(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РАЗДАЧИ КОРМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Автоматический питатель раздатчика кормов | 1986 |
|
SU1445651A1 |
| Способ раздачи кормов в устройство для его осуществления | 1986 |
|
SU1496730A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |
| Линия для раздачи кормов в рыбо-ВОдНыХ САдКАХ | 1979 |
|
SU843895A2 |
| Раздатчик жидких кормов | 1988 |
|
SU1584851A1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1984 |
|
SU1168159A1 |
| Устройство индивидуальной раздачи кормов | 1989 |
|
SU1782497A1 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ МНОГОКОМПОНЕНТНЫХ СМЕСЕЙ | 2012 |
|
RU2494658C1 |
1
Изобретение от.носится к сельскому хозяйству, в iiacT-ности к устройствам для раздачи кормов лшвотным на комп.лексах и фермах .
Известно устройство для автоматич&ской раздачи корма животным, содержащее блок программы связанный через коммутатор с блоками управления исполнительными органами дозатора и питателем 1.
Недостатком известного устройства является низкая эффективность расхода корма.
Наиболее близким по технической сущности к предложенному изобретению является устройство, содержащее блок программы, связанный через коьшутатор с блоком управления исполнитель-гным органом питателя и задатчиком дозы корма,- датчик кормушки, связанный с блоками управления исполнительными органами дозатора и впускной калитки, блок распознавания животных, датчик животного -и блок управления исполнительным органом конвейера-.(J.
Недостатком данного устройства является низкая эффективность расхода корма, обусловленная отсутствием блоков и связей, обеспечивающих согласование впуска животных к кормушкам с работой дозатора.
Цель изобретения - повышение эффективности расхода корма.
Поставленная цель достигается тем, что оно снабжено, блоком буферной памяти с двумя входами, регистром сдвига, двумя схемами И и датчиком питателя и датчиками дозатора,- и впуск10ной калитки, причем первый вход блока буферной памяти соединен с блоком распознавания животного, а второй через первую схему И соединен с датчиками питателя и дозатора, выход
15 блока буферной памяти соединен с блоком программы, вход блока управления исполнительным органом конвейера через вторую схему И соединен с датчиками кормушки животного и впускной
20 калитки-, а вход блока управления исполнительным органом впускной калитки соединен с регистром сдвига, входы регистра сдвига соединены с датчиком кормушки и датчиком дозатора,
25 который соединен с блоками управления исполнительными органами питателя и дозатора.
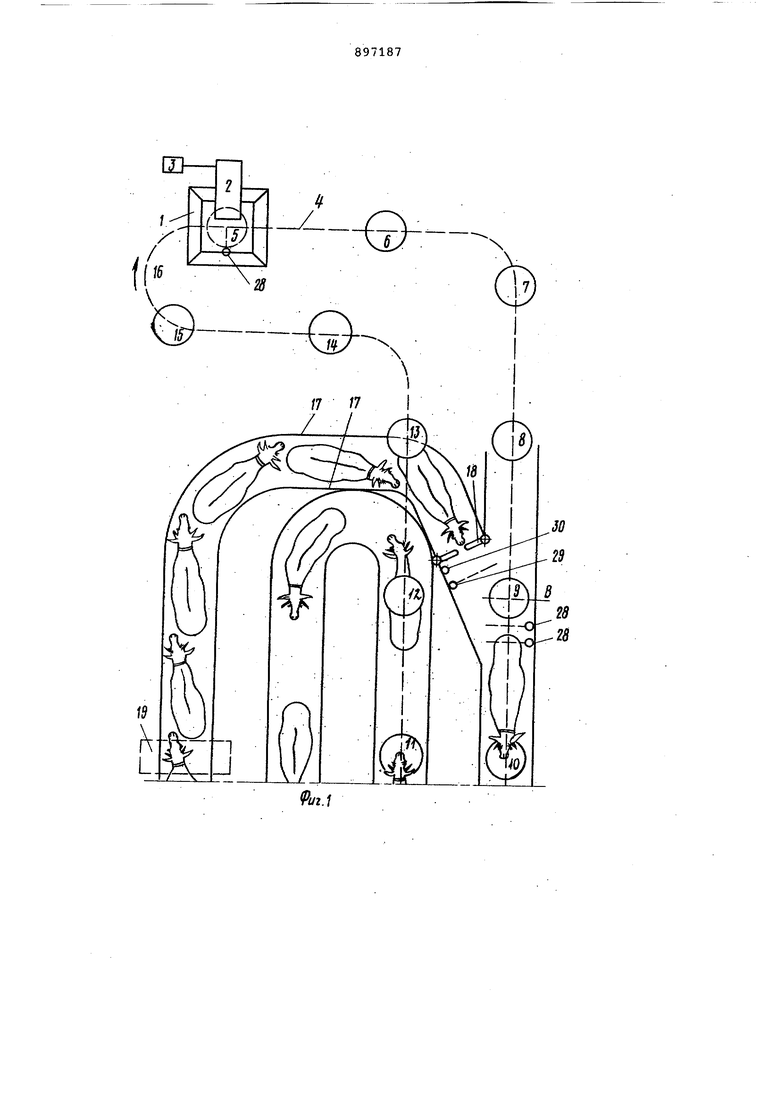
На фиг. 1 приведена технологическая схема устройства для автоматической раздачи корма животным; на
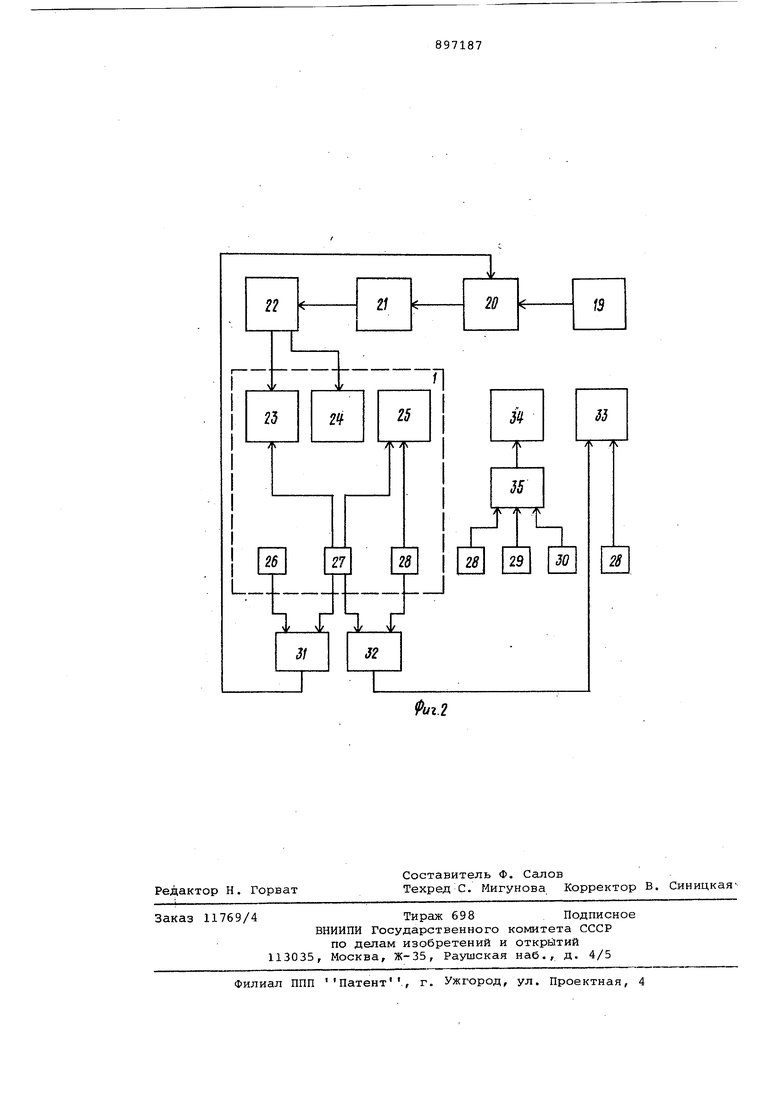
фиг. 2 - блок-схема устройства автоматической раздачи корма.
Устройство содержит дозатор 1, питатель 2 с исполнительным органом 3 питателя, цепь 4 кормового конвейера с подвешеннЕлми на ней кормушками 5-15, исполнительный орган 16 конвейера, ограждения 17 скотопроходов, калитку 18 впуска животных к кормушкам, блок распознавания 19 животных, буферную память 20, программное устройство 21, коммутатор 22, блок 23 управления исполнительным органом питателя, задат-чик 24 дозы корма, блок 25 управления исполнительным органом дозатора, датчики 26 питателя, датчик 27 дозатора, датчик 28 кормушек, датчик 29 животного, датчик 30 впускной калитки, схему И 31, регистр, сдвига 32, блок 33 управления исполнительным органом калитки, впуском животных, блок 34 управления исполнительным органом конвейера, схему совпадения 35, в котором программное устройство ,21 связано через коммутатор 22 с блоком 23 управления исполнительным органом 3 питателя и задатчиком 24 дозы корма, датчики 28 кормушек, связанные с блоком 25 управления исполнительным органом дозатора и блоком 33 управления исполнительным органом впускной калитки, первый вход eyOepHcfr: памяти 20 соединен с устройством распознавания животного, а второй через схему И 31 соединен с датчиками 27 и 26 питателя и дозатора, выход блока буферной памяти соединен с устройством 21 программы, вход блока 34 управления исполнительным органом конвейера через схему 35 соединен с датчиками 28 кормушки 29 животного и 30 впускной калитки, а вход блока 33 управления исполнительным органом впускной калитки соединен с регистром сдвига 32, входы которого соединены с датчиком 28 кормушки и датчиком 27 дозатора, соединенного с блоками 23 и 25 управления исполнительными органами питателя и дозатора.
Устройство работает следующим образом.
С пуском конвейера кормушки 5-15 приходят в движение.
Если к началу движения конвейера животное еще не прошло блок распозн вания 19, то на дозатор 1 не поступает управляющих команд и подача корм питателем 2 не производится. В случае при прохождении кормушки 5 под дозатором 1 от датчика 28 кормушки на блок 25 управления исполнительным органом дозатора 1 и на регистр сдвига поступает импульсный сигнал. В регистре 32 при этом в первом разряде записывается О и происходит сдвиг на один разряд. Блок 25 управления исполнительным органом дозатора 1 при этом не срабатывает и дозатор 1 не разгружается, так как для этого необходимо, чтобы от датчика 27 одновременно пришел сигнал об окончании отработки дозы корма. Кормушки с кормом в этом случае не заполняются и движутся пустыми, а впускная калитка 18 закрыта. Как только с блока распознавания
19поступят на вход буферной, памяти
20сигналы распознанных номеров животных, производится их запись в соответствующую ячейку памяти. Номер вошедшего животного в скотопроход первым записывается в первую ячейку памяти, вторым - во вторую ячейку памяти и т.д.
Так как подача корма к дозатору еще не началась, с датчика питателя
26и датчика 27 подаются сигналы на схему совпадения 35 и от нее подается сигнал .(готовности дозатора) на второй вход буферной памяти 20. При этом содержимое первой ячейки буферной памяти выводится, а информация
о номере передается в программное устройство 21. После вывода информации из блока 20 запись буферной па.мяти сдвигается на одну ячейку, так что в первой ячейке оказывается информации о номере следующего животного, а последняя ячейка,из числа заполненных освобождается.
При поступлении номера животного в программное устройство 21 из памяти считывается доза выдачи корма, соответствующая для данного животного, и происходит переключение контактов коммутатора 22. По сигналам от коммутатора происходит настройка задатчика веса дозы 24, включается исполнительный орган 3 питателя и после отработки дозы корма он выдается в проходящую кормушку конвейера, при этом прекращается подача сигнала датчиком 26 питателя, что вызывает прекращение .подачи сигнала схемой И 31 в буферную память. Датчик
27по окончании отработки дозы корма отключает исполнительный орган 3 питателя, дает разрешение на разгрузку дозы корма и на запись единицы в первый разряд регистра 32.
Во время движения кормушки под дозатором от датчика 28 кормушки подается сигнал на включение исполнительного органа дозатора 1 на разгрузку корма в кормушки и сдвиг записи в регистре 32 на один разряд.
После разгрузки дозатора 1 от датчика 27 дозатора снова подается сигнал на схему И 31, а так как исполнительный механизм питателя включен, одновременно от датчика 26 питателя на схему И 31 поступает сигнал совпадения. На буферную память снова поступает сигнал о готовности дозатора и цикл дозирования и выдачи корма в следующую кормушку повторяется аналогично выше описанному. По мере движения и заполнения кор мушек кормом животное, прошедшее опознование.,блоком 19, в установленной очереди подходят к впускной калитке 18.. Команда на открывание впускной калитки 18 формируется и подается регистром 32, Регистр сдвига 32 имеет определенное количество разрядов, равное количеству кормушек на участке конвейера от точки А до точки В. Для на шего примера регистр сдвига имеет шесть разрядов. При каждом поступлении сигнала от датчика дозатора 27 в первый разряд регистра 32 записывается единица, а при каждом поступлении сигнала от датчика кормушки 28 происходит сдвиг записи на один разряд. Последний, в нашем случае шестой, разряд имеет выход, соединенный с блоком 33 управ ления исполнительным органом впускной калитки, и когда в последнем раз ряде регистра сдвига 32 запишется единица, на устройство 33 подается с.игнал и впускная калитка 18 открывается. Таким образом, если к моменту подхода кормушки 15 под дозатор 1 будет отработана доза корма для пер вого распознанного животного, т.о в первый разряд регистра 32 записывается единица, а в момент воздействи кормушки на датчик 28 происходит сдвиг единицы во второй разряд. По мере движения заполне нной кормушки 15 к точке В в регистре происходит пять сдвигов и записанная единица окажется в последнем (шестом) разря де. В этом случае на блок управлени исполнительным органом впускной калитки -33 поступает команда, калитка 18 открывается и первое животное за нимает свое место, у предназначенной для него кормушки. По достижении кормушкой с животным датчика 28 подается сигнал на устройство 33, и впускная калитка 18 закрывается, преграждая путь следующему животном Если при открытой впускной калит ке животное по каким-либо причинам не успеет .подойти к кормушке, то от датчика 28 кормушки, от датчика 30 впускной калитки и от датчика 29 жи вотного через схему 35 на блок 34 уп равления исполнительным органом кон вейера приходит .сигнал и он останав ливается, а предназначенная кормушк с кормом для данного животного зани мает положение против датчика 28 около калитки 18. При подходе животного в кормушке с кормом датчик 29 срабатывает и сигнсшом схемы И 35 включается испо нительный орган конвейера и он начи нает движение. Управление выдачей корма и впуском следующих животных осуществляет аналогично выше изложенному до прекращения поступления животных записанных в буферной памяти 20. Животные поедают.корм в процессе движения, следуя по маршруту движения кормушек..В конце маршрута скотопровод имеет поворот, где кормушки поднимаются на высоту достаточную для прохода животного под кормушкой. Процесс кормления заканчивается и животное удаляется с кормового конвейера. Устройство осуществляет автоматическое изменение через коммутатор 22 дозы корма в соответствии с заданием для данного животного. Таким образом, устройство обеспечивает повышение эффективности расхода корма. Формула изобретения Устройство для автоматической раздачи корма, содержащее блок программы, связанный чррез коммутатор с блоком управления, исполнительннлм органом питателя.и задатчиком дозы корма, датчик кормушки,связанный с блоками управления исполнительными, органами дозатора и впускной калитки, блок распознавания животных, датчик животного и блок управления .исполнительным органом конвейера, о т л и ч аю щ е е с я тем, что, с целью повышения эффективности расхода корма путем согласования впуска животных к кормушкам с работой, дозатора, оно снабжено блоком буферной памяти с двумя входами, регистром сдвига, схемами И, датчиком питателя и датчиками дозатора и впускной калитки, причем первый вход блока буферной памяти соединен с.блоком распознавания живот°ного, а второй через первую схему И соединен с датчиками питателя и дозатора, выход блока буферной памяти соединен с блоком программы, вход блока управления исполнительным органом конвейера через вторую схему И соединен с датчиками кормушки животного и впускной калитки, а вход блока управления исполнительным органом впускной калитки соединен с регистромсдвига, входы регистра сдвига соединены с датчиком кормушки и датчиком дозатора, который соединен с блоками управления исполнительными органами питателя и дозатора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 727184, кл. А 01 К 5/02,1980. 2.Авторское свидетельство СССР № 793515, кл. А 01 К 5/02 1980 (прототип) .
