Изобретение относится к измерительной технике и может быть использовано для определения параметров сигналов, несущих информацию о каком-либо физическом процессе, например для определения параметров вектора дисбаланса.
Цель изобретения - повышение точности путем построения оптимального фильтра и устранения динамической погрешности при возможном изменении частоты,
На чертеже приведена структурная схема устройства, реализующего способ.
Способ заключается в том, что электрический сигнал, несущий информацию о физическом процессе, регистрируют на интервале, кратном периоду измеряемой гармонической составляющей, формируют последовательность коротких импульсов с тем же периодом следования,определяют частотно-временные характеристики зарегистрированного сигнала, по их значениям определяют передаточную характеристику фильтра, фильтруют им зарегистрированный сигнал. Кроме того, фильтрации под- верганэт сигнал, сформированный путем периодического повторения ранее зарегистрированного сигнала. Зарегистрированный сигнал дискретизируют по времени с периодом дискретизации, меньшим периода вращения механизма, преобразуют в цифровую форму, определяют число отсчетов N цифровой последовательности и фильтрацию выполняют путем дискретного преобразования Фурье цифровой последовательности в соответствии с выражением
1
S(k)-f;j-(n)e
j2Jtnk N
где п - текущий номер отсчета последова- .тельности х(п);
k - число оборотов, в течение которых производится регистрация.
Цифровую последовательность корректируют с помощью весовой решетчатой функции.
Параметры отфильтрованного сигнала определяют как результат осреднения промежуточных значений, получаемых путем многократного повторения измерительной процедуры.
Устройство для реализации способа содержит последовательно соединенные магнитофон 1, анализатор 2, вычислитель 3, перестраиваемый фильтр 4, второй вход которого соединен с выходом магнитофона 1, и вольтметрб, соединенный с управляющим входом магнитофона 1, блок 6 управления и соединенный с вторым выходом последнего фазометр 7. Входы магнитофона 1 и блока б управления соединены соответственно с
информационной шиной 8 и шиной 9 синхронизации.
Устройство реализует способ следующим образом.
В качестве примера рассматривается определение параметров вектора дисбаланса. Способ осуществляют поэтапно. В исходном состоянии на информационную шину 8 поступает злектрический сигнал,
0 пропорциональный вибрациям механизма; на шину 9 синхронизации поступают импульсы от датчика положения ротора механизма.
Первый этап - регистрация электриче5 ского сигнала. С приходом очередного импульса по шине 9 синхронизации блок 6 управления включает магнитофон 1 в режиме Запись. Длительность записи блок 6 управления определяет путем подсчета ко0 личества импульсов, поступающих на его вход по шине 9 синхронизации, и сравнения его с числом оборотов ротора механизма, в течение которых должен регистрироваться сигнал.
5 Второй этап - определение передаточной характеристики перестраиваемого фильтра 4. Блок 6 управления переводит магнитофон 1 в режим Воспроизведение. Воспроизведенный сигнал поступает в ана0 лизатйр 2, где определяются его частотно- временные характеристики. По значениям этих характеристик вычислитель 3 определяет параметры фильтра 4 и управляет перестраиваемым фильтром 4 таким образом,
5 что передаточная характеристика последнего устанавливается в соответствии со значением вычисленных параметров,
Третий этап - определение вектора дисбаланса. Блок 6 управления повторно
0 переводит магнитофон 1 в режим Воспроизведение. Электрический сигнал подвергается фильтрации и поступает на вход вольтметра 5 и.вход фазометра 7, с помощью которых определяются соответст5 венно амплитуда и фаза вектора дисбаланса.
Фильтрация сигнала, в частности, может быть выполнена с помощью цифровых фильтров или путем дискретного преобра0 зования Фурье(ДПФ). В случае применения ДПФ происходит свертка исходного сигнала с функцией прямоугольного окна (имеющего единичные значения во время выборки сигнала и нулевые во все остальные момен5 ты времени), что, по существу, также соответствует фильтрации. Коррекция цифровой последовательности весовой решетчатой функцией (часто называемой также функцией окна) обеспечивает более эффективное подавление боковых лепестков
передаточной функции эквивалентного фильтра ДПФ. Фильтрация сигнала, зарегистрированного за конечный отрезок времени, с помощью ДПФ позволяет получить наименьшую из всех возможных ширину полосы пропускания фильтра, что позволяет в большей степени,чем в других способах, ослабить влияние помех на результат измерений.
Может использоваться и аналоговый фильтр, перестраиваемый с помощью изменения номиналов пассивных элементов, дискретно-аналоговый фильтр на переключаемых конденсаторах, цифровой рекурсивный фильтр или эквивалентный фильтр ДПФ. Изменение передаточной функции фильтра заключается прежде всего в установке его центральной частоты в соответствии со средней частотой следования импульсов сопровождающей последовательности за отрезок времени, в течение которого происходит регистрация сигнала. Соответствие остальных характеристик фильтра параметрам сигнала покажем на примере установки ширины полосы пропускания фильтра. Она может быть определена по результатам измерения спектральной плотности мощности (СПМ) зарегистрированного сигнала. В случае отсутствия значительных спектральных составляющих в окрестности частоты следования сопровождающих импульсов ширина полосы пропускания фильтра устанавливается большей, чем при наличии значительных спектральных составляющих в окрестности этой частоты. В устройстве, на примере которого поясняется способ, возможно использование цифрового рекурсивного фильтра на базе микро-ЭВМ с соответствующим программным обеспечением.
Вычислитель может быть выполнен на базе управляющей микро-ЭВМ и объединен с фильтром. Характеристиками зарегистрированного сигнала, поступающего на вход вычислителя, могут быть: СПМ, интервал корреляции и др. На основе этих характеристик вычислитель По соответствующей программе рассчитывает необходимую передаточную функцию фильтра и устанавливает значения элементов фильтра, который ее реализует.
Блок управления предназначен для управления регистрацией сигнала и его последующим воспроизведением. Он снабжен пультом, с помощью которого оператор задает число импульсов сопровождающей последовательности k, определяющее время регистрации сигнала. После этого оператор с помощью соответствующей клавиши подает команду Старт, и блок управления гю
приходу первого синхроимпульса включает магнитофон. После поступления k-ro синхроимпульса в блок управления он выдает команду на прекращение регистрации сигнала и переводит магнитофон в режим воспроизведения. Минимально возможная полоса пропускания фильтра в соответствии с теоремой неопределенности обратно пропорциональна длительности зарегистрированного сигнала. Исходя из требований к ширине полосы пропускания фильтра и выбирается число импульсов сопровождающей последовательности.
Эффективность предлагаемого способа
по сравнению с прототипом определя ется повышением точности измерений. Это достигается за счет анализа зарегистрированного сигнала, определения параметров фильтра, наиболее полно отвечающих требованиям к выделению гармоник частоты вращения из его спектра, и фильтрации зарегистрированного сигнала с его помощью.
Формула изобретения
1.Способ определения амплитуды и фазы гармонических составляющих сигнала, заключающийся в том, что сигнал регистрируют, воспроизводят, фильтруют и измеряют параметры отфильтрованного сигнала, отличающийся тем, что, с целью повышения точности, перед регистрацией формируют короткие импульсы с периодом повторения, равным периоду измеряемой
гармонической составляющей сигнала, регистрацию сигнала осуществляют нэ ин- тервале времени, кратном периоду сформированной импульсной последовательности, измеряют частотно-временные
характеристики зарегистрированного сигнала м по их значениям синтезируют передаточную характеристику фильтра.
2.Способ по п. 1, отличающийся тем, что зарегистрированный сигнал дискретизируют по времени, преобразуют в цифровую форму, определяют число отсчетов N полученной цифровой последовательности и фильтрацию выполняют посредством дискретного преобразования
Фурье цифровой последовательности в соответствии с выражением
55
. N -1
S(k)-i- 2 x(n)exp(-jr7mk/N),
n 0
, где п - текущий номер отсчета последовательности х(п),
k - число периодов импульсной последовательности, в течение которых производится регистрация.
716138978
3. Способ no п. 2, отличающийся ректируют с помощью весовой решетчатой тем, что цифровую последовательность кор- функции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональное устройство для вибрационных испытаний конструкций | 1983 |
|
SU1133490A1 |
| Перестраиваемый цифровой фильтр с программируемой структурой | 2016 |
|
RU2631976C2 |
| Устройство для спектрально-временного анализа сигналов | 1989 |
|
SU1711109A1 |
| СПОСОБ ВЫРАВНИВАНИЯ КАНАЛОВ МНОГОКАНАЛЬНОЙ ПРИЕМНОЙ СИСТЕМЫ (ВАРИАНТЫ) | 2004 |
|
RU2289885C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕННОГО КОНТРОЛЯ ФИЗИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2017 |
|
RU2672794C1 |
| Автоматический измеритель частотных характеристик группового времени запаздывания четырехполюсника | 1990 |
|
SU1780046A1 |
| Устройство для контроля параметров магнитофона | 1984 |
|
SU1144150A1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОВЫСОТОМЕР | 2012 |
|
RU2522907C2 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности за счет построения оптимального фильтра и устранения динамической погрешности. Сигналы по информационной шине 8 и шине 9 синхронизации поступают соответственно на магнитофон 1 и блок 6 управления. Зарегистрированный сигнал поступает в анализатор 2, где определяются его частотно-временные характеристики, по которым вычислитель 3 определяет оптимальные параметры фильтра 4. После фильтрации вольтметром 5 и фазометром 7 измеряют амплитуду и фазу сигнала. 2 з.п.ф-лы, 1 ил.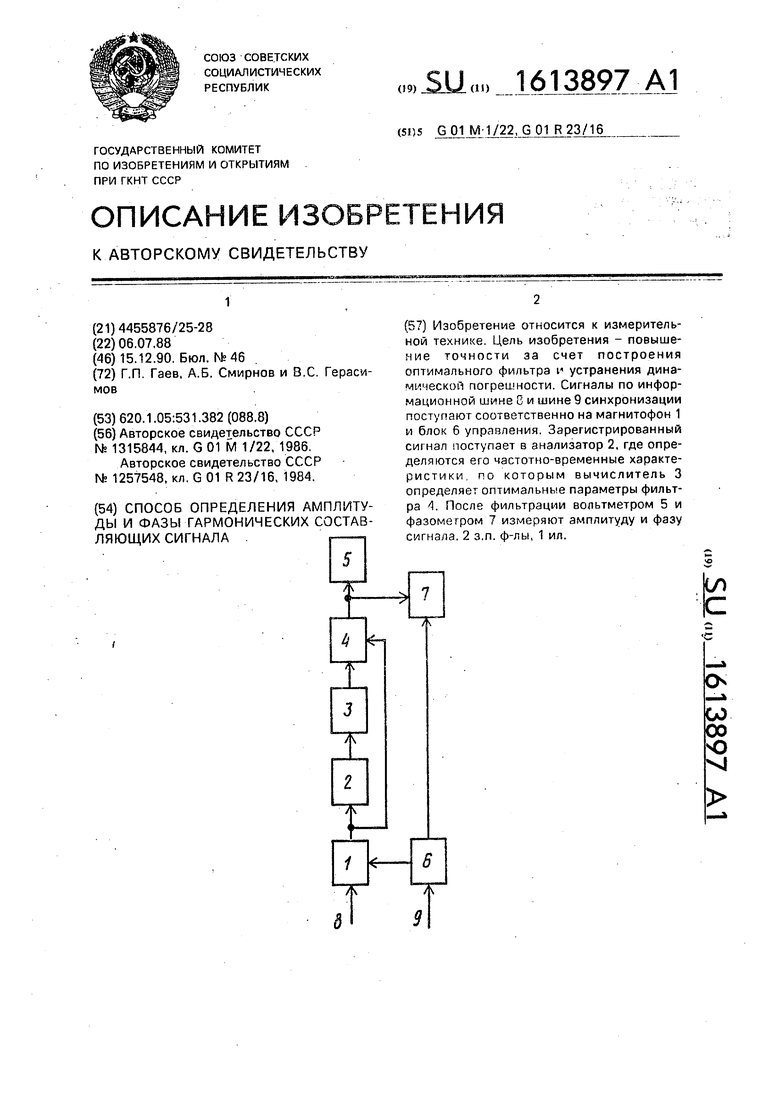
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1986 |
|
SU1315844A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Способ определения амплитуды и частоты гармонических составляющих сигнала | 1984 |
|
SU1257548A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
