суммируется с входным сигналом, поступающим от программного устройства 23, в усилителе 11 гидроподъемника 1 и вычитается из второго сигнала в усилителе 11 гидроподъемника 2, а сигнал напряжения, снимаемый с потенциометра f5 гидроподъемника 2, подключен аналогично к усилителю 11 гидроподъемника 2 и усилителю 11 гидроподъемника 1.
Одновременно с цифроаналогового преобразователя 14 непрерывный сигнал напряжения, дважды дифференцируясь в дифференцирующих устройствах 20 и 19, поступает на входы электронных суммирующих усилителей 12 ка к сигнал заданного ускорения перемещения затвора 24, где алгебраически суммируется с сигналом, поступающим рт датчиков 18 ускорения, по мере движения затвора Таким образом реализуется обратная связь по ускорению. С усилителей 12 результирующий сигнал напряжения поступает на один из входов каждого усилителя 11.
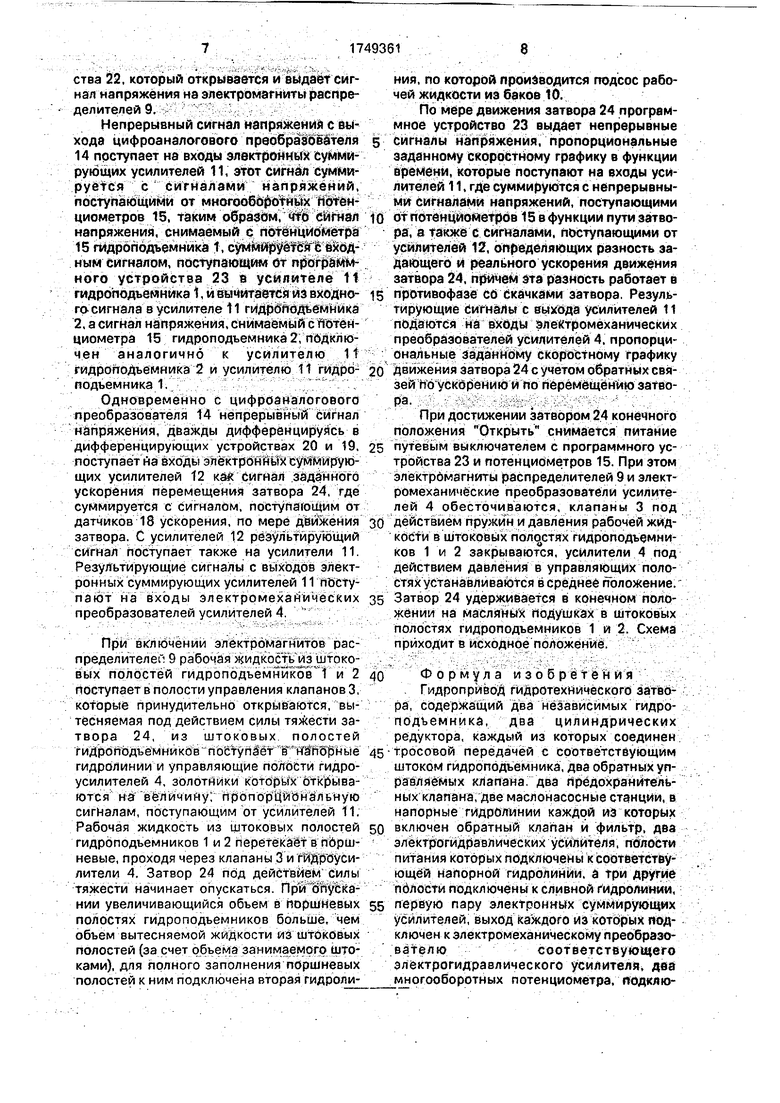
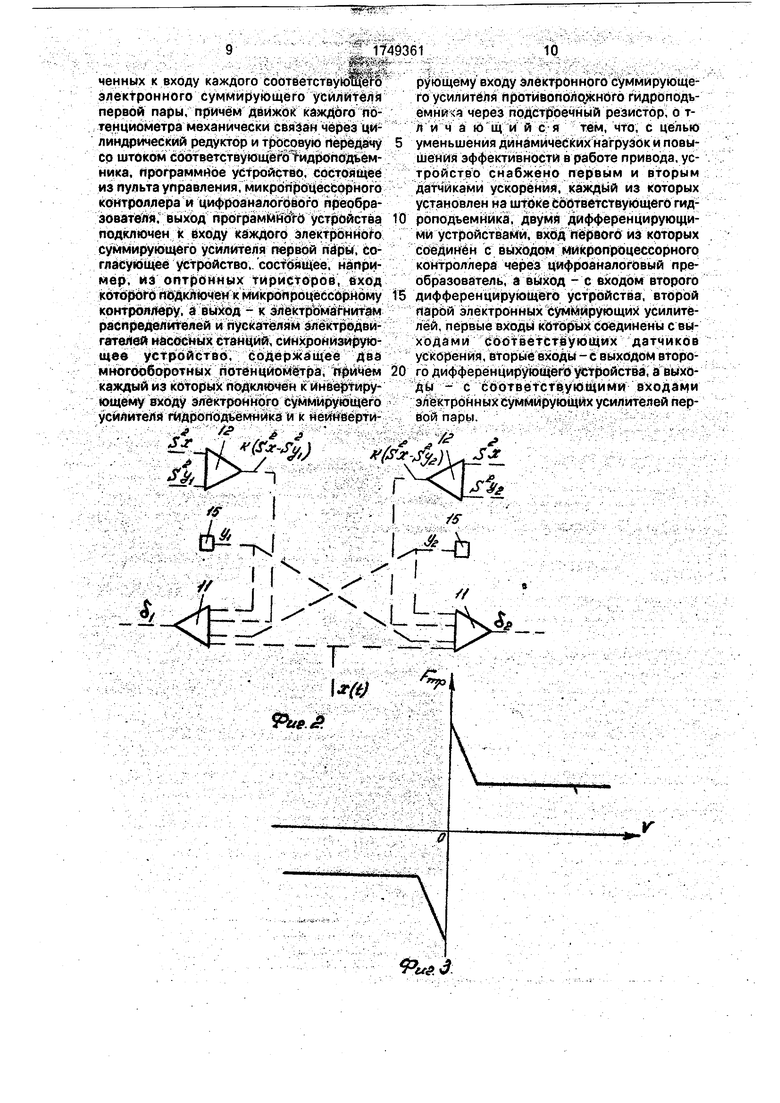
Суммарный сигнал от электрон ных суммирующих усилителей 11 (фиг.1) поступает на входы электромеханических преобразователей электрогидравлических усилителей 4. Как только насосы начнут подавать рабочую жидкость в напорную гидролинию, золотники усилителей 4 переместятся на величину, пропорциональную токовому сигналу, поступающему от электронных суммирующих усилителей 11, и часть расхода жидкости из напорной гидролинии через золотник усилителя 4 поступает в поршневые полости гидроподъемников 1 и 2, а из них - по сливным гидролиниям в баки 10 Другая часть рабочей жидкости из напорной гидролинии поступает через обратные управляющие клапаны 3 в штоковые полости гидроподъемников 1 и 2 приводя в движение затвор 24 с начальной заданной скоростью. По мере движения затвора 24 программное устройство 23 выдает непрерывные сигналы напряжения, пропорциональные заданному скоростному графику в функции от времени, которые поступают на входы усилителей 11, где суммируются с непрерывными сигналами напряжений, по- Ступающими от потенциометров 15 в функции пути затвора а также с сигналами, поступающими от усилителей 12, определяющих разность реального м задающего ускорения движения затвора, причем эта разность работает в противофазе со скачками затвора 24.
Результирующие токовые сигналы с усилителей 11 поступают на электромеханические преобразователи усилителей 4. вызывая смещение их золотников. В
результате электрогидравлические усилители 4 не только регулируют расход жидкости для обеспечения заданного скоростного графика движения затвора 24, но и отслеживают заданную скорость движения затвора, одновременно исключая его перекос
При достижении затвором 24 конечного положения Наполнение, снимается питание концевым выключателем, установлен0 ным на затворе 24, с программного устройства 23, потенциометров 15 и электродвигателей насосных станций 6. Клапаны 4 под действием пружин и давления рабочей жидкости в штоковых полостях гидроподъ5 емников 1 и 2 закрываются, золотники усилителей 4 под действием давления в управляющих полостях устанавливаются в среднее положение. Схема приходит в исходное состояние. Затвор 24 удерживается
0 в конечном положении на масляных подушках в штоковых полостях гидроподъемников 1 и 2.
Подъем затвора в положение Закрыть.
5 Эта операция осуществляется по одному оптимальному скоростному графику (программе). На пульте 21 управления (фиг 1) включается ключ данной операции, в результате чего подается сигнал на контрол0 лер 13, в котором записана программа этой технологической операции Затем включается ключ запуска контроллера 13 В контроллере формируются цифровые сигналы в соответствии с включенной программой В осталь5 ном принцип работы привода такой же как и при технологической операции Наполнение, но в работу включаются соответствующие насосы станции 6, обеспечивающие максимальную скорость движения затвора
0 в данной технологической операции
Опускание затвора в положение Открыть
Эта операция осуществляется по одному оптимальному скоростному графику
5 (программе). На пульте 21 управления (фиг 1) включается ключ данной операции, е результате чего подается сигнал на контроллер 13, в котором записана программа этой технологической операции Затем включа0 ется ключ запуска контроллера 13 В контроллере формируются цифровые сигналы в соответствии с включенной программой, которые подаются на дифроаналоговый преобразователь 14, где преобразовываются в
5 непрерывный сигнал напряжения, пропорциональный заданному закону перемещения затвора
Одновременно с выхода микропроцессорного контроллера 13 сигнал поступает на оптронный тиристор согласующего устройства 22, который открывается и выдает сигнал напряжения на электромагниты распределителей 9.
Непрерывный сигнал напряжений с выхода цифроаналогового преобразователя
14поступает на входы электронных суммирующих усилителей 11, этот сигнал сумми- руется с сигналами напряжений, поступающими от многооборотных потенциометров 15, таким образом, что Сигнал напряжения, снимаемый с потенциометра
15гидроподъемника 1, суммируется входным сигналом, поступающим от программного устройства 23 в усилителе If гидроподъемника 1, и вычитается из входного сигнала в усилителе 11 гидроподъемника 2, а сигнал напряжения, снимаемый с потенциометра 15 гидроподъемника 2, подключен аналогично к усилителю 11 гидроподъемника 2 и усилителю 11 гидроподъемника 1,
Одновременно с цифроаналогового преобразователя 14 непрерывный сигнал напряжения, дважды дифференцируясь в дифференцирующих устройствах 20 и 19, поступает на входы электронных суМмирую- щих усилителей 12 ка сигнал заданного ускорения перемещения затвора 24, где суммируется с сигналом, поступающим от датчиков 18 ускорения, по мере движения затвора. С усилителей 12 результирующий сигнал поступает также на усилители 11 Результирующие сигналы с выходов электронных суммирующих усилителей 11 поступают на входы электромеханических преобразователей усилителей 4
При включении электромагнитов распре делите лег 9 рабочая жидкость из штоко- вых полостей гидроподъемников t и 2 поступает в полости управления клапанов 3, которые принудительно открываются, вытесняемая под действием силы тяжести затвора 24, из штоковых полостей гидроподъемников поступает в нИШржые гидролинии и управляющие полости гидроусилителей 4, золотники которых открываются на величину, пропорциональную сигналам, поступающим от усилителей 11. Рабочая жидкость из штоковых полостей гидроподъемников 1 и 2 перетекает в пбрш- невые, проходя через клапаны 3 и гидроусилители 4. Затвор 24 под действием силы тяжести начинает опускаться При опускании увеличивающийся объем в поршневых полостях гидроподъемников больше, чем объем вытесняемой жидкости из штоковых полостей (за счет объема занимаемого штоками), для полного заполнения поршневых полостей к ним подключена вторая гидролиния, по которой производится подсос рабочей жидкости из баков 10.
По мере движения затвора 24 программное устройство 23 выдает непрерывные
сигналы напряжения, пропорциональные заданному скоростному графику в функции времени, которые поступают на входы усилителей 11, где суммируются с непрерывными сигналами напряжений, поступающими
от потенциометров 15 в функции пути затвора, а также с сигналами, поступающими от усилителей 12, определяющих разность задающего и реального ускорения движения затвора 24, причем эта разность работает в
противофазе со скачками затвора Результирующие Сигналы с выхода усилителей 11 подаются на входы электромеханических преобразователей усилителей 4, пропорциональные заданйому скоростному графику
движения затвора 24 с учетом обратных связей ho ускорению и по перемещению затвора.
При достижении затвором 24 конечного положения Открыть снимается питание
путевым выключателем с программного устройства 23 и потенциометров 15. При этом электрбмагниты распределителей 9 и электромеханические преобразователи усилителей 4 обесточиваются, клапаны 3 под
действием пружин и давления рабочей жидкости в штоковых полостях гидроподъемников 1 и 2 закрываются, усилители 4 под действием давления в управляющих полостях устанавливаются в среднее положение.
Затвор 24 удерживается в конечном положении на масляных подушках в штоковых полостях гидроподъемников 1 и 2. Схема приходит в исходное положение.
Формула изобретения
Гидропривод гидротехнического затвора, содержащий два независимых гидроподъемника, два цилиндрических редуктора, каждый из которых соединен
тросовой передачей с соответствующим штоком гидроподъемника, два обратных управляемых клапана два предохранительных клапана, две маслонасосные станции, в напорные гидролинии каждой из которых
включен обратный клапан и фильтр, два электрогидравлических усилителя, полости питания которых подключены к соответствующей напорной гидролинии, а три другие пблости подключены к сливной гидролмнии,
первую пару электронных суммирующих усилителей, выход каждого из которых подключен к электромеханическому преобразо- вателюсоответствующего
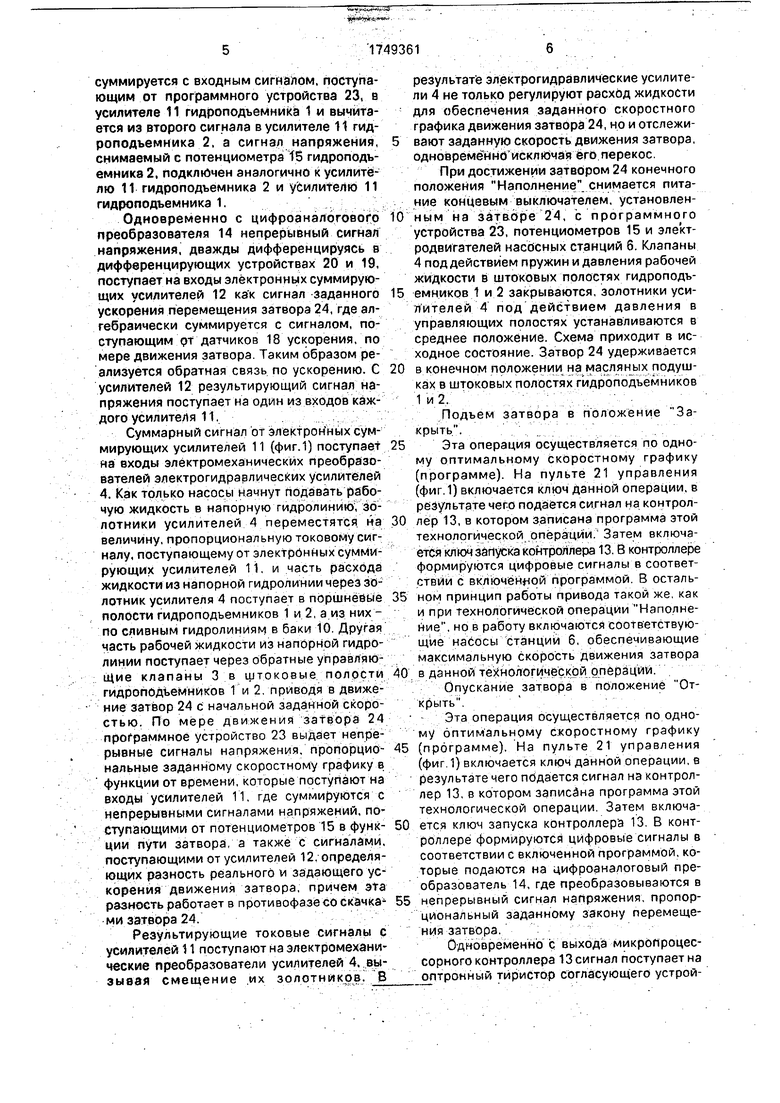
электрогидравлического усилителя, два многооборотных потенциометра, подкяюценных к входу каждого соответствую электронного суммирующего усилителя первой пары, причем движок каждого потенциометра механически связан через цилиндрический редуктор и тросовую передачу со штоком соответствующегоТгидроподьем- ника, программное устройство, состоящее из пульта управления, микропроцессорного контроллера и цифроаналогового преобразователя, выход программного устройства подключен к входу каждого электронного суммирующего усилителя первой пары, согласующее устройство, состоящее, например, из оптронных тиристоров, вход которого подключен к микропроцессорному контроллеру, а выход - к электромагнитам распределителей и пускателям электродвигателей насосных станций, синхронизирующее устройство, содержащее два многооборотных потенциометра, причем каждый из которых подключен к инвертирующему входу электронного суммирующего усилителя гидроподъемника и к неинверти ЛоЧ
W / 2
-v-hi -, JV-i
Р
9361
10
рующему входу электронного суммирующего усилителя противоположного гидроподъемник через подстроенный резистор, о т- личающийся тем, что, с целью
5 уменьшения динамических нагрузок и повышения эффективности в работе привода, устройство снабжено первым и вторым датчиками ускорения, каждый из которых установлен на штоке соответствующего гид10 роподъемника, двумя дифференцирующими устройствами, вход первого из которых соединен с выходом микропроцессорного контроллера через цифроаналоговый преобразователь, а выход - с входом второго
15 дифференцирующего устройства, второй парой электронных суммирующих усилителей, первые входы которых соединены с выходами соответствующих датчиков ускорения, вторые входы - с выходом второ20 го дифференцирующего устройства, а выходы - с соответствующими входами электронных суммирующих усилителей первой пары.
/г
-&)
rXibA
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод гидротехнического затвора | 1984 |
|
SU1234515A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
Изобретение относится к системе гид- роавтоматики и может быть использовано в механическом оборудовании гидросооружений. Цель изобретения - уменьшение динамических нагрузок и повышение эффективности привода в работе. Гидропривод гидротехнического затвора имеет многооборотные потенциометры 15, связанные с контроллером 13 и передающие информацию о положении гидроподъемников 1 и 2. При работе последних информация о рассогласовании положения данных гидроподъемников 1 и 2 обрабатывается контроллером 13, который управляет работой электродвигателей насосных станций 6. 3 ил. , - ,: :
| Гидропривод гидротехнического затвора | 1984 |
|
SU1234515A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
