Изобретение относится к гидротехническим сооружениям, в частности к устройствам управления электрогидравлическим приводом затвора гидротехнического сооружения, и может быть использовано для управления синхронным движением электроприводов, работающих на общую нагрузку.
Цель изобретения - улучшение эксплуатационных характеристик гидропривода.
В способе управления и синхронизации информационный сигнал разделяют соответственно знаку фазы этого сигнала и инвертируют составляющие этого сигнала для одной из кромок гидротехнического затвора. Затем устанавливают заданные значения и фазу этого сигнала, суммируют их с соответствующими частями информационного сигнала. В зависимости от характеристик суммарного сигнала осуществляют подачу дополнительного регулируемого расхода в магистраль, связанную со штоко- вой полостью гидроподъемника соответствующей кромки, до момента равенства нулю параметров информационого сигнала. На фиг. 1 представлена блок-схема синхронизированного гидропривода затвора шлюза; на фиг. 2 - электрическая схема фа- зочувствительного устройства; на фиг. 3 - выходная характеристика фазочувствитеяь- ного устройства.
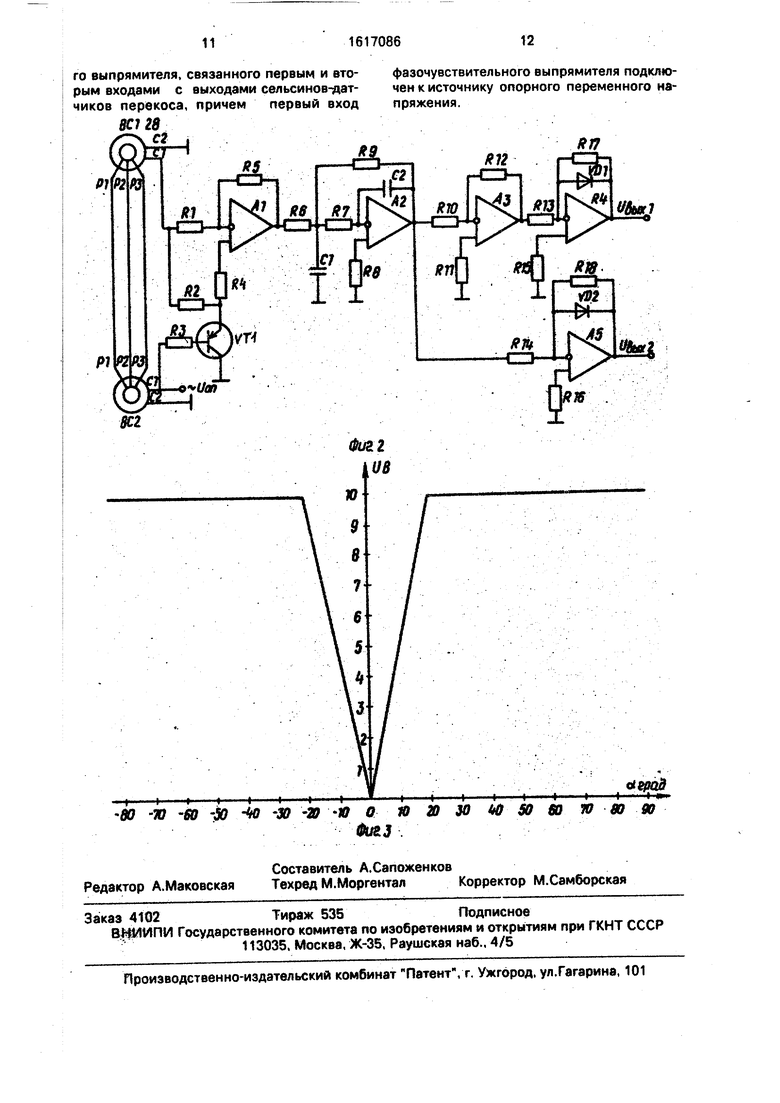
Устройство (фиг. 1) содержит два автономных гидроподъемника 1 и 2, каждый из которых содержит обратный управляемый клапан 3, надклапанная полость 4 которого гидравлически соединена со штоковой полостью 5 гидроподъемников 1 и 2. Подкла- панная полость 6 клапана 3 гидравлически соединена с регулируемым дросселем 7, выход которого связан со сливным золотником 8, а такжа обратным клапаном 9 и насосной станцией 10 высокого давления, к которой подключены фильтр 11, обратный клапан 12 и предохранительный клапан 13. Управляющая полость 14 обратного управляемого клапана 3 и управляющая полость 15 сливного золотника 8 подключены гидравлически к электромагнитным распределителям 0 16 и 17, к которым подводится рабочая жидкость от насосной станции 18 низкого давления, к которой подключены фильтр 19 и напорный золотник 20, поддерживающий установленное давление рабочей жидкости. 5 Питание насосных станций 10 и 18 осуществляется от баков 21. Сливной золотник 8 своим выходом соединен гидравлически с поршневой полостью 22 гидроподъемников 1 и 2. Обратный клапан 9 гидравлически 0 соединен с напорной магистралью насоса 23, производительность которой изменяется регулируемым приводным электродвигателем 24 со стабилизацией частоты вращения и задатчиком интенсивности, ме- 5 ханически связанным с насосом 23 и электрически подключенным к блоку 25 управления электродвигателем, электрически соединенным с сумматором 26, при этом питание насоса 23 осуществляется от
0 бака 21.
Для синхронизации движения штоков 27 гидроподъемников 1 и 2 в схему включены два сельсина-датчика 28 перекоса, валы которых механически связаны с цилиндри35 ческими редукторами 29. связанными тросовой передачей 30 со штоками 27 гидроподъемников 1 и 2, шарнирно соединенных с затвором 31. Сельсины 28 электри- иески соединены между собой по
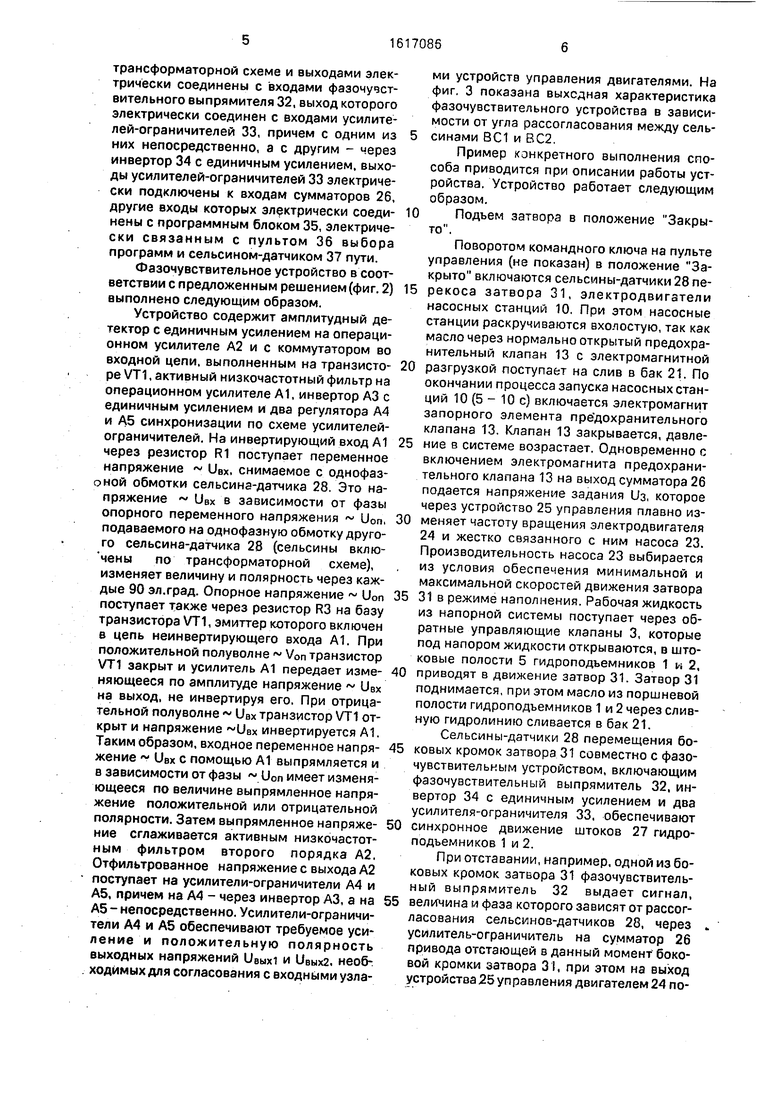
трансформаторной схеме и выходами электрически соединены с входами фазочувст- вительного выпрямителя 32. выход которого электрически соединен с входами усилителей-ограничителей 33, причем с одним из них непосредственно, а с другим - через инвертор 34 с единичным усилением, выходы усилителей-ограничителей 33 электрически подключены к входам сумматоров 26, другие входы которых электрически соединены с программным блоком 35, электрически связанным с пультом 36 выбора программ и сельсином-датчиком 37 пути.
Фазочувствительное устройство в соответствии с предложенным решением (фиг. 2) выполнено следующим образом.
Устройство содержит амплитудный детектор с единичным усилением на операционном усилителе А2 и с коммутатором во входной цепи, выполненным на транзисторе VT1, активный низкочастотный фильтр на операционном усилителе А1, инвертор A3 с единичным усилением и два регулятора М и А5 синхронизации по схеме усилителей- ограничителей. На инвертирующий вход А1 через резистор R1 поступает переменное напряжение «v UBX. снимаемое с однофаз- оной обмотки сельсина-датчика 28. Это напряжение UBX в зависимости от фазы опорного переменного напряжения Uon, подаваемого на однофазную обмотку другого сельсина-датчика 28 (сельсины включены по трансформаторной схеме), изменяет величину и полярность через каждые 90 эл.град. Опорное напряжение Uon поступает также через резистор R3 на базу транзистора VT1, эмиттер которого включен в цепь неинвертирующего входа А1. При положительной полуволне Von транзистор VT1 закрыт и усилитель А1 передает изменяющееся по амплитуде напряжение UBX на выход, не инвертируя его. При отрицательной полуволне UBX транзистор VT1 открыт и напряжение UBX инвертируется А1. Таким образом, входное переменное напряжение UBX с помощью А1 выпрямляется и в зависимости от фазы Uon имеет изменяющееся по величине выпрямленное напряжение положительной или отрицательной полярности. Затем выпрямленное напряжение сглаживается активным низкочастотным фильтром второго порядка А2. Отфильтрованное напряжение с выхода А2 поступает на усилители-ограничители А4 и А5, причем на А4 - через инвертор A3, а на А5 - непосредственно. Усилители-ограничители А4 и А5 обеспечивают требуемое усиление и положительную полярность выходных напряжений UBBIXI и ивых2. необходимых для согласования с входными узла
4 50
55
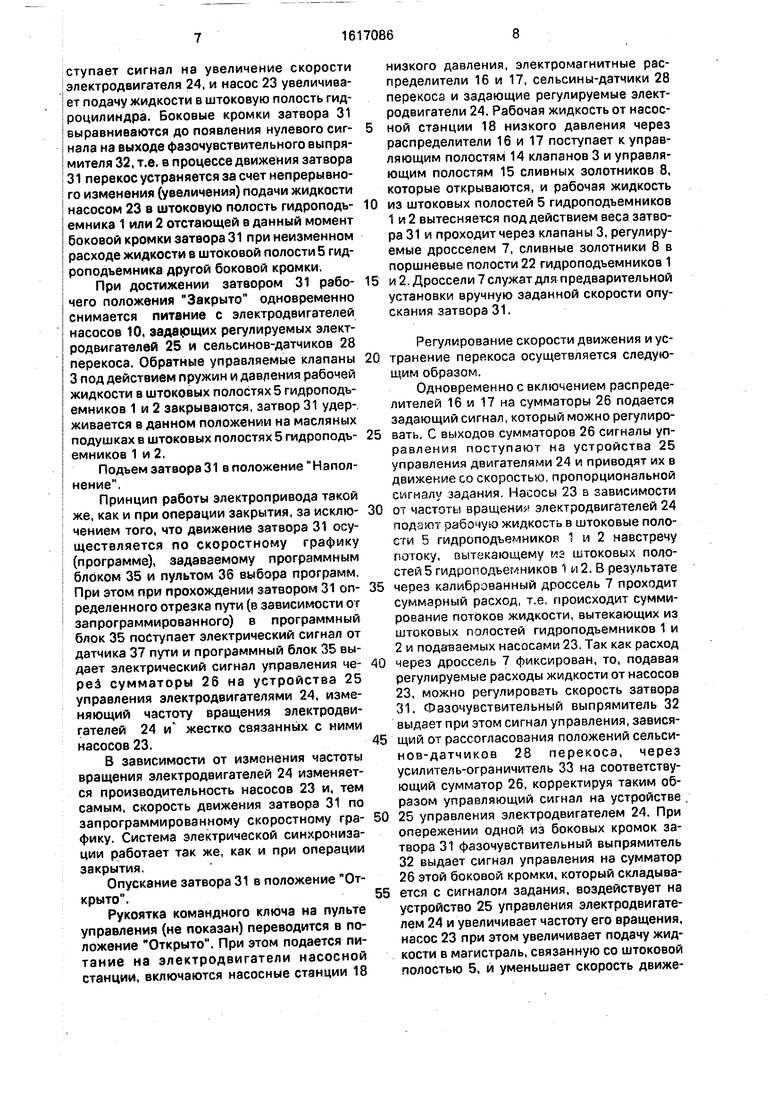
ми устройств управления двигателями. На фиг. 3 показана выходная характеристика Фазочувствительного устройства в зависимости от угла рассогласования между сель- 5 синами ВС1 и ВС2.
Пример конкретного выполнения способа приводится при описании работы устройства. Устройство работает следующим образом.
10 Подъем затвора в положение ЗакрыПоворотом командного ключа на пульте управления (не показан) в положение За- крыто включаются сельсины-датчики 28 пе- 15 рекоса затвора 31, электродвигатели насосных станций 10. При этом насосные станции раскручиваются вхолостую, так как масло через нормально открытый предохра- нительный клапан 13 с электромагнитной 20 разгрузкой поступает на слив в бак 21 По окончании процесса запуска насосных станций 10 (5 - 10 с) включается электромагнит запорного элемента предохранительного клапана 13. Клапан 13 закрывается, давле- 5 ние в системе возрастает. Одновременно с включением электромагнита предохранительного клапана 13 на выход сумматора 26 подается напряжение задания Us, которое через устройство 25 управления плавно из- O меняет частоту вращения электродвигателя 24 и жестко связанного с ним насоса 23 Производительность насоса 23 выбирается из условия обеспечения минимальной и максимальной скоростей движения затвора 5 31 в режиме наполнения. Рабочая жидкость из напорной системы поступает через обратные управляющие клапаны 3, которые под напором жидкости открываются, в што- ковые полости 5 гидроподъемников 1 и 2. приводят в движение затвор 31. Затвор 31 поднимается, при этом масло из поршневой полости гидроподъемников 1 и 2 через сливную гидролинию сливается в бак 21.
Сельсины-датчики 28 перемещения бо- ковых кромок затвора 31 совместно с фазо- чувствительным устройством, включающим фазочувствительный выпрямитель 32. инвертор 34 с единичным усилением и два усилителя-ограничителя 33. обеспечивают синхронное движение штоков 27 гидроподъемников 1 и 2.
При отставании, например, одной из боковых кромок затвора 31 фазочувствитель- ный выпрямитель 32 выдает сигнал. величина и фаза которого зависят от рассогласования сельсинов-датчиков 28. через усилитель-ограничитель на сумматор 26 привода отстающей в данный момент боковой кромки затвора 31. при этом на выход устройства 25 управления двигателем 24 поступает сигнал на увеличение скорости электродвигателя 24. и насос 23 увеличивает подачу жидкости в штоковую полость гидроцилиндра. Боковые кромки затвора 31 выравниваются до появления нулевого сиг- нала на выходе фазочувствительного выпрямителя 32. т.е. в процессе движения затвора 31 перекос устраняется за счет непрерывного измен ения (увеличения) подачи жидкости насосом 23 в штоковую полость гидроподъ- емника 1 или 2 отстающей в данный момент боковой кромки затвора 31 при неизменном расходе жидкости в штоковой полости 5 гидроподъемника другой боковой кромки.
При достижении затвором 31 рабо- чего положения Закрыто одновременно снимается питание с электродвигателей насосов to, задающих регулируемых электродвигателей 25 и сельсинов-датчиков 28 перекоса. Обратные управляемые клапаны 3 под действием пружин и давления рабочей жидкости в штоковых полостях 5 гидроподъемников 1 и 2 закрываются, затвор 31 удерживается в данном положении на масляных подушках в штоковых полостях 5 гидроподъ- емников1 и 2.
Подъем затвора 31 в положение Наполнение.
Принцип работы электропривода такой же. как и при операции закрытия, за исклю- чением того, что движение затвора 31 осуществляется по скоростному графику (программе), задаваемому программным блоком 35 и пультом 36 выбора программ. При этом при прохождении затвором 31 оп- ределенного отрезка пути (в зависимости от запрограммированного) в программный блок 35 поступает электрический сигнал от датчика 37 пути и программный блок 35 выдает электрический сигнал управления че- рей сумматоры 26 на устройства 25 управления электродвигателями 24, изменяющий частоту вращения электродвигателей 24 и° жестко связанных с ними насосов 23.
В зависимости от изменения частоты вращения электродвигателей 24 изменяется производительность насосов 23 и. тем самым, скорость движения затвора 31 по запрограммированному скоростному гра- фику. Система электрической синхронизации работает так же. как и при операции закрытия.
Опускание затвора 31 в положение Открыто.
Рукоятка командного ключа на пульте управления (не показан) переводится в положение Открыто. При этом подается питание на электродвигатели насосной станции, включаются насосные станции 18
низкого давления, электромагнитные распределители 16 и 17. сельсины-датчики 28 перекоса и задающие регулируемые электродвигатели 24. Рабочая жидкость от насосной станции 18 низкого давления через распределители 16 и 17 поступает к управляющим полостям 14 клапанов 3 и управляющим полостям 15 сливных золотников 8, которые открываются, и рабочая жидкость из штоковых полостей 5 гидроподъемников 1 и 2 вытесняется под действием веса затвора 31 и проходит через клапаны 3, регулируемые дросселем 7. сливные золотники 8 в поршневые полости 22 гидроподъемников 1 и 2. Дроссели 7 служат для предварительной установки вручную заданной скорости опускания затвора 31.
Регулирование скорости движения и устранение перекоса осущетвляется следующим образом.
Одновременно с включением распределителей 16 и 17 на сумматоры 26 подается задающий сигнал, который можно регулировать. С выходов сумматоров 26 сигналы управления поступают на устройства 25 управления двигателями 24 и приводят их в движение со скоростью, пропорциональной сигналу задания, Насосы 23 в зависимости от частоты вращения электродвигателей 24 подают рабочую жидкость в штоковые полости 5 гидроподъемников 1 и 2 навстречу потоку, вытекающему иэ штоковых полостей 5 гидроподъемников 1 и 2.В результате через калиброванный дроссель 7 проходит суммарный расход, т.е. происходит суммирование пот(эков жидкости, вытекающих из штоковых полостей гидроподъемников 1 и 2 и подаваемых насосами 23. Так как расход через дроссель 7 фиксирован, то, подавая регулируемые расходы жидкости от насосов 23, можно регулировать скорость затвора 31. Фазочувствительный выпрямитель 32 выдает при этом сигнал управления, зависящий от рассогласования положений сельси- нов-датчиков 28 перекоса, через усилитель-ограничитель 33 на соответствующий сумматор 26. корректируя таким образом управляющий сигнал на устройстве
25управления электродвигателем 24. При опережении одной из боковых кромок затвора 31 фазочувствительный выпрямитель 32 выдает сигнал управления на сумматор
26этой боковой кромки, который складывается с сигналом задания, воздействует на устройство 25 управления электродвигателем 24 и увеличивает частоту его вращения, насос 23 при этом увеличивает подачу жидкости в магистраль, связанную со штоковой полостью 5, и уменьшает скорость движения данной опережающей кромки затвора 31.
Боковые кромки затвора 31 начинают выравниваться до появления нулевого сигнала рассогласования на выходе фазочув- ствительного выпрямителя 32. При достижении затвором 31 конечного положения Открыто снимается питание с электродвигателей насосной станции 18. электромагнитных распределителей 16 и 17, задающих регулируемых электродвигателей 24 и сельсинов-датчиков 28 перекоса.
Распределители 16 и 17 сообщают управляющие полости 14 клапанов 3 и управляющие полости 15 сливных золотников 8 со сливом. В результате под действием пружин клапаны 3 и сливные золотники 8 закрываются. Затвор 31 удерживается в заданном положении на масляных подушках в штоко- вых полостях 5 гидроподъемников 1 и 2.
Формула изобретения 1. Способ управления и синхронизации движения гидротехнического затвора, включающий подачу и слив жидкости из штоковых полостей гидроподъемников правой и левой кромок затвора соответственно три подъеме и опускании затвора, определение положения кромок затвора, формирование информационного сигнала, соответствующего рассогласованию положения кромок затвора, с последующей корректировкой расхода подаваемой и сливаемой жидкости, отличающийся тем, что, с целью улучшения зксплуатацион- ных характеристик гидропривода, информационный сигнал разделяют, соответственно знаку фазы этого сигнала, инвертируют составляющие этого сигнала для одной из кромок гидротехнического затвора, уста- навливают заданные значения и фазу данного сигнала, суммируют их с соответствующими частями информационного сигнала и в зависимости от характеристик суммарного сигнала осуществляют подачу дополнительного регулируемого расхода в магистраль, связанную со штоко- вой полостью гидроподъемника соответствующей кромки до момента равенства нулю параметров информационного сигнала.
2. Устройство для управления и синхронизации движения гидротехнического затвора, включающее два автономных гидроподъемника, каждый из которых содержит обратный управляемый, первый обратный неуправляемый и предохранительный клапаны, сливной и напорный золотники, регулируемый дроссель, первый и второй электромагнитные распределители, насосные станции высокого и низкого давления с фильтрами в напорных линиях, цилиндрический редуктор, снабженный сельсин-датчиками перекоса и датчиком пути и связанный посредством тросовой связи со штоком гидроподьемника, задающий ре гулируемый электродвигатель, программный блок и пульт выбора программы, причем надклапанной полостью обратный управляемый клапан подключен к штоковой полости гидроподъемника, а подклапан- ной полостью связан с напорной линией насосной станции высокого давления, предохранительным клапаном и через руемый дроссель - с входом сливного золотника, выход которого подключен к поршневой полости гидроподъемника, при этом управляющая полость сливного золотника сообщена с полостью управления первого электромагнитного распределителя, полость питания которого через напорный золотник подключена к напорной линии насосной станции низкого давления и полости питания второго электромагнитного распределителя, при этом полость управления последнего связана с полостью управления обратного управляемого клапана, причем выход пульта выбора программы соединен с первым входом программного блока, первый и второй выходы которого подключены к соответствующим клеммам задающих регулируемых электродвигателей, а третьим выходом - к датчику пути, отличающееся тем, что, с целью улучшения эксплуатационных характеристик гидропривода, оно оснащено источником опорного напряжения, инвертором, фазо- чувствительным выпрямителем, при этом каждый из автономных гидроподъемников снабжен вторым обратным неуправляемым клапаном, насосом, блоком управления, задающим регулируемым электродвигателем, сумматорами и усилителем-ограничителеМ, при этим второй обратный неуправляемый клапан выходом подключен к гидролинии, соединяющей обратный управляемый клапан и регулируемый дроссель, а входом связан с напорной гидролинией насоса, всасывающая гидролиния которого сообщена с баком, причем ось несоса механически связана с выходным валом задающего- регулируемого электродвигателя, а вход блока управления задающим регулируемым электродвигателем подключен к выходу сумматора, один из входов которого соединен с вторым выходом программного блока, а другой - с выходом соответствующего усилителя-ограничителя, при этом вход одного из усилителей-ограничителей соединен непосредственно, а другого - через инвертор с выходом фазочувствительного выпрямителя, связанного первым и вторым входами с выходами сельсинов-датчиков перекоса, причем первый вход
КП8
сг
фазочувствительного выпрямителя подключен к источнику опорного переменного напряжения.
КГ7

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1749361A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Сегментный затвор с системой гидроприводов | 2023 |
|
RU2830615C2 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1234515A1 |
Изобретение относится к гидротехническим сооружениям, в частности к устройствам управления электрогидравлическим приводом затвора гидротехнического сооружения, и может быть использовано для управления синхронным движением электрогидроприводов, работающих на общую нагрузку. Цель изобретения - улучшение эксплуатационных характеристик гидропривода. Для осуществления способа устройство содержит два автономных гидроподъемника 1 и 2, каждый из которых включает обратный клапан 3, надклапанная полость 4 которого гидравлически соединена со штоковой полостью 5 гидроподъемников 1 и 2. Подклапанная полость 6 клапана 3 гидравлически соединена с регулируемым дросселем 7, сливным золотником 8, обратным клапаном 9 и насосной станцией 10 высокого давления, к которой подключены фильтры 11, обратный клапан 12 и предохранительный клапан 13. Управляющая полость 14 обратного управляемого клапана 3 и управляющая полость 15 сливного золотника 8 подключены к электромагнитным распределителям 16 и 17, к которым подводится рабочая жидкость от насосной станции 18, соединенной с фильтром 19 и напорным золотником 20. Питание насосных станций 10 и 18 осуществляется от баков 21. Сливной золотник 8 соединен с поршневой полостью 22, а обратный клапан 9 - с напорной магистралью насосов 23, работающих от электродвигателей 24, подключенных к блоку управления 25, вход которого связан с сумматором 26. Синхронизация движения штоков 27 задается сельсинами-датчиками 28, валы которых механически связаны с цилиндрическими редукторами 29, имеющими тросовую передачу 30 с затвором 31. Фазочувствительное устройство содержит фазочувствительный выпрямитель 32, усилитель-ограничитель 33 и инвертор 34. Выходы усилителей-ограничителей 33 электрически подключены к входам сумматоров 26, другие входы которых соединены с программным блоком 35, связанным с пультом 36 выбора программ и сельсином-датчиком 37 пути. 2 с.п.ф-лы, 3 ил.
црсй
