Изобретение относится к сельскому хозяйству, а именно к животноводству на промышленной основе, и может быть использовано в системах кормораздачи.
Целью изобретения является повыше- ние точности дозирования путем учета физико-механических свойств жидкого корма.
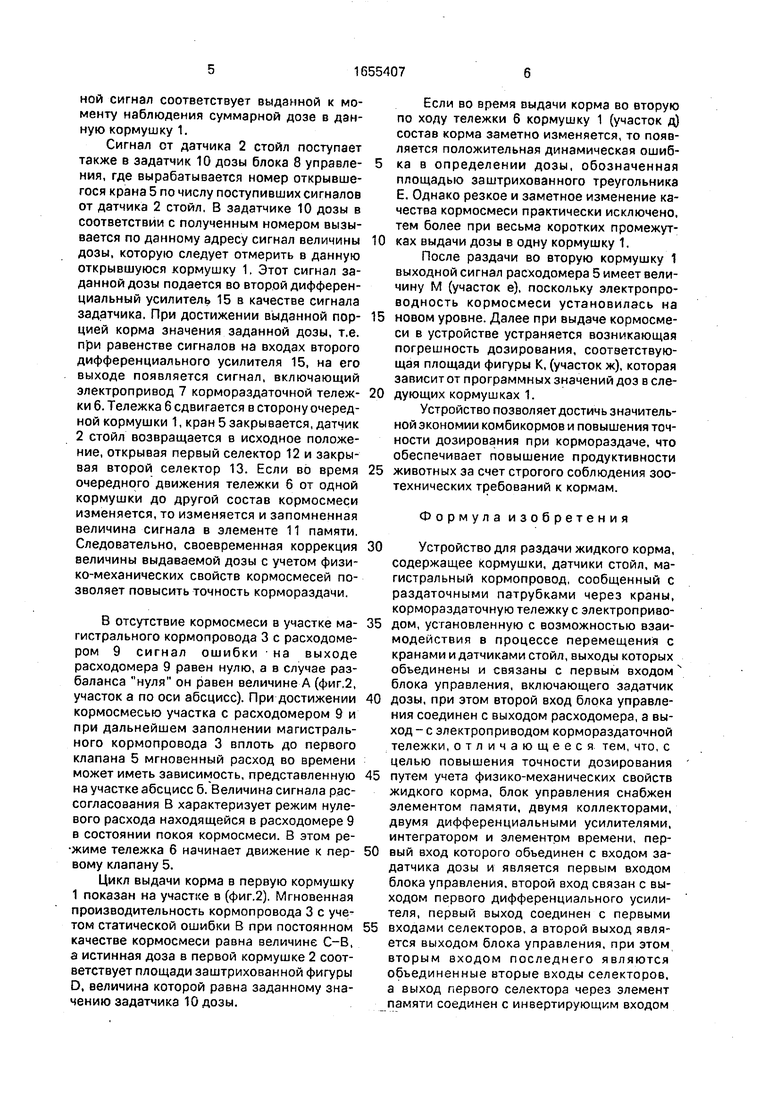
На фиг.1 представлена схема устройства; на фиг.2 - циклограмма работы устройства.
Устройство для раздачи корма содержит кормушки 1, датчики 2 стойл, магистральный кормопровод 3, сообщенный с раздаточными патрубками 4 через краны 5, кормораздаточную тележку 6 с электропри- водом 7, установленную с возможностью взаимодействия в процессе перемещения с кранами бис датчиками 2 стойл, выходы которых объединены и связаны с первым входом блока 8 управления, второй вход которого соединен с выходом расходомера 9, а выход - с электроприводом 7 кормораздаточной тележки 6.
Причем блок 8 управления снабжен за- датчиком 10 дозы, элементом 11 памяти, первым и вторым селекторами 12 и 13, первым и вторым дифференциальными усилителями 14 и 15, интегратором 16 и элементом 17 времени , первый вход которого объединен с входом задатчика 10 дозы и является первым входом блока 8 управления, второй вход связан с выходом второго дифференциального усилителя 15, первый вход соединен с объединенными первыми входами первого и второго селекторов 12 и
13,а второй выход является выходом блока 8 управления, при этом вторым входом последнего являются объединенные вторые входы первого и второго селекторов 12 и 13,
а выход первого селектора 12 через элемент 11 памяти соединен с инвертирующим входом первого дифференциального усилителя
14,с неинвертирующим входом которого связан выход второго селектора 13, а выход первого дифференциального усилителя 14 через интегратор 16 подключен к инвертирующему входу второго дифференциального усилителя 15, неинвертиующий вход которого связан с выходом задатчика 10 дозы.
В качестве расходомера 9 используют индукционный расходомер ИР-61. Задат- чик 10 дозы представляет собой программируемое адресное устройство на базе интегральных микросхем серии К 155 или аналогичных с кнопочным наборным полем адреса (номера кормушки) и кода задания (дозы) .Элемент 17 времени состоит из дифференцирующих усилительных цепей, задержек по времени и реализует функции
передачи импульсных сигналов от датчиков 2 стойл к электроприводу 7 кормораздаточной тележки 6 и к селекторам 12 и 13 от второго дифференциального усилителя 15 с соответствующими временными задержками для нормального функционирования механической части устройства. Датчики 2 стойл представляют собой обычные подпружиненные кнопки.
Устройство для раздачи жидкого корма работает следующим образом.
При включении кормораздачи кормораздаточная тележка 6 начинает движение по направляющим вдоль кормопровода 3. Одновременно запускается насосный агрегат и подается в кормопровод 3 жидкая или полужидкая кормосмесь, которая до кормушек 1 не доходит, поскольку закрыты все краны 5. При подъезде кормораздаточной тележки 6 к первому по ходу ее движения крану 5, соответствующему первой кормушке 1, срабатывает пришедший во взаимодействие с тележкой б датчик 2 стойл, сигнал от которого вызывает отключение электропривода 7, и тележка 6 останавливается, приоткрывая при этом кран 5.
Кормосмесь через кран 5 устремляется в кормушку 1. Расходомер 9 проточного типа выдает сигнал мгновенного расхода кормосмеси, который содержит некоторую статическую погрешность, обусловленную отличием выходного сигнала расходомера 9 от заданного (нулевого) при нулевом расходе.
Погрешность вызывается отличием кормосмеси по физико-механическим свойствам от эталонной, при которой производилась настройка на нуль расходомера 9.
Данная погрешность уже хранится в элементе 11 памяти, поскольку во время движения тележки 6 сигнал расходомера 9 о величине этой погрешности поступал через открытый первый селектор 12 на элемент 11 памяти, а второй селектор 13 был закрыт.
При поступлении кормосмеси в открывшуюся кормушку 1 сигнал датчика 2 стойл вызывает открытие второго селектора 13 и закрытие первого селектора 12. При этом в первом дифференциальном усилителе 14 начинается процесс вычитания из мгновенного сигнала расходомера 9, содержащего статическую ошибку, величины этой статической ошибки в последний момент перед выдачей кормосмеси. Следовательно, выходной сигнал первого дифференциального усилителя 14 соответствует истинному мгновенному расходу кормосмеси.
Интегратор 16 преобразует мгновенный расход в интегральный, т.е. его выходной сигнал соответствует выданной к моменту наблюдения суммарной дозе в данную кормушку 1.
Сигнал от датчика 2 стойл поступает также в задатчик 10 дозы блока 8 управления, где вырабатывается номер открывшегося крана 5 по числу поступивших сигналов от датчика 2 стойл, В задатчике 10 дозы в соответствии с полученным номером вызывается по данному адресу сигнал величины дозы, которую следует отмерить в данную открывшуюся кормушку 1, Этот сигнал заданной дозы подается во второй дифференциальный усилитель 15 в качестве сигнала задатчика. При достижении выданной порцией корма значения заданной дозы, т.е. при равенстве сигналов на входах второго дифференциального усилителя 15, на его выходе появляется сигнал, включающий электропривод 7 кормораздаточной тележки 6. Тележка 6 сдвигается в сторону очередной кормушки 1, кран 5 закрывается, датчик 2 стойл возвращается в исходное положение, открывая первый селектор 12 и закрывая второй селектор 13. Если во время очередного движения тележки б от одной кормушки до другой состав кормосмеси изменяется, то изменяется и запомненная величина сигнала в элементе 11 памяти. Следовательно, своевременная коррекция величины выдаваемой дозы с учетом физико-механических свойств кормосмесей позволяет повысить точность кормораздачи.
В отсутствие кормосмеси в участке магистрального кормопровода 3 с расходомером 9 сигнал ошибки на выходе расходомера 9 равен нулю, а в случае разбаланса нуля он равен величине А (фиг,2, участок а по оси абсцисс). При достижении кормосмесью участка с расходомером 9 и при дальнейшем заполнении магистрального кормопровода 3 вплоть до первого клапана 5 мгновенный расход во времени может иметь зависимость, представленную на участке абсцисс б. Величина сигнала рассогласования В характеризует режим нулевого расхода находящейся в расходомере 9 в состоянии покоя кормосмеси. В этом ре- жиме тележка 6 начинает движение к первому клапану 5.
Цикл выдачи корма в первую кормушку 1 показан на участке в (фиг.2). Мгновенная производительность кормопровода 3 с учетом статической ошибки В при постоянном качестве кормосмеси равна величине С-В, а истинная доза в первой кормушке 2 соответствует площади заштрихованной фигуры D, величина которой равна заданному значению задатчика 10 дозы.
Если во время выдачи корма во вторую по ходу тележки 6 кормушку 1 (участок д) состав корма заметно изменяется, то появляется положительная динамическая ошибка в определении дозы, обозначенная площадью заштрихованного треугольника Е. Однако резкое и заметное изменение качества кормосмеси практически исключено, тем более при весьма коротких промежутках выдачи дозы в одну кормушку 1.
После раздачи во вторую кормушку 1 выходной сигнал расходомера 5 имеет величину М (участок е), поскольку электропроводность кормосмеси установилась на
новом уровне. Далее при выдаче кормосмеси в устройстве устраняется возникающая погрешность дозирования, соответствующая площади фигуры К, (участок ж), которая зависит от программных значений доз вследующих кормушках 1.
Устройство позволяет достичь значительной экономии комбикормов и повышения точности дозирования при кормораздаче, что обеспечивает повышение продуктивности
животных за счет строгого соблюдения зоотехнических требований к кормам.
Формула изобретения
Устройство для раздачи жидкого корма, содержащее кормушки, датчики стойл, магистральный кормопровод, сообщенный с раздаточными патрубками через краны, кормораздаточную тележку с электроприводом, установленную с возможностью взаимодействия в процессе перемещения с кранами и датчиками стойл, выходы которых объединены и связаны с первым входом блока управления, включающего задатчик
дозы, при этом второй вход блока управления соединен с выходом расходомера, а выход - с электроприводом кормораздаточной тележки, отличающееся тем, что, с целью повышения точности дозирования
путем учета физико-механических свойств жидкого корма, блок управления снабжен элементом памяти, двумя коллекторами, двумя дифференциальными усилителями, интегратором и элементом времени, первый вход которого объединен с входом задатчика дозы и является первым входом блока управления, второй вход связан с выходом первого дифференциального усилителя, первый выход соединен с первыми
входами селекторов, а второй выход является выходом блока управления, при этом вторым входом последнего являются объединенные вторые входы селекторов, а выход первого селектора через элемент памяти соединен с инвертирующим входом
первого дифференциального усилителя, с неинвертирующим входом которого связан выход второго селектора, а выход первого дифференциального усилителя через инвертор подключен к инвертирующему входу
второго дифференциального усилителя, неинвертирующий вход которого связан с выходом задатчика дозы.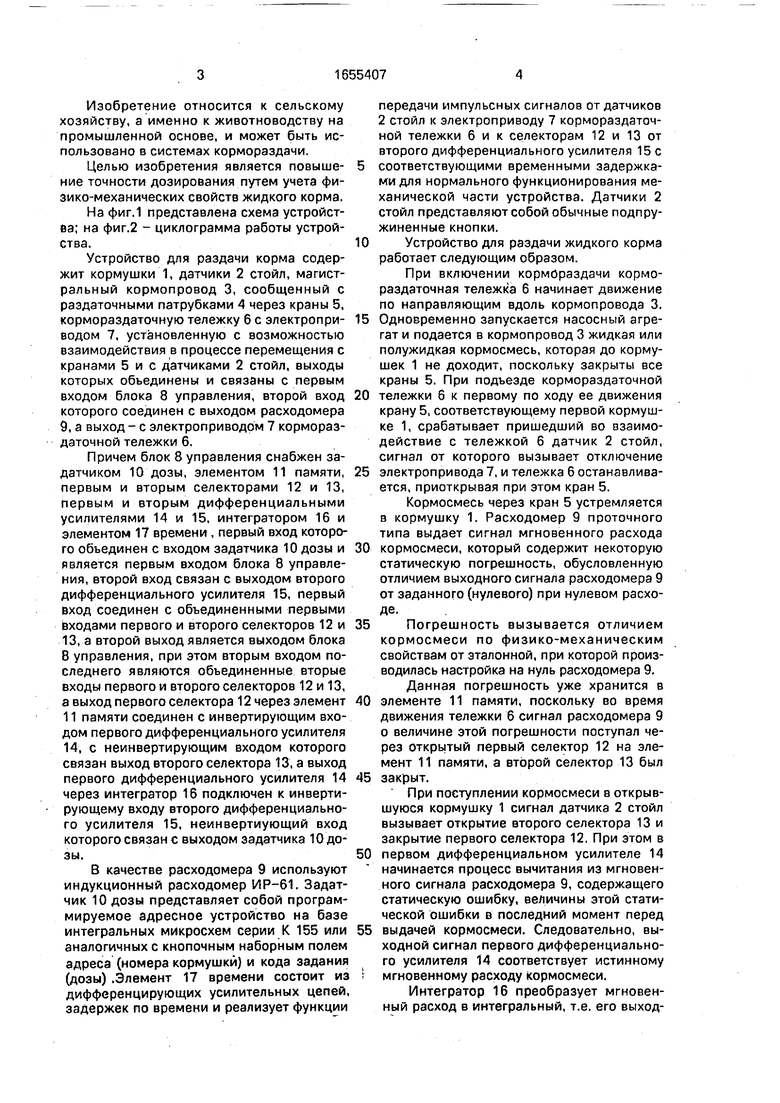
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655406A1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |
| Устройство для раздачи жидких кормов | 1990 |
|
SU1743511A1 |
| Устройство для автоматического дозирования жидких кормов | 1987 |
|
SU1475562A1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Устройство для раздачи жидких кормов | 1983 |
|
SU1205844A1 |
| Способ раздачи кормов в устройство для его осуществления | 1986 |
|
SU1496730A1 |
| Устройство для раздачи влажных кормов | 1989 |
|
SU1662453A1 |
| Устройство для раздачи жидких кормов | 1984 |
|
SU1209126A1 |
| Устройство для порционного кормления животных | 1986 |
|
SU1375204A1 |
Изобретение относится к сельскому хозяйству, а именно к промышленному животноводству, и может быть использовано в системах кормораздачи. Цель изобретения - повышение точности дозирования путем учета физико-механических свойств жидкого корма. Устройство для раздачи жидкого корма содержит кормушки 1, магистральный кормопровод 3, снабженный раздаточными патрубками 4, каждый из которых оснащен краном 5, кормораздаточную тележку б с электроприводом 7, установленную с возможностью взаимодействия в процессе перемещения с кранами 5 и датчиками 2 стойл животных. Выходы датчиков 2 всех стойл в животноводческом помещении объединены и связаны с первым входом блока 8 управления, второй вход которого соединен с выходом расходомера 9. Расходомер 9 установлен на входном участке кор- мопровода 3 до раздаточных патрубков 4. Выход блока 8 управления подключен к входу электропривода 7 кормораздаточной тележки 6. Причем в блоке 8 управления входы первого дифференциального усилителя 14 подключены к второму входу блока управления через второй селектор 13 и через последовательно связанные элемент 11 памяти и первый селектор 12, При отклонении физи- ко-механическх свойств жидкого корма от заданных на выходе расходомера 9 появляется сигнал рассогласования, подаваемый на второй вход блока 8 управления. Последний определяет действительный мгновенный расход корма в кормопроводе, сравнивает его с заданным и с учетом величины сигнала рассогласования осуществляют управление процессом выдачи требуемой порции корма в каждую кормушку 1 путем изменения времени открытия крана 5. 2 ил. сл с о сл сл о VJ
Выходной сигнал расходомера (мгно&9нный расход, м3/с
В А
ж врем я, с
| Устройство для раздачи жидких кормов | 1983 |
|
SU1205844A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
