импульса тока сначала в обмотку электромагнита 10 (фиг.3в), а затем в обмотку электромагнита 9 (фиг.3г).
Таким образом, введение новых признаков позволило создать электромеханический шаговый двигатель с возможностью реверсирования, с высоким КПД, ресурсом работы, быстродействием и более широким диапазоном мощностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1970 |
|
SU288109A1 |
| Привод электротехнического аппарата | 1975 |
|
SU652622A1 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2441997C1 |
| Устройство для наладки датчиков контроля роторных автоматов | 1976 |
|
SU643741A1 |
| Механизм кнопочного управления приводом ткацкого станка | 1990 |
|
SU1756417A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2441996C1 |
| Гидравлическая передача | 1934 |
|
SU41553A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ КРЕПЕЖНЫХ ЭЛЕМЕНТОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПРЕИМУЩЕСТВЕННО СКОБ | 1991 |
|
RU2013485C1 |
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| СПОСОБ СОЗДАНИЯ СИЛОВЫХ ИМПУЛЬСОВ И УДАРНЫЙ ИНВЕРСИОННЫЙ ДЕЗАКСИАЛЬНЫЙ МЕХАНИЗМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2407900C2 |

Изобретение относится к области электротехники и может быть использовано в качестве исполнительного устройства дискретного привода в автоматических системах с цифровым управлением. Шаговый двигатель содержит кривошипный вал и два установленных в корпусе аналогичных электромагнита, на осях якорей каждого из которых жестко закреплена кулиса, охватывающая своей вилкой цапфу кривошипного вала. Оси кулис смещены относительно друг друга. Кулисы образуют угол больше 0° и меньше 180° и соединены соответствующими упругими связями с корпусом. Кривошипный вал установлен с возможностью взаимодействия с обеими кулисами в процессе его поворота как в прямом, так и в обратном направлении. Технический результат заключается в повышении быстродействия, обеспечении реверсирования без усложнения конструкции двигателя, а также исключении необходимости соблюдения сложных зависимостей между размерами деталей двигателя. 3 ил.
Электромеханический реверсивный шаговый двигатель, содержащий выходной кривошипный вал и неподвижно установленный в корпусе электромагнит, на оси якоря которого жестко закреплена кулиса, охватывающая своей вилкой цапфу кривошипного вала, отличающийся тем, что в него введен аналогичный электромагнит с кулисой, оси кулис смещены относительно друг друга, причем кулисы образуют угол больше 0° и меньше 180° и соединены соответствующими упругими связями с корпусом, а кривошипный вал установлен с возможностью взаимодействия с обеими кулисами в процессе его поворота как в прямом, так и в обратном направлениях.
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 0 |
|
SU288109A1 |

