I-..J
17 9иг.2




Изобретение относится к способам управления автомобилем в режиме торможения. Цель изобретения - обеспечение наиболее предпочтительной скорости движения без использования колесныхтормозов. Управление тормозом-замедлителем 3 осуществляется по сигналам датчика 16 положения педали акселератора, датчика 15 положения тормозной педали и датчика 14 угловой скорости одного из элементов трансмиссии. Сигналы от датчиков 14 - 16 подаются на электронный блок 17, управляющий электрогидравлическими клапанами 4. 3 ил.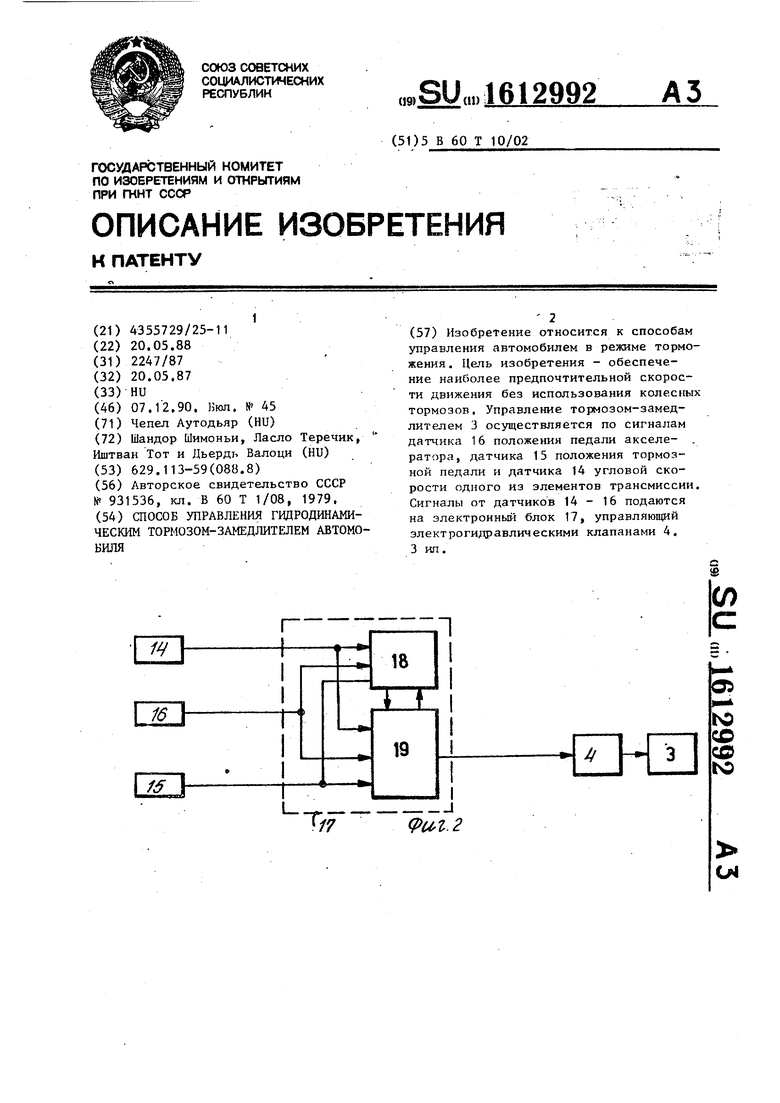
см
Изобретение относится к способам управле)1ня автомобилем в ремшме торможения ,
Цель изобретения - обеспечение наиболее прадпочтит ельной скорости движения без использования колеснык тормозов.
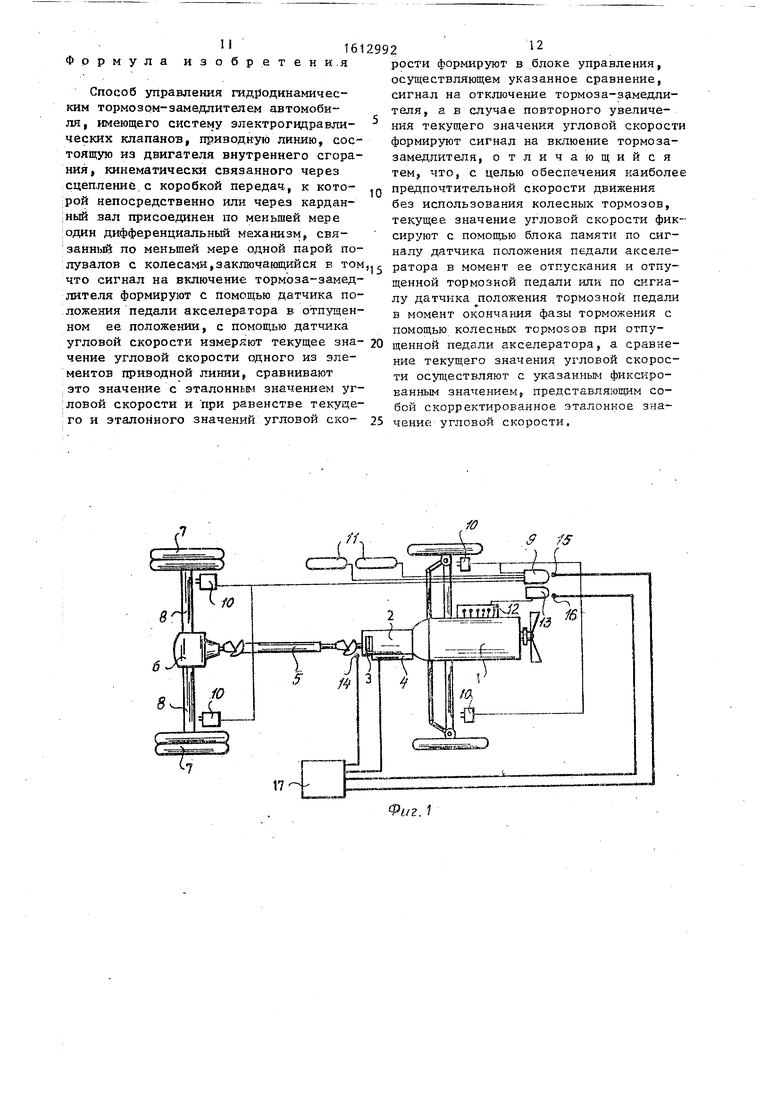
На фиг, 1 показана функциональная схема автомобиля, на котором ствляется способ управлекия; на фиг. 2 - блок-схема системы управле- :НИН тормозом-замедлнтэлвм ка фиг.З - ;блок-схема злектронного блока управ- ления.
Автомобиль, в частности автобус i, (фиг. 1), приводится двигателем 1, представляющим собой шестицилиндровый дизельный двигатель внзгтреннего сгорания. К двигателю 1 присодеинена автоматическая коробка 2 передач содержащая гидродинамический преобразо- . ватель момента и ф-рикцконное сцепле- ; ние. Кроме того, в автоматической ко- 1робке 2 передач встроены совместно гидродинамический тормоз-замедлитешь 3 с злектрогидравлическ1-1ми клапанами :4, а также с пропорциональным клапаном, регулирующим гидродинамический
тормоз-замедлитель 8,...
Выходной вал автоматической коробки 2 передач с помощью карданного заа 5 соединен с дифференциальным механизмом 6 заднего моста., передающий крутящий момент на колеса 7 через полувалы 8, Описанные узлы образуют приводную линию ав юбуса.
Изобретение является прие шемым также для применения в легковых автомобилях. Однако у части легковых авто- мобиле ;, а именно у автомобилей с пе- приводом и находящимся сзади двигателем, коробка передач и дифференциальный механизм выполнены в виде одного узла, поэтому в их приводной линии карданный вал отс;утствует„
Двухконтурная система торможения (фиг. 1) состоит из клапана торможения, управляемого педалью 9 тормоза тормозных цилиндров Юпресиверов 11 и соединительных трубопроводов.
Снабжение двигателя 1 топливом . обеспечивается через подводящую систему 12 (фиг, 1)з которая может регулироваться педалью 13 акселератора. Для управления гидродинамическим тор- мозом-замедлителем 3 необходима основная информация; производимая соответствующими сигнальньвли датчиками,
Одной из составляющих основной информации является мгновенная скорость автомобиля, соответственно ее .изменение. Если автомобиль снабжен тормоз- ной системой с антиблокировкой, то
сигнал расположенного у колес сигнального датчика угловой скорости - соответственно его средняя величина, соответствует цели изобретения В автомобилях, не снабженных тормозной системой с антиблокировкой, задача также может быть решена более простым образом, так как каждая коробка передач
имеет выход для спидометра,с которого может быть получен этот сигнал. В соответствии с этим сигнальный датчик 14 угловой скорости встроен у приводного вала автоматической коробки 2
передач
Следувщкми составляющими основной информации являются выражающие желание водителя- автомобиля во взаимосвязи со скоростью автомобиля положение
пе;;али 13 и положение педали 9 тормоза. Для этого у педали 9 тормоза встроен сигнальньм датчик 15 положения педали тормоза, сигнализируюищй о различных положениях педали TODMO
О
5
0
за, а у педали 13 встроен сигнальный датчик 16 исходного положения педали газа.
Все три сигнальных датчика (фиг. 2) подключены к входу электронного блока 17, Последний состоит из блока 18 па- .мяти и из соединенного с ним блока 19 управления. Сигяельиые датчики, подключены к блоку 8 памяти и также к блоку 19 управления„ Выход последнего, который одновременно является выходом электронного блока 17t соединен с соот- ветствую дкми электромагнитами клапанов 4,
Электронньм блок 17 может выполняться в различных вариантах.
Электронный блок 17 .(фиг. 3) состоит нз MHKponpojieccopa 205 программируемого блока 21 входа-вь:хода, программируемых трехканальных блоков 22 и 23 рагулирования счета и времени, блока 24 и блока ROM 26, тактового генератора 265 блока 27 повторного запуска, блока 28 декод фовакия и циф- роаналогового бтгока 29,
Точки подключения адресов, данных и управления, несу1цке одинаковую функцию, гф кропроцессора 20, программируемого блока 21 вхада-выхода, про- .г рам : ируемых трехканалькых блоков 22
и 23 регулирования счета и времени, блока RAM 24, блока ROM 25 и блока 28 декодирования соединены друг с другом.
Блок 27 повторного запуска соединен с точкой Повторньш запуск микропроцессора 28, программируемого блока 21 входа-выхода, программируемых трехка- нальных блоков 22 и 23 регулирования счета и времени.
Выходы блока 28 декодирования по отдельности соединены с входами Выбор чипа (chip select) программируе- мого блока 21 входа-выхода, программируемых трехканальных блоков 22 и 23 регулирования счета и времени, блока ВАМ 24 и блока ROM 25,
Тактовый генератор 26 соединен с тактовым входом микропроцессора 20 и трехканальным блоком 23 регулирования счета и времени. С выходом программируемого блока 21 входа-выхода соединены входы цифроаналогового блока 29.
Функционально разделенные (фиг, 2 две части электронного блока 17, т.е. действительные частя конструкции блока 18 памяти, блока 19 управления эле10
5
20
25
ющего гидродинамический тормоз-замед литель 3, регулируется далее на тако напряжение, которое регулирует пропо циональньш клапан в диапазоне давление 0-1 Mlla. ,
Способ осуществляют следующим образом.
До тех пор, пока автобус едет так что водитель нажимает на педаль гидродинамический тормоз-замедлитель 3 не функционирует. Хотя сигнальный датчик 14 угловой скорости сигнализи рует непрерывно о скорости автобуса, однако электронньй блок 17 не обраба тывает сигнал о
Если водитель возвращает педаль 1 в ее исходное положение, блок 18 памяти, соответствующий блоку RAM 24, под воздействием сигнала исходного г за сигнального датчика 16 исходного положения педали 13 запоминает ту ве личину скорости, которую сигнальный датчик 14 угловой скорости при возврате педали 13 в ее исходное положе ние направляет в качестве сигнала угловой скорости.
Одновременно с сигналом исходного газа сиг)ального датчика 16 исходног
ктропного блока 17 с точки зрения сое-зо положения педали блок 19 управления
подает команду пня прик.едения в дейс вие гидродинамического тормоза-замед лителя 3, С этого моме.нта в блоке 19 управления яначс ние скорости, запомненное в блоке 18 памяти,непрерывно сравнивается с текущим значением ско рости, 1 епрерывно напраиляемым далее в качестве сигнала углопо скорости ,1м датчиком 14- угловой скорости „ Однако лишь под воздействием сигнала исходного газа сигнального датчика 16 исходного положения педал 13 блок 19 управления еще не подает на электромагнитную систему клапанов управляющий сигнал..
35
40
динений не перекрывают точно одна другую. Электронный блок 17 управления может.вьшолняться более просто со специализированными на отдельные задачи электронными элементами, далее электронный блок 17 управления также выполняет другие задачи, не связанные с изобретением (управление с антиблокировкой гидродинамическим тормозом-замедлителем, управление автоматической коробкой передач).
Злектронньй блок 17 через вход программируемого трехканального блока 22 регулирования счета и времени соединен с сигнальным датчиком 16 исходно- -с го положения педали акселератора и через входы программируемого трехканального блока 23 регулирования счета и времени соединен с сигнальным датчиком 14 положения педали тормоза и нальным датчиком 15 угловой скорости.
Выход блока 29 одновременно является выходом электронного блока 17 к электрогидравлическому .клапану 4 управления гидродинамическим тормозомподает команду пня прик.едения в действие гидродинамического тормоза-замедлителя 3, С этого моме.нта в блоке 19 управления яначс ние скорости, запомненное в блоке 18 памяти,непрерывно сравнивается с текущим значением скорости, 1 епрерывно напраиляемым далее в качестве сигнала углопо скорости ,1м датчиком 14- угловой скорости „ Однако лишь под воздействием сигнала исходного газа сигнального датчика 16 исходного положения педали 13 блок 19 управления еще не подает на электромагнитную систему клапанов управляющий сигнал..
Когда автобус едет по уклону, он Несмотря на сброс газа может ускоряться Если это происходит, величина сигнала угловой скорости, направляемого сигнальным датчиком 14 угловой скорости, т.е текущее значение скорости, становится больше, чем значение запомненной величины скорости,
Если возникает такая ситуация, блок управления подает клапанам. 4 упзамедлителем. Блок 29 производит сиг- равляющий сигнал, пропорциональный нал величиной О-Т О В, который за счет различию, и пропорциональньй клапан
п.ривод1Ст в действие падродинамический тормоз-замедлитель Зв требующейся для
собственной электроники управления пропорционального клапана, регулиру
ющего гидродинамический тормоз-замедлитель 3, регулируется далее на такое напряжение, которое регулирует пропор- циональньш клапан в диапазоне давление 0-1 Mlla. ,
Способ осуществляют следующим образом.
До тех пор, пока автобус едет так, что водитель нажимает на педаль гидродинамический тормоз-замедлитель 3 не функционирует. Хотя сигнальный датчик 14 угловой скорости сигнализирует непрерывно о скорости автобуса, однако электронньй блок 17 не обрабатывает сигнал о
Если водитель возвращает педаль 13 в ее исходное положение, блок 18 памяти, соответствующий блоку RAM 24, под воздействием сигнала исходного газа сигнального датчика 16 исходного положения педали 13 запоминает ту величину скорости, которую сигнальный датчик 14 угловой скорости при возврате педали 13 в ее исходное положение направляет в качестве сигнала : угловой скорости.
Одновременно с сигналом исходного газа сиг)ального датчика 16 исходного
о положения педали блок 19 управления
5
0
с Q
подает команду пня прик.едения в действие гидродинамического тормоза-замедлителя 3, С этого моме.нта в блоке 19 управления яначс ние скорости, запомненное в блоке 18 памяти,непрерывно сравнивается с текущим значением скорости, 1 епрерывно напраиляемым далее в качестве сигнала углопо скорости ,1м датчиком 14- угловой скорости „ Однако лишь под воздействием сигнала исходного газа сигнального датчика 16 исходного положения педали 13 блок 19 управления еще не подает на электромагнитную систему клапанов управляющий сигнал..
Когда автобус едет по уклону, он Несмотря на сброс газа может ускоряться Если это происходит, величина сигнала угловой скорости, направляемого сигнальным датчиком 14 угловой скорости, т.е текущее значение скорости, становится больше, чем значение запомненной величины скорости,
Если возникает такая ситуация, блок управления подает клапанам. 4 уп20
замедления до запомненного значения скорости степени, Это автоматическое регулирование продолжается до тех пор, пока блок 19 управления на основании сигнала углевой скорости сигнального датчика 14 угловой скорости может от слеживать то, что автобус без приведения в действие гидродинамического тормоза-замедлителя 3 ускорялся бы, еле- Q довательно, регулирование осуществляется с поддержанием скорости,
В -том случае, если водитель рассматривает ве.тшчину скоростиJ,. запом- ,«: ненную в соответствии со сказанньЕ, в качестве слишком высокой, он замедляет автобус с помощью нажатия педали 9 тормоза до скорости, рассматриваемой им в качестве полностью безопасной. Гидродинамический тормоз-замедлитель 3 принимает участие также в этом.
Сигнальный датчик 1.5 положени я педали тормоза подает на блок 19 уп- 25 равления пропорциональный положению педали 9 тормоза сигнал торможения и блок 19 управления подает на пропор- циональньй клапан клапанов 4 пропорциональный этому сигналу управляющий зо сигнал. Таким образом, гидродинамический тормоз-замедлит зль 3 оказывает тормозное воздействие,пропорщюналь ноё произведенному тормозньмк цилиндрами 10 усилию торможения ,„
Одновременно с этим сигнал торможения стирает значение скорости, запомненное в блоке 18 памяти,.
После Toroj как автобус в необхо- 0 ДИМОЙ степени замедлил свое двшкение, водитель автобуса отпускает педаль 9 тормоза и сигнал тормозсания гасится,
Если педаль 13 и остается в ее исходном положении, бхюк 18 памяти под дг
действием сигнала сигнального датчика 16 исходного положения педали 13 запоминает теперь сигнал угловой скорости- от сигнального датчика 14 угловой скорости5 соответствующий скорое- ,-. ти, измеряемой в момент отпускания педали тормоза Далее блок 19 управления сравнивает сигнал угловой скорости, соответствующий мгновенной .скорости, с упомянутым запомненным ;-„ сигналом угловой скорости, Поддерж - i вающее скорость регулирование гидродинамического тормоза-замедлителя 3 совпадает с описанным
35
0
Q
«:
5 о
0
г
.
5
Готовность к шравлению блока 19 управления может предупреждаться
двумя Щ ТЯМИ,.
Когда водитель начинает разгонять автобус,, он нажимает на педаль 13, За счет этого гасится сигнал исходного газа сигнального датчика 16 исходного положения педали 13, Вследствие этого в блоке 18 памяти стирается зало-- женный сигнал угловой .скорости и также устраняется управляющий сигнал блока 19 управления, подводимый к клапанам 4 о
Если автобус продолжительное время замедляет ход (ниже запомненной величины скорости), это замедле}-ше не может быть устранено блоком 19 управления лишь с помощью полного выключения гидродинамического, тормоз а-замедлителя Зо В этом случае запомненный сигнал стирается в блоке 18 памяти за счет блока 19 управления
Если не используется сигнальный датчик положения педали тормоза, предлагаемый способ осуществляют следующим образом.
Блок 18 памяти запоминает текущее значение угловой скорости сигнального датчика 14 угловой скорости под .воздействием сигнала исходного газа сигнального датчика 16 исходного положения педали 13 и включение и регу- .лирование гидродинамического тормоза- замедлителя 3 с поддержанием скорости . осуп ествляется блоком 1 9 управления аналогично опкс анному„
Когда водитель автобуса хочет достигнуть поддержания скорости меньшей, чем запомненное значение скорости, он замедляет автобус с помощью педалк 9 тормоза до этой скорости, затем он перемещает педаль 13 акселератора и вновь возвращает ее назад. Здесь запомненный в блоке 15памяти сигнал
угловой скорости с помощью движения педали 13 стирается, затем в блоке, 18 памяти запом.инается соответствующий сигнал угловой скорости, возникающий с помощью установки педали 13 в основное положение за счет замедления. Далее блок 19 управления сравнивает сигнал угловой скорости, соответствующий мгновенной скорости, с описанным запомненным сигналом угло- вой скорости.
Готовность к управлению блока 19 управления и блока 18 памяти может гаситься описанным образомо
9t6l2992
Когда в системе не предусмотрено сиг-Дальнего датчика исходного положения педали 13, способ осуществляет следующим образом,.
Водитель подает команду на запоми- нание сигнала угловой скорости сигнального датчика 14 угловой скорости с помощью мгновенного нажатия педали 9 тормоза. Сигнальный датчик 15 положения педали тормоза производит сигнал для запоминания сигнала угловой скорости к блоку 18 памяти, соответствующей мгновенной угловой скорости, и
10
Другой способ прекращения готовнос ти к управлению блока 19. управления и блока 18 памяти состоит в автоматичес ком выключении по причине уже описанного чрезмерного замедления. Вновь другим методом является то, что когда водитель хочет разогнать автобус, сис тема может включаться с помощью мгновенного нажатия педали 9 тормоза.
Традиционная система торможения с использованием решения согласно изобретению при регулировании с поддержанием скорости может быть разгруженной
для блока 19 управления. Регулирование.г ДО тех пор, пока одного гидродинамиосуществляют аналогично описанному. Для езды с поддержанием скорости при малой скорости водитель замедляет автобус с помощью соответствующего нажатия педали 9 тормоза уже описанным образом и тем самым одновременно устраняет регулирование гидродинамического тормоза-замедлителя 3 с поддержанием скорости. Вслед за тем с помощью отпускания и повторного нажатия педали 9 тормоза известньш процесс начинается вновь, т.е. на ное нажатие педали 9 тормоза сигнДль- ньй датчик 15 положения педали тормоза подает блоку 18 памяти сигнал для запоминания сигнала угловой скорости, соответствующей мгновенной скорости, и блоку 19 управления для регулирования гидродинамического тормоза-замедлителя 3 с поддержанием скорости. Регулирование осуществляют аналогично описанному о
Для езды с поддержанием скорости при более низкой скорости водитель замедляет автобус с помощью соответствующего нажатия педали 9 тормоза уже описанным образом и тем самым одновременно устраняет регулирование гидродинамического тормоза-замедлителя .3 с поддержанием скорости, С помощью отпускания и повторного нажатия педали 9 тормоза процесс повторяют вновь, . под действием повторного нажатия педали 9 тормоза сигнальньш датчик 15 положения педали тормоза подает блоку 18 памяти сигнал для запоминания сигнала угловой скорости, соответствующей мгновенной скорости, и блоку 19 управления для регулирования гидродинамического тормоза-замедлителя 3 с поддержанием скорости. Вслед за тем педаль 9 тормоза может быть вновь отпущена.
20
30
ческого тормоза-замедлителя достаточно для эффективного торможения,
Гндродина: ;ические тормоза-замедлители имеют то отрицательное свойство, что они медленно реагируют на управляющие сигналы. Однако при регулировании с поддержанием скорости требуется, чтобы они реагировали тотчас 25 же и чувствительно. По этой причине программа блока 14 управления составлена так, что используется пропорциот нальное регулирование с упреждением. Это означает, что управляющий сигнал состоит из двух частейо Одна часть пропорциональна различию между сигналом угловой скорости, запомненным в блоке 18 памяти, и сигналом угловой скорости, направляемым далее сигнальным датчиком 14 угловой скорости, тог да как другая часть является первой производной первой части, наложенной
на первую часть о I
С помощью пропорционального регули рования с упреждением достигается то, что пропорциональный клапан, регулиру ющий гидродинамический тормоз-замедлитель 3, под воздействием управляющего сигнала блока 19 управления быстро открывается и ступенчатым образом устанавливается на линейное в основном регулирование.
I
Управление также снабжено выключающим органом (не показан). Блок управления выполняет также другие задачи и его ручное выключение выполнено во взаимосвязи с этими задачами. В данном случае это не имеет значения, так как автоматическое выключение обеспечивается несколькими способами. Однако в случае блоков управления, выполненных другим образом, это также должно быть обеспечено„
10
45
50
55
10
Другой способ прекращения готовности к управлению блока 19. управления и блока 18 памяти состоит в автоматическом выключении по причине уже описанного чрезмерного замедления. Вновь другим методом является то, что когда водитель хочет разогнать автобус, система может включаться с помощью мгновенного нажатия педали 9 тормоза.
Традиционная система торможения с использованием решения согласно изобретению при регулировании с поддержанием скорости может быть разгруженной
0
0
ческого тормоза-замедлителя достаточно для эффективного торможения,
Гндродина: ;ические тормоза-замедлители имеют то отрицательное свойство, что они медленно реагируют на управляющие сигналы. Однако при регулировании с поддержанием скорости требуется, чтобы они реагировали тотчас 5 же и чувствительно. По этой причине программа блока 14 управления составлена так, что используется пропорциот нальное регулирование с упреждением. Это означает, что управляющий сигнал состоит из двух частейо Одна часть пропорциональна различию между сигналом угловой скорости, запомненным в блоке 18 памяти, и сигналом угловой скорости, направляемым далее сигнальным датчиком 14 угловой скорости, тогда как другая часть является первой производной первой части, наложенной
на первую часть о I
С помощью пропорционального регулирования с упреждением достигается то, что пропорциональный клапан, регулирующий гидродинамический тормоз-замедлитель 3, под воздействием управляющего сигнала блока 19 управления быстро открывается и ступенчатым образом устанавливается на линейное в основном регулирование.
I
Управление также снабжено выключающим органом (не показан). Блок управления выполняет также другие задачи и его ручное выключение выполнено во взаимосвязи с этими задачами. В данном случае это не имеет значения, так как автоматическое выключение обеспечивается несколькими способами. Однако в случае блоков управления, выполненных другим образом, это также должно быть обеспечено„
10
5
0
5
ормула
II и 3 о б р
1612992
е т е н и . я
ро ос си те ни за те Q пр бе те си на
Способ управления гидродинамическим тормозом-замедлителем автомобиля , имеющего систему электрогидравлических клапанов, приводную линию, состоящую из двигателя внутреннего сгорания, кинематически связанного через
рости формируют в блоке управления, осуществляющем указанное сравнение, сигнал на отключение тормоза-замедлителя, а в случае повторного увеличения текущего значения угловой скорости формируют сигнал на вюлюение тормоза- замедлителя, отличающийся тем, что, с целью обеспечения наиболее Q предпочтительной скорости движения без использования колесных тормозов, текущее значение угловой скорости фиксируют с помощью блока памяти по сигналу датчика положения педали акселесцепление с коробкой передач, к кото- :рой непосредственно или через кардан- ;НЫЙ вал присоединен по меньшей мере один дифференциальный механизм, связанный по меньшей мере одной парой полувалов с колесами,заключающийся в TOM,J ратора в момент ее отпускания и отпу- что сигнал на включение тормоза-замед- щенной тормозной педали или по сигна- лителя формируют с помощью датчика по- jjy датчика положения тормозной педали ложения педали акселератора в отпущенном ее положении, с помощью датчика угловой скорости измеряют текущее зна- 20 ценной педали акселератора, а сравне- чение угловой скорости одного из эле- - текущего значения угловой скорос- ментов приводной линии, сравнивают осуществляют с указанным фикскро- это значение с эталонньм значением уг- ванным значениемг представляющим со- ;ловой скорости и при равенстве текуще- g скорректированное эталонное зна- го и эталонного значений угловой ско- 25 чение угловой скорости.
в момент окончания фазы торможения с помощью колесных тормозов при отпу12
рости формируют в блоке управления, осуществляющем указанное сравнение, сигнал на отключение тормоза-замедлителя, а в случае повторного увеличения текущего значения угловой скорости формируют сигнал на вюлюение тормоза- замедлителя, отличающийся тем, что, с целью обеспечения наиболее предпочтительной скорости движения без использования колесных тормозов, текущее значение угловой скорости фиксируют с помощью блока памяти по сигналу датчика положения педали акселератора в момент ее отпускания и отпу- щенной тормозной педали или по сигна- jjy датчика положения тормозной педали ценной педали акселератора, а сравне- - текущего значения угловой скорос- осуществляют с указанным фикскро- ванным значениемг представляющим со- g скорректированное эталонное зна- чение угловой скорости.
ратора в момент ее отпускания и отпу- щенной тормозной педали или по сигна- jjy датчика положения тормозной педали ценной педали акселератора, а сравне- - текущего значения угловой скорос- осуществляют с указанным фикскро- ванным значениемг представляющим со- g скорректированное эталонное зна- чение угловой скорости.
в момент окончания фазы торможения с помощью колесных тормозов при отпуУ /5
t
Фг/г.
(г.д
п
J
| Тормозное устройство транспортного средства | 1979 |
|
SU931536A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
