Изобретение относится к вакуумной технике, а более конкретно - к устройствам, связанным с передачей движения в вакуумный объем, и может быть использовано в различных областях техники для выполнения различных технологических операций: сварки в вакууме, в среде инертных газов, нанесения покрытий, т.е. там, где необходим высокий вакуум до ...10 мм рт.ст.
Известны устройства для передачи движения в вакуумный обьем. Такие устройства имеют привод, ввод движения, с помощью которого осуществляется передача от при- водэ в вакуум необходимого движения исполнительному органу для выполнения полезной работы в условиях вакуума. В литературе описаны конструкции вводов, их классификация, вакуумно-технические характеристики и особенности (Медников М.И, Вводы движения в вакуум . - Машиностроение, 1974).
Известны принципиальные схемы трех типов поступательных сильфонных вводов:
одинарного, гирляндного и телескопического.
Самым простым по конструкции является одинарный ввод с одним сильфоном, допустимый прогиб которого составляет максимальный ход штока сильфонного ввода, максимальный ход которого довольно незначителен и составляет приблизительно от 10 до 15 мм.
В случае необходимости обеспечения в вакууме линейного перемещения, которое больше, но соизмеримо с величиной допустимого прогиба сильфона, например, больше в 2-5 раз, применяют гирляндные или телескопические конструкции поступательных вводов, ход которых равен сумме допустимых прогибов всех сильфонов.
Однако гирляндные вводы (см. там же, рис. 34) имеют значительный осевой габаритный размер, определяемый суммарной длиной сильфонов.
Если по каким-либо условиям осевой размер сильфонного ввода поступательного
2 сл ел
4
Os
движения должен быть ограничен, применяют сложные телескопические конструкции (см. там же, рис. 35), в которых используются разные по габаритным размерам сильфоны, имеющие существенно различную жесткость. В отличие от гирляндных телескопические вводы имеют значительный радиальный размер, сложность конструкции, большую жесткость.
Известен манипулятор, работающий в герметичном объеме, выбранный в качестве прототипа, содержащий крышку вакуумной камеры, на которой смонтированы механизмы приводов сильфонного ввода движений и исполнительный орган, который снабжен тремя шарнирными многократными параллелограммами, связывающими винтовые механизмы приводов сильфонного ввода движения с исполнительным органом. Последний представляет собой радиально- упорный подшипник, внутреннее кольцо которого является предметным столиком и соединено с помощью винтового шарнира винтового толкателя с центральным шарнирным многократным параллелограммом. Наружное кольцо указанного подшипника кинематически связано с двумя диаметрально расположенных сторон с остальными двумя шарнирными многократными параллелограммами.
Недостатком известного манипулятора для работы в герметичном объеме является малая зона обслуживания и ограниченные технологические возможности.
Целью изобретения является расширение технологических возможностей за счет увеличения перемещения в двух направлениях внутри герметичного объема исполнительного органа.
Поставленная цель достигается тем, что манипуляторная камера снабжена дополни- тельным приводом перемещения исполнительного органа, выполненным идентично основному приводу и установленным также на герметичном корпусе. Выходной элемент этого привода расположен перпендикулярно выходному элементу основного привода и кинематически связан посредством сильфонного ввода с исполнительным. Кинематическая связь выходного звена каждого из приводов перемещений с исполнительным органом выполнена в виде поворотного рычага, закрепленного одним концом на корпусе, и толкателя, установленного параллельно выходному элементу соответствующего привода и шарнирно связанного с поворотным рычагом и с исполнительным органом. При этом выходные элементы этих приводов перемещений связаны со средней частью поворотных рычагов, что обеспечивает увеличение хода исполнительного органа в герметичной камере.
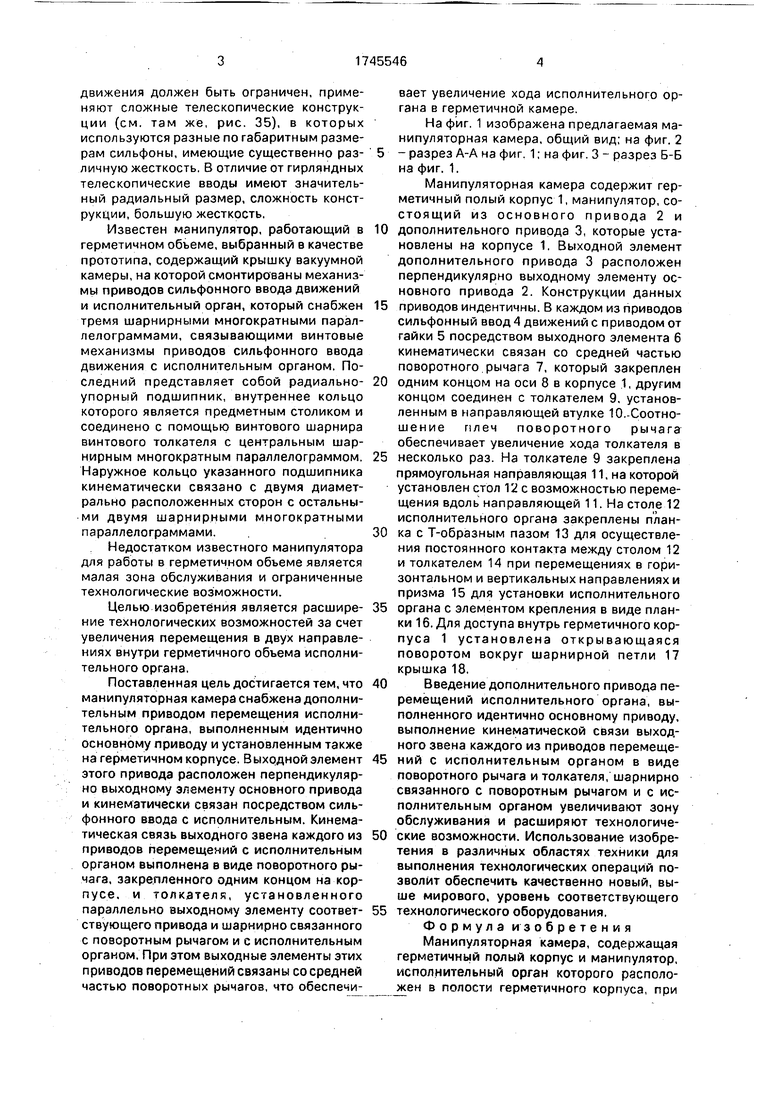
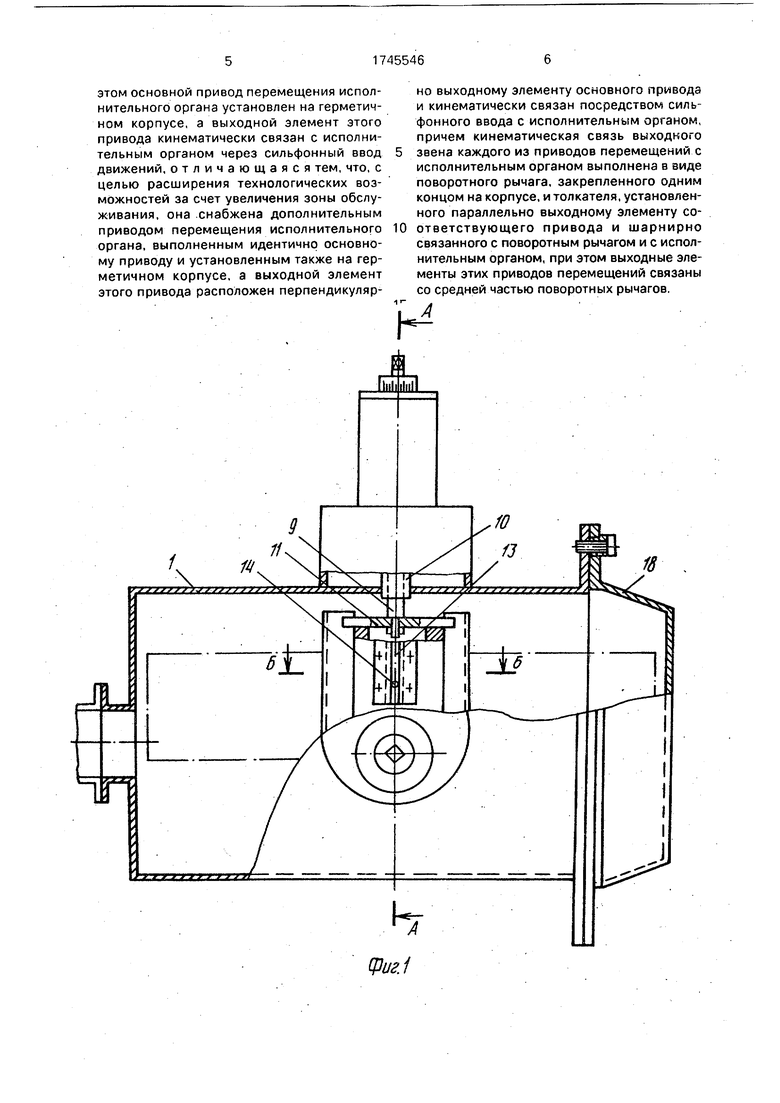
На фиг. 1 изображена предлагаемая манипуляторная камера, общий вид; на фиг. 2
- разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Манипуляторная камера содержит герметичный полый корпус 1, манипулятор, состоящий из основного привода 2 и
0 дополнительного привода 3, которые установлены на корпусе 1. Выходной элемент дополнительного привода 3 расположен перпендикулярно выходному элементу основного привода 2. Конструкции данных
5 приводов индентичны. В каждом из приводов сильфонный ввод 4 движений с приводом от гайки 5 посредством выходного элемента 6 кинематически связан со средней частью поворотного рычага 7, который закреплен
0 одним концом на оси 8 в корпусе 1, другим концом соединен с толкателем 9, установленным в направляющей втулке 10.-Соотношение плеч поворотного рычага обеспечивает увеличение хода толкателя в
5 несколько раз. На толкателе 9 закреплена прямоугольная направляющая 11, на которой установлен стол 12 с возможностью перемещения вдоль направляющей 11. На столе 12 исполнительного органа закреплены план0 ка с Т-образным пазом 13 для осуществления постоянного контакта между столом 12 и толкателем 14 при перемещениях в горизонтальном и вертикальных направлениях и призма 15 для установки исполнительного
5 органа с элементом крепления в виде планки 16. Для доступа внутрь герметичного корпуса 1 установлена открывающаяся поворотом вокруг шарнирной петли 17 крышка 18.
0 Введение дополнительного привода перемещений исполнительного органа, выполненного идентично основному приводу, выполнение кинематической связи выходного звена каждого из приводов перемеще5 ний с исполнительным органом в виде поворотного рычага и толкателя, шарнирно связанного с поворотным рычагом и с исполнительным органом увеличивают зону обслуживания и расширяют технологиче0 ские возможности. Использование изобретения в различных областях техники для выполнения технологических операций позволит обеспечить качественно новый, выше мирового, уровень соответствующего
5 технологического оборудования.
Формула изобретения Манипуляторная камера, содержащая герметичный полый корпус и манипулятор, исполнительный орган которого расположен в полости герметичного корпуса, при
этом основной привод перемещения исполнительного органа установлен на герметичном корпусе, а выходной элемент этого привода кинематически связан с исполнительным органом через сильфонный ввод движений, отличающаяся тем, что, с целью расширения технологических возможностей за счет увеличения зоны обслуживания, она снабжена дополнительным приводом перемещения исполнительного органа, выполненным идентично основному приводу и установленным также на герметичном корпусе, а выходной элемент этого привода расположен перпендикуляр0
но выходному элементу основного привода и кинематически связан посредством силь- фонного ввода с исполнительным органом, причем кинематическая связь выходного звена каждого из приводов перемещений с исполнительным органом выполнена в виде поворотного рычага, закрепленного одним концом на корпусе, и толкателя, установленного параллельно выходному элементу соответствующего привода и шарнирно связанного с поворотным рычагом и с исполнительным органом, при этом выходные элементы этих приводов перемещений связаны со средней частью поворотных рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705165C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705166C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2728274C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2688075C1 |
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
Использование: для автоматизации различных технологических операций в вакуумной камере, например сварки в вакууме, в среде инертных газов, при нанесении покрытий в электронной технике, а также износостойких покрытий режущего инструмента. Сущность изобретения: мани- пуляторная камера содержит герметичный полый корпус и манипулятор, исполнительный орган которого расположен в полости герметичного корпуса и кинематически связан посредством сильфонного ввода с основным и дополнительным приводами, расположенными на герметичном корпусе, а их выходные валы взаимно перпендикулярны. Кинематическая связь каждого из приводов перемещений выполнена в виде поворотного рычага, взаимодействующего с толкателем, установленным параллельно выходному валу, который связан со средней частью поворотного рычага. 3 ил.
Фиг.1
5 46
13
Я
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
