Изобретение относится к приборостроению, в частности к магнитной записи, и может быть использовано в системах автоматического регулирования частоты вращения ведущего вала, а следовательно, и скорости перемещения носителя записи в магнитофонах..,
Цель изобретения - повышение точности регулирования частоты вращения вала лентопротяжного механизма магнитофона.
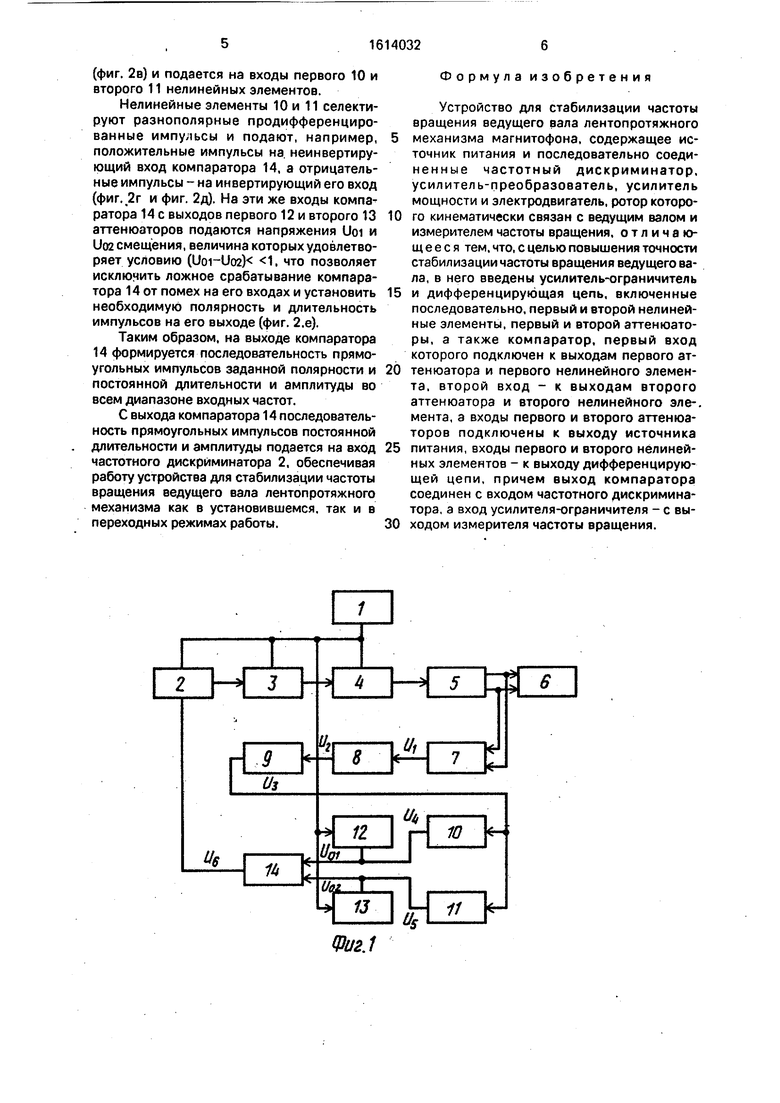
На фиг. 1 изображена функциональная схема предлагаемого устройства: на фиг. 2 - временные диаграммы напряжений, поясняк - щие принцип работы устройства: на фиг. 3 - алгоритмическая (структурная) схема устройства, где Wi(P)Ki/(Tip+1): W2(P)K2/T2p+1):
W3(P)K3/(T3p+1)x(T4p+1)
W4(P)K4/(T3p+1):
W5(P)K5- передаточные функции соответственно частотного дискриминатора, усилителя-преобразователя и усилителя мощности, электродвигателя по управляющему и возмущающему воздействиям, измерителя частоты вращения:
К:, К2, Кз, К4 и КБ - коэффициенты передачи:
TI, Т2. Тз и Т4 - постоянные времени fo(P). f3(P). ср) W (р). М(р) и V(p) - изображения по Лапласу задают чго воздействия, сигнала обратной связи, ошибки, регулируемой величины, возмущающих воздействий по моменту нагрузки и напряжению питания соответственно.
Устройство состоит из источника 1 питания, частотного дискриминатора 2. усилите- ля-преобразователя 3. усилителя 4 мощности, электродвигателя 5, ротор которого кинематически связан с ведущим валом 6 и измерителем 7 часто ы вращения, усилителя-ограничителя 8, дифференцирующей цепи 9. первого 10 и второго 11 нелинейных элементов, первого 12 и второго 13 аттенюаторов и компаратора 14.
Устройство аппаратурно может быть реализовано, например, следующим образом: источник 1 питания постоянного тока (авто
Е о
со
fO
k
Иомный или сетевой), частотный дискримм- Натор 2, усилитель-преобразователь 3, уси- Ьитель-ограничитель 8 и компаратор 14 (на Ьснове операционных усилителей с дифференциальными входами), усилитель 4 мощности (на транзисторах), электродвигатель 5 постоянного тока с возбуждением магнитов, измеритель 7 частоты вращения (индукционного или фотоэлектрического типа), Дифференцирующая цепь 9 (резистивно-ем- |костная), первый 10 и второй 11 нелинейные тементы (на диодах), первый 2 и второй 13 |атгенюаторы (на резисторах). : Устройство работает следующим образом.
В установившемся режиме ротор электродвигателя 5 вращается с номинальной (требуемой) частотой, поскольку ко входу электродвигателя 5 с выхода усилителя 4 мощности прикладывается номинальное управляющее напряжение. Кинематически :связанные с ротором электродвигателя 5 ведущий вал б и измеритель 7 частоты вращения также вращаются с номинальными частотами.
: При изменении момента нагрузки на ае- ;дущем валу 6 и напряжения источника 1 : питания от их номинальных значений изме- |няются соответственно и частоты вращения I ведущего вала 6 и измерителя 7 частоты вращения, а следовательно, и частота на- пряж ения на его выходе. Частотным дискриминатором 2 формируется сигнал I ошибки, величина которого пропорциональна отклонению частоты вращения ведущего вала 6 от номинального значения. Сформированный сигнал ошибки корректируется и усиливается по напряжению усилителем- преобразователем 3. а по мощности - уси лителем 4 мощности и прикладывается к входу электродвигателя 5 таким образом, чтобы скомпенсировать действие возмущающих воздействий с точностью до величины установившейся ошибки.
В соответствии с алгоритмической схемой (фиг. 3) изображения по Лапласу ошибка 0(р) регулирования имеет вид:
/у ч W4(p)Afe(p) .
р)-т+Щр)
М(р)
ЖеЖй т+ЩрГ
V(p),
где W(prWi(p); W2(p); W3(p): W5(p) - переда- функция разомкнутого устройства ста5или зцим.
При постоянных по величине отклонениях момента М нагрузки и напряжения U питания из формулы (1) получим выражению
для вынужденной (установившейся) составляющей ошибки регулирования:
/3
K/iKsM КзКб-У 1 + Кр 1 + Кр
(2)
где Kp Ki. К2, Кз, Кз- коэффициент передачи разомкнутого устройства.
Для устройства управления частотой вращения ведущего вала лентопротяжного механизма магнитофона (ЛПМ) справедливо неравенство
Тз Ti Т2 Т4,
(3)
где TI. Т2, Тз и Т4 - постоянные времени соответственно частотного дискриминатора, усилителя-преобразователя с усилителем мощност - и электродвигателя
(электромеханическая и электромагнитная).
Как следует из выражения (2), величина
установившейся ошибки тем меньше, чем
больше Кр. Исходя из условия устойчивости
устройства с учетом неравенства (3), предельное значение Кр не может быть принято больше l/Ti. Значение постоянной времени Ti выбирают исходя из соображений допустимых пульсаций сигнала ошибки, снимаемого с выхода частотного дискриминатора 2.
Поэтому, чем выше частота выходного напряжения измерителя 7 частоты вращения, тем меньше постоянная времени Ti и, как следствие, больше Кр. Частота выходного напряжения (Гц) измерителя 7 индукционного или фотоэлектрического типа определяется соотношением
f э wZ ,
где fu и Z - частота вращения (с ) и число зубьев (отверстий) ротора измерителя 7 соответственно.
Повышение точности осуществляется за счет увеличения коэффициента передачи
разомкнутого устройства без уменьшения запасов устойчивости по модулю и фазе, поскольку на выходе компаратора 14 повышается частота следования импульсов при их постоянной длительности и амплитуде, в
результате чего постоянная времени Ti может быть уменьшена в 2 раза и, следовательно, коэффициент Кр передачи разомкнутого устройства может быть увеличен в 2 раза. На вход усилителя-ограничителя 8 подается сигнал с выхода измерителя 7 частоты вращения (фиг. 2а). Этот сигнал усиливается и ограничивается по амплитуде усилителем- ограничителем 8 (фиг. 26), дифференцируется по времени дифференцирующей цепью 9
(фиг. 2в) и подается на входы первого 10 и второго 11 нелинейных элементов.
Нелинейные элементы 10 и 11 селектируют разнополярные продифференцированные импульсы и подают, например, положительные импульсы на. неинвертирующий вход компаратора 14, а отрицательные импульсы - на инвертирующий его вход (фиг.,2г и фиг. 2д|. На эти же входы компаратора 14 с выходов первого 12 и второго 13 аттенюаторов подаются напряжения Uoi и Uo2 смещения, величина которых удовлетворяет условию (Uoi-Uci2) 1. что позволяет исключить ложное срабатывание компаратора 14 от помех на его входах и установить необходимую полярность и длительность импульсов на его выходе (фиг. 2.е).
Таким образом, на выходе компаратора 14 формируется последовательность прямоугольных импульсов заданной полярности и постоянной длительности и амплитуды во всем диапазоне входных частот.
С выхода компаратора 14 последовательность прямоугольных импульсов постоянной длительности и амплитуды подается на вход частотного дискриминатора 2, обеспечивая работу устройства для стабилизации частоты вращения ведущего вала лентопротяжного механизма как в установившемся, так и в переходных режимах работы.
Формула изобретения
Устройство для стабилизации частоты вращения ведущего вала лентопротяжного механизма магнитофона, содержащее источник питания и последовательно соединенные частотный дискриминатор, усилитель-преобразователь, усилитель мощности и электродвигатель, ротор которого кинематически связан с ведущим валом и измерителем частоты вращения, отличающееся тем, что, с целью повышения точности стабилизации частоты вращения ведущего вала, в него введены усилитель-ограничитель и дифференцирующая цепь, включенные последовательно, первый и второй нелинейные элементы, первый и второй аттенюаторы, а также компаратор, первый вход которого подключен к выходам первого аттенюатора и первого нелинейного элемента, второй вход - к выходам второго аттенюатора и второго нелинейного эле-, мента, а входы первого и второго аттенюаторов подключены к выходу источника питания, входы первого и второго нелинейных элементов - к выходу дифференцирующей цепи, причем выход компаратора соединен с входом частотного дискриминатора, а вход усилителя-ограничителя - с выходом измерителя частоты вращения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скорости перемещения магнитной ленты | 1990 |
|
SU1753490A1 |
| Устройство для стабилизации скорости движения магнитного носителя | 1983 |
|
SU1137522A1 |
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1691885A1 |
| Устройство для управления асинхронным двигателем | 1979 |
|
SU1192641A3 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Устройство для трансформирования снимков | 1979 |
|
SU859814A1 |
| Устройство регулирования частоты вращения магнитных дисков | 1980 |
|
SU930372A1 |
| Устройство для управления скоростью вращения электродвигателя лентопротяжного механизма | 1977 |
|
SU615532A1 |
| Электромеханический следящий привод постоянного тока | 1989 |
|
SU1640668A1 |
| Устройство для стабилизации скорости ленточного носителя | 1978 |
|
SU769613A1 |

Изобретение относится к приборостроению, в частности к технике магнитной записи. Цель изобретения - повышение точности стабилизации частоты вращения ведущего вала за счет повышения коэффициента передачи разомкнутого устройства при сохранении запаса устойчивости. Устройство содержит последовательно соединенные частотный дискриминатор, усилитель-преобразователь, усилитель мощности и электродвигатель, ротор которого кинематически связан с ведущим валом и измерителем частоты вращения, при этом усилитель-ограничитель, два нелинейных элемента, первый и второй аттенюаторы и компаратор обеспечивают увеличение коэффициента передачи при сохранении устойчивости. 3 ил.
Фиг.1
Фиг.г
мм
v{p
IP Blp) . „ .
}- МгЧ зМ
Il..J L,
й;/ь;
| Устройство для стабилизации частоты вращения электродвигателя | 1977 |
|
SU669398A1 |
| кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
