О5
СП
О5 Ю
1
Изобретение относится к измерения |айраметров движения и может быть ис- ользовано для измерения скорости ли ее реализации, а также в автоматических системах для регулирования Скорости электродвигателя.
Целью изобретения является повышение точности измерения.
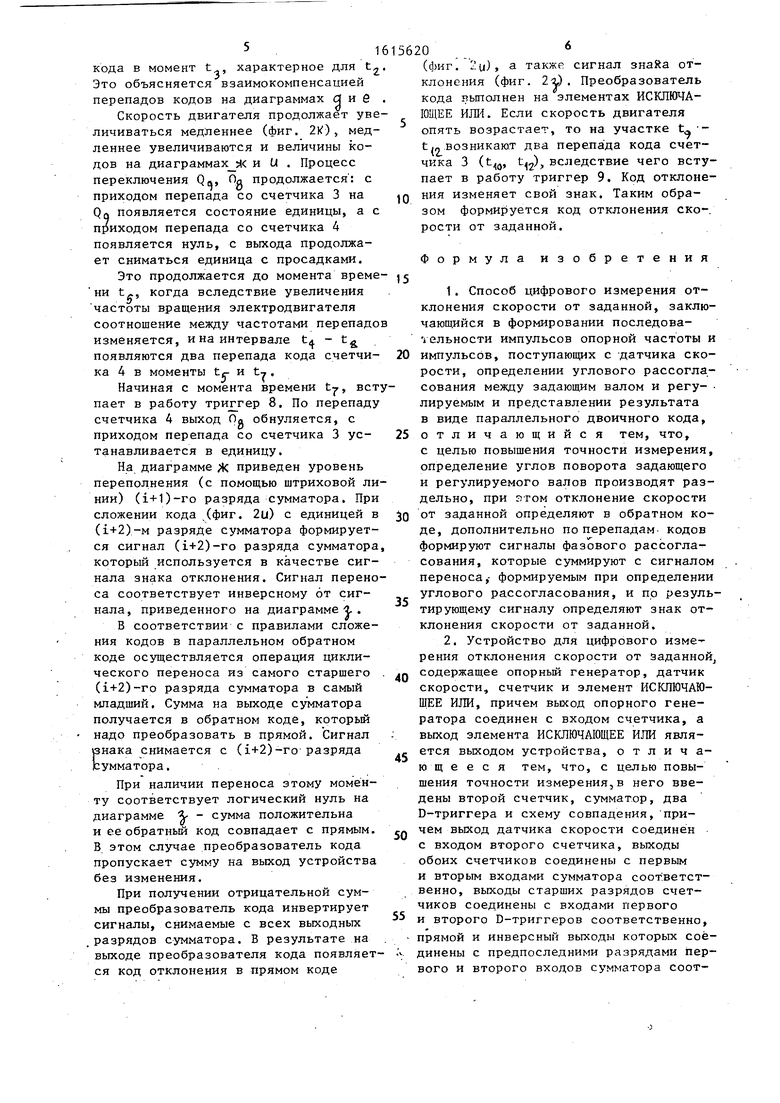
На фиг. 1 приведено устройство |для реализации способа цифрового из- |мерения отклонения скорости от задан- |ной, на фиг. 2 приведены временные диаграммы работы устройства.
Устройство содержит опорный гене- атор 1, датчик 2 скорости электро- вигателя, счетчики прямого счета 3 обратного счета 4, фазовый дискри- натор 5, сумматор 6, преобразова- ель 7 кода. Импульсный датчик 2 скорости подключен к входу счетчика |4 обратного счета, генератор 1 опор- ной частоты - к счетчику 3 прямого чета. Выходы счетчиков подключены к ходам сумматора 6. Выходы старших азрядов счетчиков 3 и 4 подключены к входам фазового дискриминатора, выходы которого подключены к входам сумматора 6. Код, снимаемый с выхода сумматора 6, через переключатель 7 ;Кода поступает на выход устройства. :Фазовый дискриминатор 5 содержит два D-триггера 8 и 9 и схему 10 совпадения.
Устройство работает следующим об- ;разом.
; На входе устройства форьшруется последовательность импульсов опорной :частоты и импульсов, поступающих с датчика скорости, затем опред еляется угловое рассогласование между задающим и регулируемым валами, при этом определение углов поворота задающего и регулируемого валов производится раздельно, по перепадам кодов формируются сигналы фазового рассогласования, которые суммируются с сигналом переноса, формируемым при определени углового рассогласования, по результрующему сигналу определяется знак отклонения скорости от заданной, а модуль отклонения определяется в об- ратном коде.
Предположим, что скорость вращени электродвигателя меньше требуемого значения, определяемого частотой опоного генератора, поэтому изменение кода счетчика 4 идет .медленнее, чем. счетчика 3.
0
Изменение i-разрядных кодов счетчиков 3 и 4 приведены на фиг. 2 (d ид). Счетчик 3 ведет прямой счет, счетчик 4 - обратный счет.
Допустим до момента времени tj состояние выходов триггеров разового дискриминатора Q (j 1; Qg 1.. Сигналы OQ, Qg используются В качестве
старших разрядов кодов счетчиков 3 и 4 при сложении на сумматоре. На фиг. 2 ( аи е) изображено изменение кодов с учетом сигналов , в качестве старших разрядов. На диаграммах о и г приведены выходные сигналы
фазового дискриминатора 0„, 0„. Триггеры 8 и 9 переключаются в
единичное состояние по положительному перепаду сигналов, снимаемых с
0 разрядов счетчиков. Для работы триггера 9 используется инверсный сигнал i-ro разряда счетчика 3. На диаграмме Ж (фиг. 2) приведен результат суммирования кодов, приве5 денных на диаграммах Ч и е . На диаграмме 5- приведен сигнал знака отклонения, снимаемого с (i+2)-ro разряда сумматора, формируемый при сложении кода, приведенного на диаграмме Ж,
0 с логической единицей, учитывающей отрицательный знак обратного кода счетчика 4. На диаграмме U приведен результат суммирования (i+2)-разрядного кода на выходах преобразователя кодов, на диаграмме к - изменение
скорости электродвигателя.
I
В момент t переключений в фазовом
дискриминаторе не происходит, очеред- д ной импульс со счетчика 3 подтвержда- рт состояние 0 1. В момент t- по положительному перепаду о счетчика 4 происходит переключение 0 в состояО
ние нуля. На входах схемы 10 совпа- с дения появляется комбинация сигналов Q С) Qg 1, которой соответствует сигнал 1, который устанавливает Q, Qg в нулевое состояние (а П 1).
Отрицательный импульс, формируемый Q на выходе Q, определяется частотными свойствами применяемых микросхем и практически не превышает 1 мкс, частота переключения i-x разрядов счетчиков находится в пределах 0-100 Гц, поэтому переходные состояния изображены в виде просадок, которые не -влияют на процесс измерения отклонения скорости. На диаграммах К и U (фиг.2) отсутствует скачкообразное изменение
516
кода в момент t , характерное для t. Это объясняется взаимокомпенсацией перепадов кодов на диаграммах И и е .
Скорость двигателя продолжает увеличиваться медленнее (фиг. 2К), медленнее увеличиваются и величины кодов на диаграммах Ж и U . Процесс переключения Q, (а продолжается : с приходом перепада со счетчика 3 на Qn появляется состояние единицы, а с приходом перепада со счетчика 4 появляется нуль, с выхода продолжает сниматься единица с просадками.
Это продолжается до момента време- ни t, когда вследствие увеличения частоты вращения электродвигателя соотношение между частотами перепадов
изменяется, и на интервале
Ч -&
появляются два перепада кода счетчиt-,
ка 4 в моменты и
7Начиная с момента времени t, встпает в работу 8. По перепаду счетчика 4 выход Og обнуляется, с приходом перепада со счетчика 3 устанавливается в единицу.
На диаграмме Ж приведен уровень переполнения (с помощью штриховой линии) (i+1)-ro разряда сумматора. При сложении кода (фиг. 2u) с единицей в (i+2)-M разряде сумматора формируется сигнал (i+2)-ro разряда сумматора который используется в качестве сигнала знака отклонения. Сигнал переноса соответствует инверсному от сигнала, приведенного на диаграмме j, .
В соответствии с правилами сложения кодов в параллельном обратном коде осуществляется операция циклического переноса из самого старшего (i+2)-ro разряда сумматора в самый мпадший. Сумма на выходе су мматора получается в обратном коде, который надо преобразовать в прямой. Сигнал узнака снимается с (i+2)-го разряда сумматора.
При наличии переноса этому моменту соответствует логический нуль на диаграмме Я - сумма положительна и ее обратный код совпадает с прямым. В этом случае преобразователь кода пропускает сумму на выход устройства без изменения.
При получении отрицательной суммы преобразователь кода инвертирует сигналы, снимаемые с всех выходных разрядов сумматора. Б результате на выходе преобразователя кода появляется код отклонения в прямом коде
15620
(фиг. 2и), а также сигнал знаКа отклонения (фиг. 2г,) . Преобразователь кода выполнен на элементах ИСКЛЮЧАЮЩЕЕ ИЛ-. Если скорость двигателя опять возрастает, то на участке t,n возникают два перепа да кода счетчика 3 (, t) вследствие чего вступает в работу триггер 9. Код отклоне- 4Q ния изменяет свой знак. Таким образом формируется код отклонения ско-. рости от заданной.
5
0
5
0
5
0
5
0
5
Формула изобретения
1.Способ цифрового измерения отклонения скорости от заданной, заключающийся в формировании последова- гельности импульсов опорной частоты и импульсов, поступающих с датчика скорости, определении углового рассогласования между задающим валом и регу- лируемым и представлении результата
в виде параллельного двоичного кода, отличающийся тем, что, с целью повышения точности измерения, определение углов поворота задающего и регулируемого валов производят раздельно, при ВТОМ отклонение скорости от заданной определяют в обратном коде, дополнительно по перепадам- кодов формируют сигналы фазового рассогласования, которые суммируют с сигналом переноса,- формируемым при определении углового рассогласования, и по результирующему сигналу определяют знак отклонения скорости от заданной.
2.Устройство для цифрового изме рения отклонения скорости от заданной содержащее опорный генератор, датчик скорости, счетчик и элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, причем выход опорного генератора соединен с входом счетчика, а выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ является выходом устройства, о т л и ч а- ю щ е е с я тем, что, с целью повышения точности измерения,в него введены второй счетчик, сумматор, два D-триггера и схему совпадения, причем выход датчика скорости соединен
с входом второго счетчика, выходы обоих счетчиков соединены с первым и вторым входами сумматора соответственно, выходы старших разрядов счетчиков соединены с входами первого и второго D-триггеров соответственно, прямой и инверсный выходы которых соединены с предпоследними разрядами первого и второго входов сумматора соотвфтственно, первый и второй входы сх MEfr совпадения соединены с прямыми вы первого и второго D-триггеров
соответственно, а выход схемы совпади - 1
ния соединен с входами сброса D- Т1ИГГеров,-при этом информационные оды первого и второго D-триггеров, также старший разряд второго входа сумматора соединены с шинсй логичесBJ
кой единицы, а старший разряд первого входа сумматора соединен с шиной логического нуля, выходы сумматора соединены с входами элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, старший разряд выхода сумматора соединен также со знаковым выходом устройства, выход переполнения сумматора, соединен с его же входом переноса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Цифровой фазометр мгновенных значений | 1986 |
|
SU1348745A2 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Устройство для автоподстройки фазы тактовых импульсов | 1990 |
|
SU1811017A1 |
| Формирователь сигналов с заданным законом изменения фазы | 1986 |
|
SU1385239A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |
| Устройство для считывания графической информации | 1982 |
|
SU1018136A1 |
| УСТРОЙСТВО ФАЗИРОВАНИЯ ШКАЛЫ ВРЕМЕНИ ЭЛЕКТРОННЫХ ЧАСОВ | 1994 |
|
RU2084944C1 |
| Преобразователь код-угол | 1980 |
|
SU858053A1 |
| Электропривод | 1987 |
|
SU1453569A1 |
Изобретение относится к измерениям параметров движения и может быть использовано для измерения отклонения скорости от заданной путем сравнения углов поворота задающего и регулируемого валов. Целью изобретения является повышение точности измерения. Величины углов определяют в виде двоичного параллельного кода, сравнение осуществляется в обратном коде с помощью сумматора. Дополнительно по перепадам кодов формируют сигналы фазового рассогласования, которые суммируются с сигналом переноса, формируемым при определении углового рассогласования, по результирующему сигналу определяют знак отклонения скорости от заданной. Устройство содержит опорный генератор 1, датчик скорости электродвигателя 2, счетчик 3 прямого счета, счетчик 4 обратного счета, фазовый дискриминатор 5, сумматор 6, преобразователь кода 7. 2 с.п. ф-лы, 2 ил.
..±П
1 I
и
АГ
J
