Фиг. 3
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе.
Цель изобретения - повышение производительности.
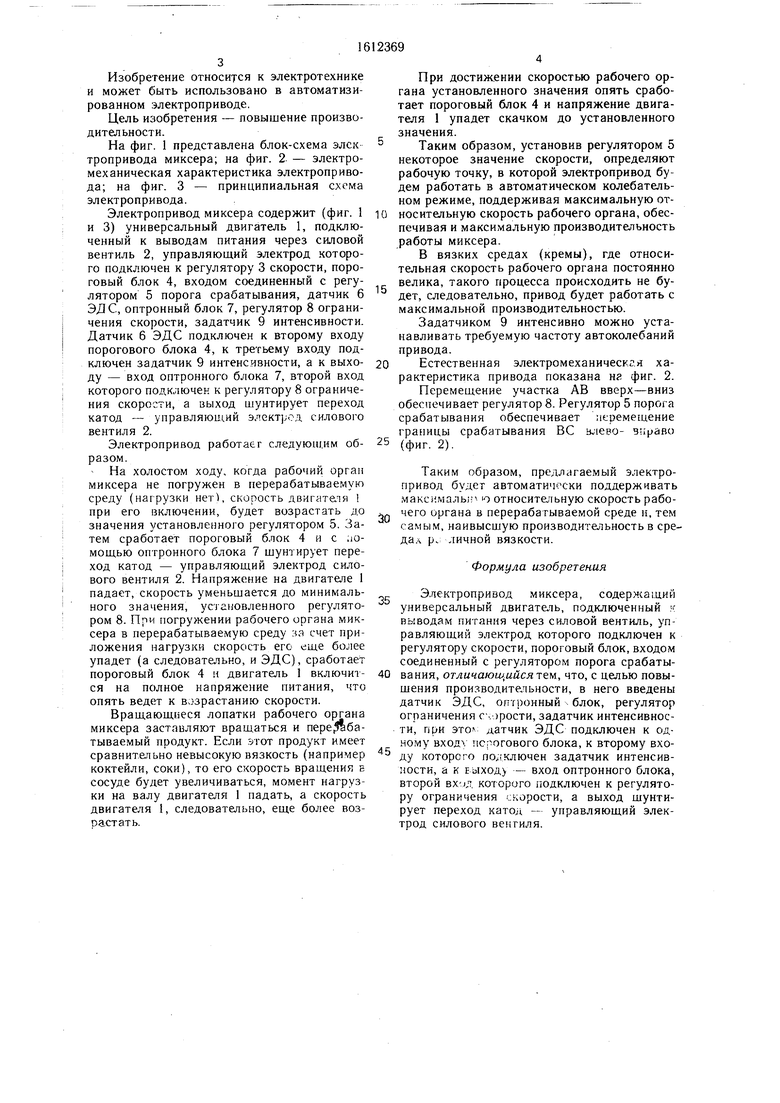
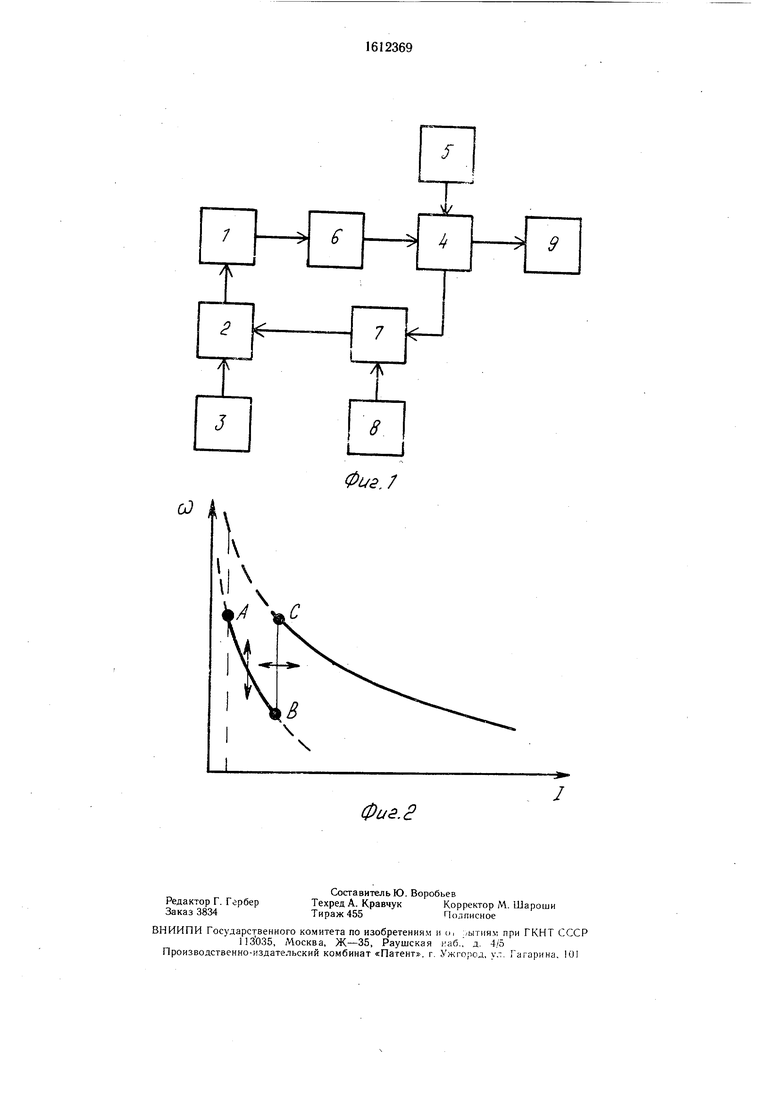
На фиг. 1 представлена блок-схема элск тропривода миксера; на фиг. 2 - электромеханическая характеристика электропривода; на фиг. 3 - принципиальная схема электропривода.
Электропривод миксера содержит (фиг. 1 и 3) универсальный двигатель 1, подключенный к выводам питания через силовой вентиль 2, управляющий электрод которого подключен к регулятору 3 скорости, пороговый блок 4, входом соединенный с регулятором 5 порога срабатывания, датчик 6 ЭЛС, оптронный блок 7, регулятор 8 ограничения скорости, задатчик 9 интенсивности. Датчик 6 ЭДС подключен к второму входу порогового блока 4, к третьему входу подключен задатчик 9 интенсивности, а к выходу - вход оптронного блока 7, второй вход которого подключен к регулятору 8 ограничения скорости, а выход шунтирует переход катод - управляющий электрод силового вентиля 2.
Электропривод работает следующим образом.
На холостом ходу, когда рабочий орган миксера не погружен в перерабатываемую среду (нагрузки нет), скорость двигатепя 1 при его включении, будет возрастать до значения установленного регулятором 5. Затем сработает пороговый блок 4 и с ;io- мощью оптронного блока 7 шунтирует переход катод - управляющий электрод силового вентиля 2. Напряжение на двигателе 1 падает, скорость уменьшается до минимального значения, ус 1 г1ювленного регулятором 8. При погружении рабочего органа миксера в перерабатываемую среду ля счет приложения нагрузки скорость его еще более упадет (а следовательно, и ЭДС), сработает пороговый блок 4 н двигатель 1 включи - ся на полное напряжение питания, что опять ведет к возрастанию скорости.
Вращающиеся лопатки рабочего органа миксера заставляют вращаться и пере; 1ба- тываемый продукт. Если этот продукт имеет сравнительно невысокую вязкость (например коктейли, соки), то его скорость вращения Е сосуде будет увеличиваться, момент нагрузки на валу двигателя 1 падать, а скорость двигателя 1, следовательно, еще более воз- оастать.
При достижении скоростью рабочего органа установленного значения опять сработает пороговый блок 4 и напряжение двигателя 1 упадет скачком до установленного значения.
Таким образом, установив регулятором 5
некоторое значение скорости, определяют рабочую точку, в которой электропривод будем работать в автоматическом колебательном режиме, поддерживая максимальную относительную скорость рабочего органа, обеспечивая и максимальную производительность работы миксера.
В вязких средах (кремы), где относительная скорость рабочего органа постоянно велика, такого процесса происходить не будет, следовательно, привод будет работать с максимальной производительностью.
Задатчиком 9 интенсивно можно устанавливать требуемую частоту автоколебаний привода.
Естественная электромеханическая характеристика привода показана на фиг. 2. Перемещение участка АВ вверх-вниз обеспечивает регулятор 8. Регулятор 5 порога срабатывания обеспечивает перемещение границы срабатывания ВС н /чево- вправо
(фиг. 2).
Таким образом, предлагаемый электропривод будет автоматически поддерживать максималь)-: ю относительную скорость рабо- чего органа в перерабатываемой среде н, тем самым, наивысшую производительность в сре- да.л р. личной вязкости.
Формула изобретения
Электропривод миксера, содержащий
универсальный двигате«1ь, подключенный к выводам питания через силовой вентиль, управляющий электрод которого подключен к регулятору скорости, пороговый блок, входом соединенный с регулятором порога срабатывания, отличаюш.ийсяте л, что, с целью повышения производительности, в него введены датчик ЭДС, оптронный блок, регулятор ограничения с-.; )рости, задатчик интенсивности, при ЭТО - датчик ЭДС подключен к одному входу псрогового блока, к второму вхо- ду которого пол. ключен задатчик интенсивности, а к Еыход) - вход оптронного блока, второй вх -)Д которого подключен к регулятору ограничения скорости, а выход щунти- рует переход катод - управляющий электрод силового вентиля.
/
S
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Электропривод | 1985 |
|
SU1307522A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СТАНКА ДЛЯ РЕЗКИ И ЗАЧИСТКИ ПРОВОДА | 1990 |
|
SU1792223A1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
| Электропривод с раздельным управлением | 1989 |
|
SU1817220A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе в бытовой технике, а также в ручном электроинструменте, где требуется ограничение скорости холостого хода. Целью изобретения является повышение производительности работы миксера. Электропривод содержит универсальный двигатель 1, пороговый блок 4, силовой вентиль 2, регулятор 3 скорости, оптронный блок, позволяющий регулировать величину ограничения скорости, датчик 6 ЭДС вращения, задатчик 9 интенсивности колебаний скорости рабочего органа. За счет обеспечения автоматического поддержания максимальной относительной скорости рабочего органа в средах различной вязкости повышается производительность электропривода миксера. 3 ил.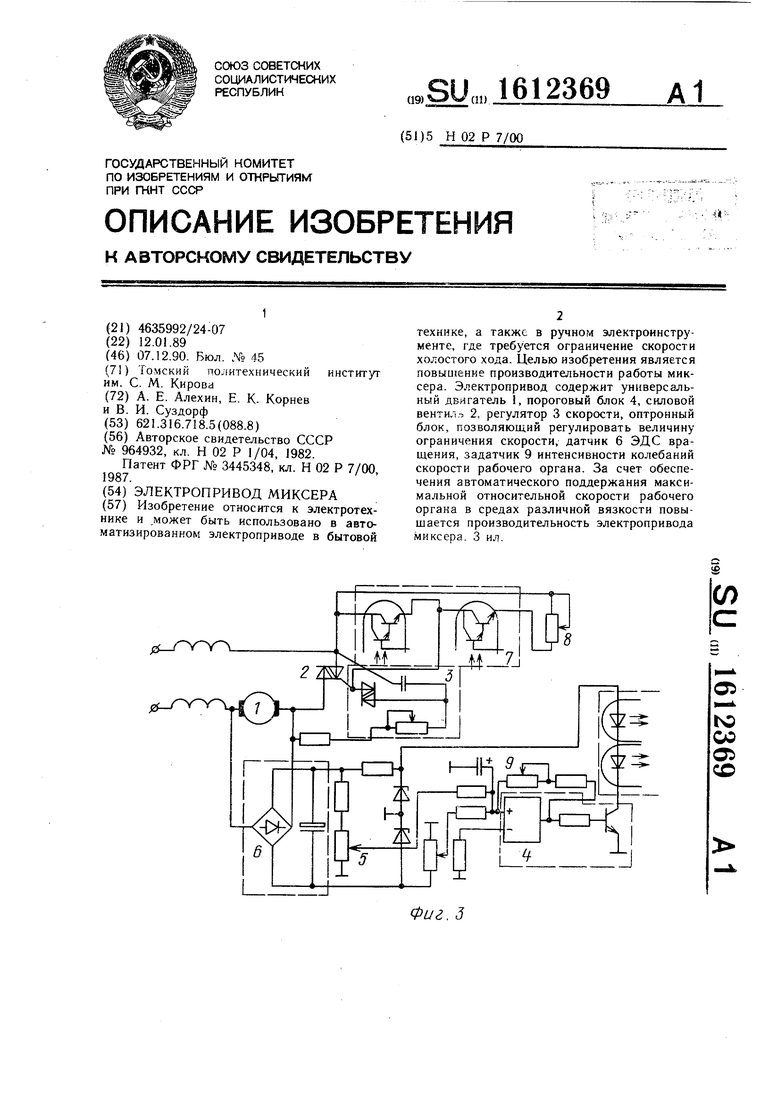
2
0USj
cJ
| Устройство для регулирования скорости электродвигателя | 1981 |
|
SU964932A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
