(PU2.1
Изобретение относится к весоизмерительной технике и предназначено для определения жесткости и гистерезиса упругих элементов, используемых, например, в электронных весах.
Цель изобретения - повышение точности и быстродействия.
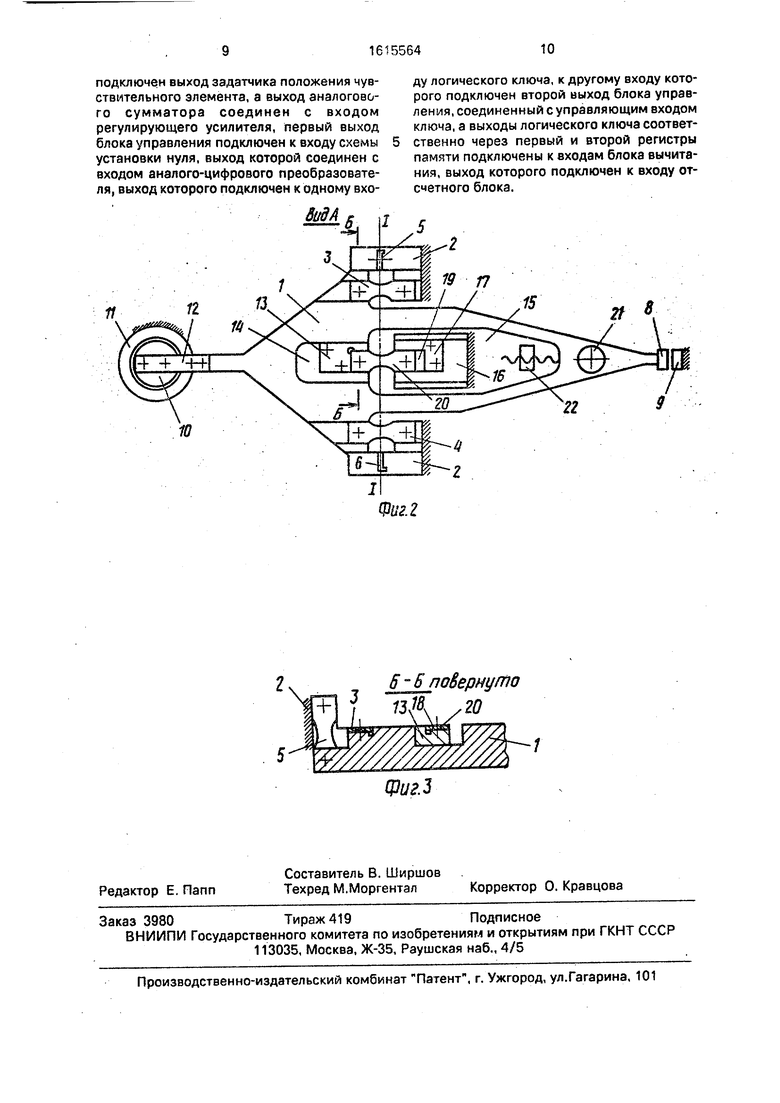
На фиг. 1 схематично показан общий вид устройства и блок-схема его электрической части; на фиг. 2 - вид А на фиг. 1; на фиг.3 - разрез Б-Б на фиг. 2.
Устройство содержит коромысло 1 основание 2, горизонтальные упругие опоры 3 и 4, вертикальные упругие опоры 5 и 6, датчик 7 положения, подвижная часть 8 которого закреплена на коромысле 1 а неподвижная часть g - на основании 2, ка- тушку 10 электромагнитного компенсатора П. которая с помощью планки 12 жестко закреплена на коромысле 1.
Сменный корпус 13 закреплен в выемке М, которая выполнена в одной части середины коромысла 1. В другой части коромысла 1 выполнено окно 15, в пространстве которого расположена плита 16, закрепленная на основании 2. На плите 16 установлен сменный корпус 17. Сменные корпуса 13 и 17 снабжены базовыми поверхностями 18 и IS, относительно которых базируется и на которые устанавливается измеряемая упругая опора 20.
Базовые поверхности 18 и 19 сменных корпусов 13 и 17 расположены в одной плоскости с горизонтальными упругими опора- М1 3 и 4 коромысла 1 и симметрично относительно оси Н, проходящей через точки пересечения крестообразных упругих опор 3 и 5,4 и 6, благодаря чему измеряемая |упругая опора 20 располагается симметрич- |но относительно горизонтальных исходных
опор Зи4 и симметрично относительно тра крестообразных упругих опор 3 и 5 и 6,
Геометрический центр измеряемой упругой опоры 20 расположен на оси , а сама опора 20 расположена в одной плоскости с горизонтальными исходными упруги- Ии опорами 3 и 4. Такое расположение Измеряемой упругой опоры 20 необходимо ,Для того, чтобы приращение жесткости ис- Кодной упругой системы было только за счет .(кесткости измеряемой упругой опоры 20 и чтобы ее работа на коромысле 1 была идентична работе ее в чувствительном элементе ; лектронных весов. Сменные корпуса 13 и 17 позволяют измерять жесткость различ- мых упругих опор 20, имеющих другие размеры по сравнению с исходными упругими порами 3-6. Базовые поверхности 18 и 19 именных корпусов 13 и 17 выполняются под
4 5
55
хв
конкретную измеряемую упругую опору 20 и располагаются относительно коромысла 1 соответствующим образом.
Для получения высокой чувстаительно- 5 сти коромысла 1 за счет распределения масс применяются регулятор 21 центра тяжести и регулятор 22 равновесия.
Устройство содержит систему автоматического уравновешивания, состоящую из 10 датчика 7 положения регулирующего усилителя 23 с электромагнитным компенсатором 11, с цепью катушки 10 которого соединены аналого-цифровой преобразователь 24 (АЦП) и опорный резистор 25, подключен- 15 ныи к общей шине питания. Для определения жесткости и гистерезиса упругой опоры в устройство введены аналоговый сумматор 26, задатчик 27 перемещения, ключ 28. блок ог. л логтический ключ 30, схема и л установки нуля, два регистра 32 и 33 памяти, цифровой индикатор 34, вычитающий блок 35 и отсчетный блок 36. Для исключения деформации исходных опор 3-6 при установке на коромысло 1 измеряемой о упругой опоры 20 устройство содержит изолирующий механизм, содержащий электропривод 37, кулачок 38, штанги 39, упоры 40. Блок 29 управления имеет несколько ре- жимов работы. В режиме Настройка вклю- JO чается 31 установки нуля, и ключ 28 отключает от аналогового сумматора 26 задатчик 27 перемещения, логический ключ 30 отключен. В режиме Калибровка схема 31 oi. Уя отключена, логический ключ ЗЬ 30 подключает выход АЦП 24 на регистр 32 памяти, ключ 28 подключает задатчик 27 пере мещения к аналоговому сумматору 26. Если при установке измеряемой упругой опоры 20 необходима фиксация коро- 40 ысла для повышения надежности, то Бютючается режим Изолир, при этом электропривод 37 поворачивает кулачок 38, перемещая штанги 39, которые конусной поверхностью поднимают упоры 40 вверх 5 до соприкосновения с коромыслом 1, которое фиксируется упорами 40. В режиме Измерение жесткости схема 31 отключена, логический ключ 30 подключает выход АЦП 24 к регистру 33 памяти, задатчик 27 0 перемещения через ключ 28 подключен к аналоговому сумматору 26.
В режиме Измерение гистерезиса схема 31 отключена, логический ключ 30 отключен, ключ 28 выключен и задатчик 27 5 перемещения отключен от аналогового сумматора 26. Аналоговый сумматор 26 предназначен для алгебраического суммирования сигналов с датчика 7 положения и с зэдатчика 27 перемещения.
Задатчик 27 перемещения предназначен для выработки выходного сигнала Ua.n, поступающего на аналоговый сумматор 26. Выходное напряжение Ua.n задатчика 27 перемещения устанавливается из соотношения
Ua.n Зд.п Ah,
где Ah- требуемая контролируемая величина перемещения подвижной части в относительно неподвижной части 9 датчика 7 положения, мм;
5д.п - крутизна датчика 7 положения, В/мм.
Задатчик 27 перемещения предназначен для создания калиброванного по величине напряжения.
Схема 31 установки нуля служит для приведения показаний АЦП 24 к нулю, показаний, передаваемых на цифровой индикатор 34. Регистры 32 и 33 памяти предназначены для хранения выходных кодов АЦП 24. Вычитающий блок 35 предназначен для вычитания кодов регистров 32 и 33 памяти. Блок 29 управления предназначен для задания оператором с помощью коммутационных элементов электрических сигналов включения соответствующих эле- схемы устройства в соответствии с включаемым режимом работы.
Исходные упругие опоры 3-6 коромысла 1 имеют плоскую форму и изготавливаются из материалов, не имеющих гистерезиса или с минимальным гистерезисом. Название крестообразные упругие опоры относится не к форме упругих опор (они плоские), а к взаимному их расположению, т. е. две смежные плоские опоры 3 и 5,4 и 6 расположены друг относительно друга крестообразно.
Устройство работает следующим образом.
Коромысло 1 без измеряемой упругой опоры 20 находится в равновесии, при котором с датчика 7 положения на один из входов аналогового сумматора 26 поступает напряжение Уд.п . близкое к нулю, U д. входное напряжение Uex. поступающее на регулирующийусилитель23 с выхода аналогового сумматора 26, также близко к нулю , компенсационный ток 1к, вырабатываемый регулирующим усилителем, также близок к нулю; падение напряжения RO на опорном резисторе 25 также близко к нулю и выходной код с АЦП 24 близок к нулю, на цифровом индикаторе 34 - нули. В режиме Настройка оператор с помощью схемы 31 установки нуля обнуляет выходную информацию с АЦП 24. контролируя ее по показаниям цифрового индикатора 34. В
режиме Калибровка к аналоговому сумматору 26 через ключ 28 подключается задат- чик 27 перемещения, на выходе которого задается выходное напряжение Ua.n ., соот- 5 ветствующее требуемой заданной величине перемещения Ah подвижной части 8 датчика 7 положения. Появление напряжения на втором входе аналогового сумматора 26 вызывает изменение его выходного сумматора
0 сигнала. Входное напряжение UBX регулирующего усилителя 23 будет равно UBX Уд.п- - Ua.n., а поскольку ид.п., то UBX «Ua.n. Под действием сигнала UBX изменится выходное напряжение регулирующего усили5 теля 23, а протекание компенсационного тока 1к через обмотку катушки 10 компенсатора 11 вызовет приращение напряжения на опорном резисторе UHCX IK Ro. Это напряжение пропорционально величине пе0 ремещения и исходной жесткости исходной упругой системы коромысла, содержащей упругие опоры 3-6.
Усилие РИСХ на катушке 10 компенсатора 11 заклоняет коромысло 1 на угол, при
5 котором величина перемещения Ah датчика 7 положения соответствует величине, за-- данной задатчиком 27 перемещения. При этом с выхода АЦП 24 поступает сигнал, пропорциональный напряжению UMCX на
0 опорном резисторе 25, усилию РИСХ и исходной жесткости ZHCX исходной упругой
системы коромысла, поэтому выходной код АЦП 24 может быть проградуирован в единицах жесткости (Н/м) и значение исходной жесткости ZHCX исходной упругой системы коромысла 1 через логический ключ 30 поступает в регистр 32 памяти и там хранится. Включают на блоке управления режим
Изолир, устанавливают измеряемую упругую опору 20 на сменные корпуса 13 и 17. один из которых находится на коромысле 1, другой - на плите 16 основания 2. Включают режим Настройка, при котором с помощью схемы 31 установки нуля устанавливают Нули на цифровом индикаторе 34. поскольку при установке измеряемой упругой опоры 20 возможно нарушение равновесия коромысла 1.
Включается режим Измерение жесткости, к аналоговому сумматору 26 через ключ 28 подключается задатчик 27 перемещения, на выходе которого напряжение Уз.п имеет ту же величину, что и в режиме
Калибровка, следовательно,так же, как и в режиме Калибровка, величина перемещения датчика 7 положения Ah const, но при этом новая суммарная жесткость системы стала больше по сравнению с исходной
жесткостью исходной упругой системы на величину жесткости измеряемой упругой опоры.
Чтобы заслонить коромысло на тот же угол, соответствующий смещению датчика 7 перемещения А h const при новой жесткости упругой системы, компенсационный ток 1к1 увеличивается и напряжение на опорном резисторе UHOB 1к1 . RO будет больше UHCX. IK . RO, следовательно, усилие FHOB на катушке 10 компенсатора 11 будет пропорционально новой жесткости новой упругой системы коромысла 1, а сигнал с выхода АЦП 24, пропорциональный усилию FKOB и
новой жесткости ZHOB --ГТГ новой упругой
системы коромысла 1, содержащей упругие опоры 3 - 6 и 20 (измеряемую упругую опору), поступает через логический ключ 30 на регистр 33 памяти.
В режиме Измерение жесткости на вход вычитающего блока 35 с регистров 32 и 33 памяти поступают коды значений исходной жесткости ZHCX исходной упругой системы коромысла 1 и новой жесткости 2нов новой упругой системы коромысла 1, отличающейся от исходной только наличием измеряемой упругой опоры 20, следовательно значение жесткости измеряемой упругой опоры равно разности ZHOB - ZMCX , которая ояределяется в вычитающем блоке 35.
Включают режим Измерение гистерезиса, при котором задатчик 27 перемещения отключается от аналогового сумматора 26. на регулирующий усилитель поступает сигмап только с датчика 7 положения, равный нулю. Если измеряемая упругая опора 20 не имеет гистерезиса (остаточных упругих напряжений от деформаций при закло- нении коромысла на угол, соответствующий смещению датчика 7 положения на Ah const). то на цифровом индикаторе 34 будут нули.
Если измеряемая упругая опора имеет гистерезис, чтобы вернуть коромысло 1 в исходное положен1 е, потребуется увеличение компенсационного тока 1к на величину , пропорциональную гистерезису измеряемой упругой опоры 20, приращение компенсационного тока 1к создаст падение напряжения UmcT Л1к . Ro на опорном резисторе и с выхода АЦП 24 поступит код, пропорциональный величине гистерезиса измеряемой упругой опоры 20, цифровое значение которого считывается с цифрового индикатора 34 в режиме Измерение гистерезиса, поскольку после установки измеряемой упругой опоры 20 в режиме Настройка на цифровом индикаторе 34 с
помощью схемы 31 установки нуля были выставлены нули,
При измерении гистерезиса измеряемой опоры 20 исходные упругие опоры 3-6 подбирают из такого материала, чтобы гистерезис их был равен нулю или близок к этой величине, если это не удается, то гистерезис измеряемой упругой опоры 20 может быть определен оператором как разность гистерезиса новой упругой системы (с измеряемой упругой опоры) и исходной упругой системы, гистерезис которой легко может быть определен тем же методом по цифровому индикатору 34.
Формула из обретения Устройство для определения жесткости и гистерезиса упругой опоры, содержащее чувствительный элемент, закрепленный на упругих опорах, датчик положения, подвижная часть которого соединена с чувствитель- ным элементом, и электромагнитный компенсатор системы уравновешивания, катушка которого жестко закреплена на чувствительном элементе и подключена одним концом к выходу регулирующего усилителя, а другим концом - к входу аналого- цифрового преобразователя и к опорному резистору, соединенному с общей шиной питания, цифровой индикатор, подключенный к выходу анагого-цифрового преобразователя, иотсчетныйблок, отличающееся тем, что, с целью повышения точности и быстродействия, в него введены опорная плита, два сменных корпуса с базовыми поверхностями под измеряемую упругую опору, аналоговый сумматор, задатчик положений чувствительного элемента, ключ, блок управления, два регистра памяти, схема установки нуля, логический ключ и вычитающий блок, причем чувствительный элемент выполнен в виде коромысла, закрепленного на крестообразно расположенных вертикальных и горизонтальных упругих опорах, в одной части середины которого выполнена выемка, в которой закреплен один сменный корпус, а в другой части середины коромысла выполнено окно, в котором на опорной плите расположен второй сменный корпус, базовая поверхность которого и базовая поверхность первого сменного корпуса расположены в одной плоскости с горизонтальными упругими опорами коромысла и симметрично относительно оси, проходящей через точки пересечения крестообразно расположенных упугих опор, при этом выход датчика положения чувствительного элемента подключен к одному входу аналогового сумматора, к другому входу которого через ключ
подключен выход задатчика положения чувствительного элемента, а выход аналогового сумматора соединен с входом регулирующего усилителя, первый выход блока управления подключен к входу схемы установки нуля, выход которой соединен с входом аналого-цифрового преобразователя, выход которого подключен к одному входу логического ключа, к другому входу которого подключен второй выход блока управления, соединенный с управляющим входом ключа, а выходы логического ключа соответственно через первый и второй регистры памяти подключены к входам блока вычитания, выход которого подключен к входу от- счетного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения количества однотипных предметов в партии | 1990 |
|
SU1783316A1 |
| Устройство для регистрации одиночных ударов | 1987 |
|
SU1479878A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАКОПЛЕНИЯ ЭНЕРГИИ В МАТЕРИАЛЕ ПРИ ЦИКЛИЧЕСКОМ НАГРУЖЕНИИ | 1994 |
|
RU2087895C1 |
| ОПЕРАТИВНЫЙ КОНТРОЛЛЕР СУММАРНОЙ МОЩНОСТИ НАГРУЗКИ ГРУППЫ ЭНЕРГОПОТРЕБИТЕЛЕЙ | 1998 |
|
RU2145717C1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Устройство для измерения линейных размеров образцов материалов | 1987 |
|
SU1696844A1 |
| Тензометрическое устройство | 1990 |
|
SU1781565A1 |
| Автоматическое весоизмерительноеуСТРОйСТВО | 1979 |
|
SU851107A1 |
| Устройство для автоматического контроля нагрева горных машин | 1991 |
|
SU1758242A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность и быстродействие измерения. В коромысле 1 выполнены выемка и окно, в которых устанавливают сменные корпуса с базовыми поверхностями под измеряемую упругую опору. При измерении к аналоговому сумматору 26 через ключ 28 подключается задатчик 27 перемещения коромысла 1. Регистры памяти 32 и 33 запоминают сигналы аналого-цифрового преобразователя 24 при отклонении на одну величину коромысла 1 без измеряемой опоры и с измеряемой опорой. Блок вычитания 35 определяет разность сигналов, запомненных в регистрах 32 и 33, которая характеризует жесткость измеряемой опоры. 3 ил.
ВидА
1Q
22
Z
поВериуто ь/
| Автоматические весы | 1983 |
|
SU1154542A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - М.:Внешторгиздат, 1967 | |||
| с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
