Изобретение относится к оборудованию, предназначенному для подъема рабочих и грузов при помощи вилочного погрузчика, и может быть использовано в различных отраслях народного хозяйства.
Цель изобретения - упрощение конструкции.
На фиг. 1 дана рабочая платформа, общий вид; на фиг. 2 - то же, рабочее положение; на фиг. 3 - рабочая платформа, вид сверху.
Рабочая платформа для вилочного погрузчика содержит нижнкЗю раму 1 и параллельную ей верхнюю раму 2 (фиг. 1). Рамы 1 и 2 снабжены пространственытм шарнирно- рычажным механизмом 3 типа нюрнбергских ножниц, выполненным в виде соединенных осями 4 пар перекрещивающихся рычагов 5 и б, которые своими концами шарнирно со динены по осям 7. Верхний конец верхнего рычага 5 и нижний конец нижнего рычага 6 шарнирно закреплены соответственно на раме 2 и раме 1 по осям 8 и 9. Верхний конец верхнего рычага 6 и нижний конец нижнего рычага 5 соответственно роликами 10 и 11 на осях 12 и 13 установлены подвижно в горизонтальных направляющих 14 и 15 соответственно верхней 2 и нижней 1 рам.
На верхней раме 2 установлены вертикальные стойки 16 и съемные ограждения 17.
Нижняя рама 1 установлена, например, на грузоподъемных вилах (не показано) или прикреплена вертикальной стенкой 18 к каретке 19 грузоподъемника 20 погрузчи- ка21.
На раме 22 грузоподъемника 20. например, на боковь1х гранях перпендикулярно к ним смонтированы упоры 23, выполненные, например, в виде роликов. Нижние концы нижних рычагов 5 и 6 шарнирно-рычажного механизма 3 соединены осями 13 и 9 с верхними концами пары соединенных осями g4
перекрещивающихся дополнительного и вспомогательного рычагов 25 и 26 так, что образуется параллелограмм. При этом нижний конец 27 дополнительного рычага 25
имеет возможность контактирования с упором 23.
Рабочая платформа работает следующим образом.
Стропальщик или комплектовщик заходит на рсчму 2 и закрепляет съемные ограждения 17 на вертикальных стойках 16. Водитель погрузчика 21 нажимает соответствующие рукоятки на пульте управления (не показано). При этом каретка 19 грузояодъемника 20 поднимается по раме 22 и поднимает раму 1 с вертикальной стенкой 18 до высоты, обус.|0вленной верхним положением каретки 19 погрузчика 21 или до момента упора концов 27 рычагов 25 в упоры 23, установленные на раме 22 без подъема рамы 2 относительно рамы 1,
При дальнейшем перемещении рамы 1 вверх конец 27 дополнительного рычага 25 упирается в упор 23 (фиг. 2). Рычаги 25, 26,
5, 6 поворачиваются друг относительно друга на осях 4, 7, 8. 9,12, 13,24. Концы рычагов 25, 5 и 6 роликами 11 и 10 перемещаются соответственно в горизонтальных направляющих 15 и 14 вправо. Верхние концы верхних рычагов 5 и 6 шарнирно-рычажного механизма 3 перемещаются относительно рамы 1 вверх и перемещают раму 2 относительно рамы 1 вверх.
По окончании работы рабочая платформа опускается в исходное положение.
Отсутствие дополнительного специального привода подъема рабочей платформы упрощает ее конструкцию.
Формула изобоетения
1. Рабочая платформа для вилочного погрузчика, содержащая две параллельные одна другой рамы, соединенные между собой пространственным шарнирно-рычаж- ным механизмом, установленным с возмож- ностью вертикального перемещения приводом, отличающаяся тем. что, с целью упрощении конструкции, указанный механизм выполнен в виде нюрнбергских ножниц, а указанный привод образован по крайней мере одним упором, который закреплен на раме грузоподьемника погрузчика, одним вспомогательным рычагом, шарнирно связанным со средней частью до
полнительного рычага, который установлен с возможностью взаимодействия своим консольным концом с упором, эти рычаги шарнирно связаны с нижними концами нижних рычагов указанного механизма, образуя с ними параллелограммный механизм.
2. Платформа поп. 1,отличаю щая- с я тем, что упор выполнен в виде ролика и установлен на боковой грани рамы грузоподьемника погрузчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочая платформа на вилочном погрузчике | 1989 |
|
SU1615153A1 |
| Подъемная платформа | 1990 |
|
SU1730023A1 |
| РАБОЧАЯ ПЛАТФОРМА НА ВИЛОЧНОМ ПОГРУЗЧИКЕ | 1991 |
|
RU2021972C1 |
| Подъемник | 1990 |
|
SU1801941A1 |
| Сталкиватель груза вилочного погрузчика | 1982 |
|
SU1004254A1 |
| Поъемник | 1990 |
|
SU1791368A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |

Изобретение относится к оборудованию, предназначенному для подъема рабочих и грузов при помощи вилочного погрузчика, и может быть использовано в различных отраслях народного хозяйства. Цель изобретения - упрощение конструкции. Рабочая платформа для вилочного погрузчика содержит две рамы 1, 2, параллельные друг другу и соединенные между собой пространственным шарнирно-рычажным механизмом типа нюрнбергских ножниц. При этом верхняя рама 2 снабжена ограждениями 17. Новым в устройстве является то, что на боковых гранях рамы 22 грузоподъемника погрузчика 21 перпендикулярно к ним смонтированы упоры 23 в виде роликов. Нижние концы нижних перекрещивающихся рычагов пространственного шарнирно-рычажного механизма соединены шарнирно осями с верхними концами пары соединенных осями перекрещивающихся дополнительного 25 и вспомогательного 26 рычагов так, что образуется параллелограмм, а нижний консольный конец дополнительного рычага имеет возможность контактирования с упорами 23. При подъеме каретки 19 погрузчика 21 дополнительный рычаг 25, взаимодействуя с упором 23, приводит в движение шарнирно-рычажный механизм 3, который поднимает раму 2 рабочей платформы на дополнительную высоту. 1 з.п. ф-лы, 3 ил.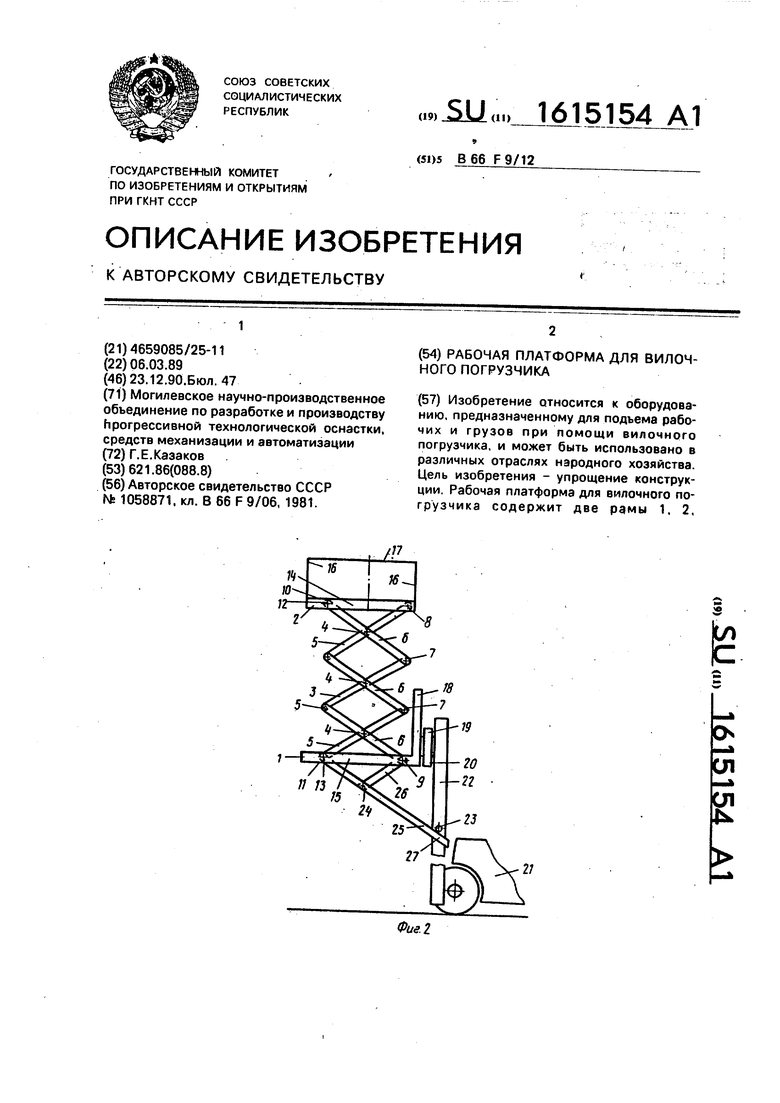
-1J
20
П
б м
/ff
X Х
| Навесной подъемник | 1981 |
|
SU1058871A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
