2. Гидропривод по п. 1, отличающийся тем, что синхронизирующее устройство движения штоков двух независимых гидроподъемников содержит два многооборотных нотенциометра, причем каждый потенциометр подключен к инвертируюп1ему входу
1
Изобретение относится к подъемным механизмам и предназначено для использования в гидравлических подъемниках затворов гидротехнических сооружений, в частности для программного управления подъемно- опускным затвором судоходного 1плюза, име- к)Н|его два независимых гидронод1 емника.
Цель изобретения - увеличение пропуск пой способности , повышение безопасности икчюзования судов за счет програм- inoi4) управления гидроприводом затвора во всех технологических операциях.
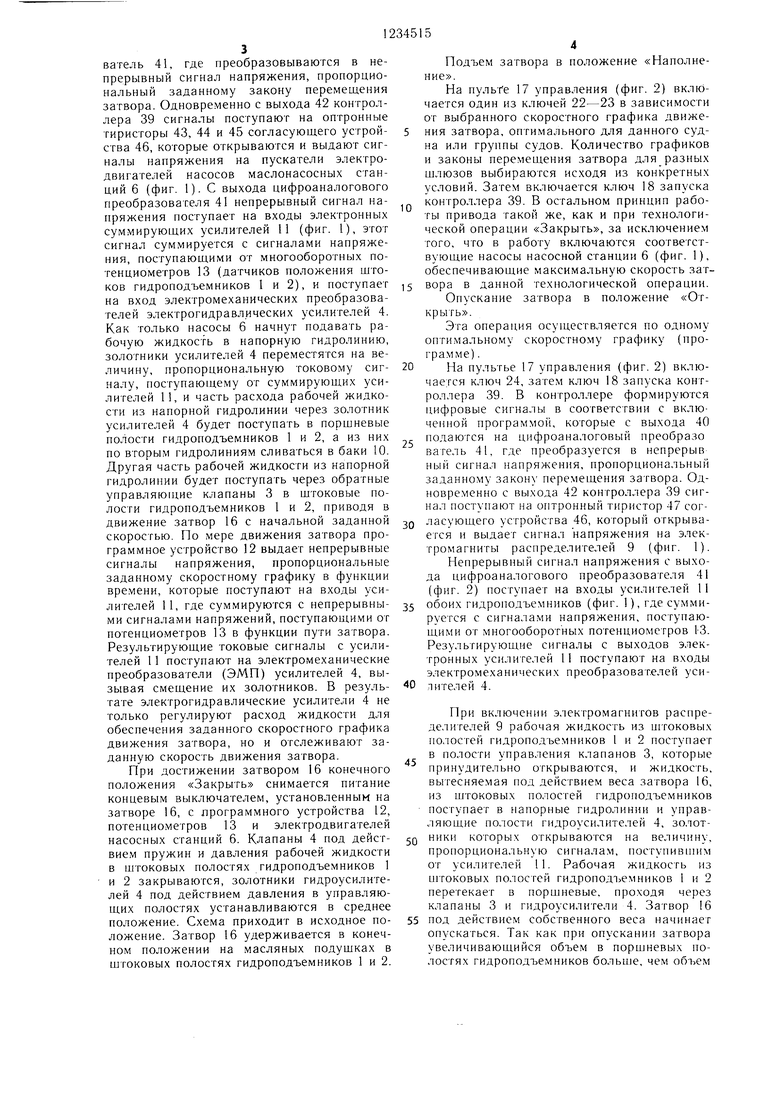
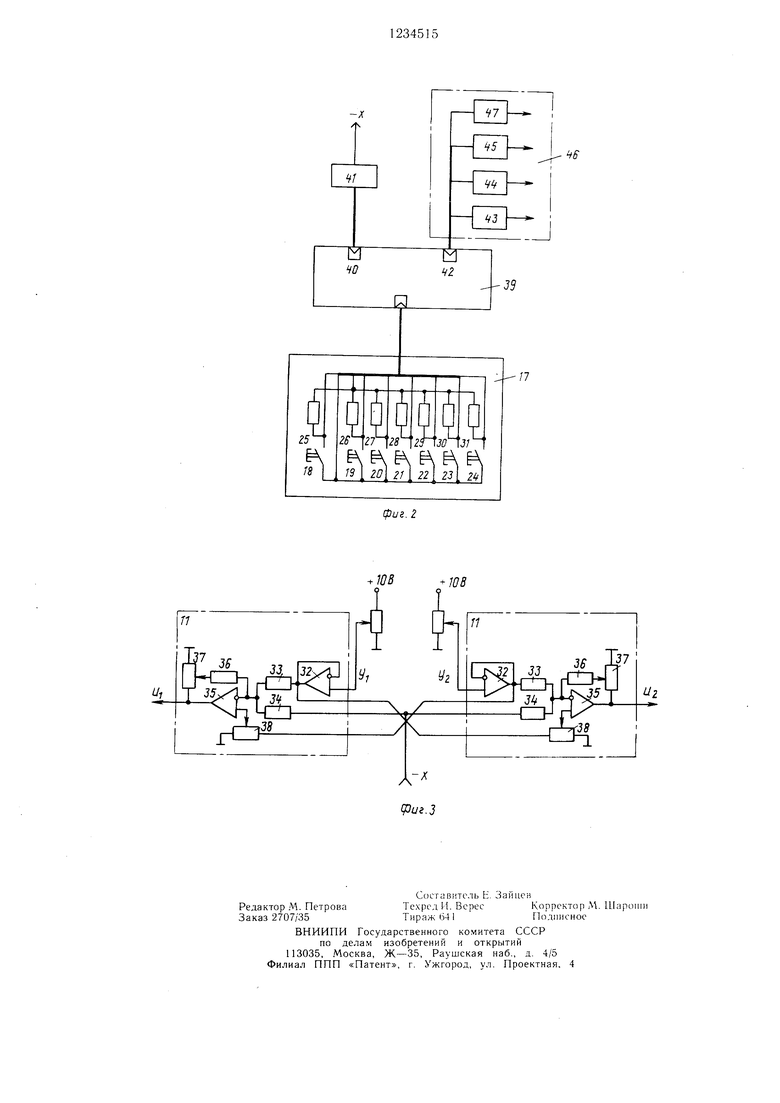
На фиг. 1 показана схема гидропривода гидротехнического затвора; на фиг. 2 пульт управления; на фиг. 3 - электронный суммирующий усилитель.
Каждый гидроподъемник 1 и 2 включает обратный управляемый клапан 3, на.л.кла- панная по;1ость которого соединена гидр(.- линией со пггоковой полостью гидроподъемника. Подклапанная полость клапана 3 соединена гидролиниями с электрогидравли- ческим усилителем 4, предохранительным кла- пано.м 5 и насосной станпией 6, в нанорную гидролипию которой включены обрат Пз1Й клапан 7, фильтр 8. Унравляюншя полосгь клапана 3 подк.лючена гидролинией к распределителю 9 с электромагнитным управлением, к которому подводится рабочая жидкость но гидролинии от 1птоковой полости гидроподъемника. Сливные гидролинии усилителя 4 сообщены с баком 10 через поршневую нолость гидронодъемника. Электромеханический преобразователь усилите.чя 4 каж дого гидроподъемника подключен к выходу электронного суммирующего усилителя 11, вход которого подключен к программному устройству 12 и мпогооборотным нотепцио- метрам 13, движки которых механически связаны через пилиндрические редукгоры 14 и ipocoBhiie передачи 15 со пггоками гидроподъемников. Штоки гидроподъемников 1 и 2 П1арнирно соединены с затвором 16.
Пульт 17 управления состоит из ключа 18 запуска микропроцессора и ключей 19-24 выбора скоростных графиков (количество ключей соответствует количеству скоростных графиков) движения затвора в технологических операциях. Параллельно ключам 19-24 подключены сопротивления 25-31 для повыщення помехоустойчивости
электронного суммируюпдего усилителя гидроподъемника и к неинвертирующему входу электронного суммирующего усилителя противоположного гидроподъемника через под- строечный резистор.
0 „
5
5
Электронный суммирующий усилитель 11 каждого гидроподъемпика 1 и 2 (фиг. 1) включает (фиг. 3) операционный усилитель 32, который через сопротивления 33 и 34 подключе ; к операционному усилителю 35, параллельно которому подключены сопротивления 36 и 37. Усилитель 32 работает в режиме повторителя д;1я предотвращения искажения сигналов ,а.агчика положения niro- ка гидроподъемника (фиг. 1, поз. 13) из-за малого входного сопротивления усилителей 35. Сопротивления 33 и 34 предназначены для алгебраического суммирования напряжений, снимае.мых с датчика положения нггока гидроподъемника и программного устройства. Сопротивления 36 и 37 служат для реглмирования обратной связи (величины сигнала напряжения, поступающего с датчика положения щтока гидроподъемника), и настройки коэффициента усиления операционного усилителя 35. л1ля осуществления синхро 1нзации движения штоков гидроподъ- емпиков сигна: напряжения, поступающий с датчика гюложения штока на усилитель 32 одного гидроподъемника, подается также на пеинвертированный вход операционного усилителя 35 другого гидроподъемника с целью нахождения сигнала перекоса затвора (разницы сигналов датчиков положения штоков). Для того, чтобы нредотвратить полное вычитание сигналов, )1апряжение, поступающее от датчика другого гидроподъемника, уменьп1ается посредством переменного сопротивления 38.
Привод работает следующим образом.
При нкмюзовании судов привод подъемно- опускного затвора выполняет следующие тех- но.:огические операции: подъем затвора в Г1оложе1и-1е «Закрыть ; подъем затвора в положение «Наполпение ; опускание затвора в положение «Открыть ; подъем затвора в положепие «Закрыть.
Па пульте 17 управлепия (фиг. 2) включается ключ 19, в результате чего подается сигнал на ко1ггроллер 39, в когором записана прО1 рамма этой технологической операции. Затем включается ключ 18 запуска контроллера 39. В контроллере формируются цифровые сигналы в соответствии с включенной програм.мой, которые с выхода 40 подаются на цифроаналоговый преобразователь 41, где преобразовываются в непрерывный сигнал напряжения, пропорциональный заданному закону перемещения затвора. Одновременно с выхода 42 контроллера 39 сигналы поступают на оптронные тиристоры 43, 44 и 45 согласующего устройства 46, которые открываются и выдают сигналы напряжения на пускатели электродвигателей насосов маслонасосных станций 6 (фиг. 1). С выхода цифроаналогового преобразователя 41 непрерывный сигнал напряжения поступает на входы электронных суммирующих усилителей 11 (фиг. 1), этот сигнал суммируется с сигналами напряжения, поступающими от многооборотных потенциометров 13 (датчиков положения штоков гидроподъемников 1 и 2), и поступает на вход электромеханических преобразователей электрогидравлических усилителей 4. Как только насосы 6 начнут подавать рабочую жидкость в напорную гидролинию, золотники усилителей 4 переместятся на величину, пропорциональную токовому сигналу, поступающему от суммирующих усилителей 11, и часть расхода рабочей жидкости из напорной гидролинии через золотник усилителей 4 будет поступать в порщневые полости гидроподъемников 1 и 2, а из них по вторым гидролиниям сливаться в баки 10. Другая часть рабочей жидкости из напорной гидролинии будет поступать через обратные управляюпше клапаны 3 в щтоковые полости гидроподъемников 1 и 2, приводя в движение затвор 16 с начальной заданной скоростью. По мере движения затвора программное устройство 12 выдает непрерывные сигналы напряжения, пропорциональные заданному скоростному графику в функции времени, которые поступают на входы усилителей 11, где суммируются с непрерывными сигналами напряжений, поступающими от потенциометров 13 в функции пути затвора. Результирующие токовые сигналы с усилителей 11 поступают на электромеханические преобразователи (ЭМП) усилителей 4, вызывая смещение их золотников. В результате электрогидравлические усилители 4 не только регулируют расход жидкости для обеспечения заданного скоростного графика движении затвора, но и отслеживают заданную скорость движения затвора.
При достижении затвором 16 конечного положения «Закрыть снимается питание концевым выключателем, установленным на затворе 16, с программного устройства 12, потенциометров 13 и электродвигателей насосных станций 6. Клапаны 4 под действием пружин и давления рабочей жидкости в щтоковых полостях гидроподъемников 1 и 2 закрываются, золотники гидроусилителей 4 под действием давления в управляющих полостях устанавливаются в среднее положение. Схема приходит в исходное положение. Затвор 16 удерживается в конечном положении на масляных подущках в щтоковых полостях гидроподъемников 1 и 2.
Подъем затвора в положение «Наполнение.
На пульГе 17 управления (фиг. 2) включается один из ключей 22-23 в зависимости от выбранного скоростного графика движения затвора, оптимального для данного судна или грунпы судов. Количество графиков и законы перемещения затвора для разных шлюзов выбираются исходя из конкретных условий. Затем включается ключ 18 запуска
контроллера 39. В остальном принцип работы привода такой же, как и при технологической операции «Закрыть, за исключением того, что в работу включаются соответствующие насосы насосной станции 6 (фиг. 1), обеспечивающие максимальную скорость зат5 вора в данной технологической операции. Опускание затвора в положение «Открыть.
Эта операция осуществляется по одному оптимальному скоростному графику (программе) .
0 На пультье 17 управления (фиг. 2) включается ключ 24, затем ключ 18 запуска контроллера 39. В контроллере формируются цифровые сигналы в соответствии с включенной программой, которые с выхода 40
. подаются на цифроаналоговый преобразо ватель 41, где преобразуется в непрерыв ный сигнал напряжения, пропорциональный заданному закону перемещения затвора. Одновременно с выхода 42 контроллера 39 сигнал поступают на оптронный тиристор 47 сог0 ласующего устройства 46, который открывается и выдает сигнал напряжения на электромагниты распределителей 9 (фиг. 1). Непрерывный сигнал напряжения с выхода цифроаналогового преобразователя 41 (фиг. 2) поступает на входы усилителей 11
обоих гидроподъемников (фиг. 1), где суммируется с сигналами напряжения, поступающими от многооборотных потенциометров 1-3. Результирующие сигналы с выходов электронных усилителей 11 поступают на входы электромеханических преобразователей уси0 лителей 4.
При включении электромагнитов распределителей 9 рабочая жидкость из иггоковы.х полостей гидроподъемников 1 и 2 поступает в полости управления клапанов 3, которые принудительно открываются, и жидкость, вытесняемая под действием веса затвора 16, из щтоковых полостей гидроподъемников поступает в напорные гидролинии и управляющие полости гидроусилителей 4, золотQ НИКИ которых открываются на величину, пропорциональную сигналам, поступивпщм от усилителей 11. Рабочая жидкость из иггоковых полостей гидропод1,емников 1 и 2 перетекает в порщневые. проходя через клапаны 3 и гидроусилители 4. Затвор 16
5 под действием собственного веса начинает опускаться. Так как при опускании затвора увеличивающийся объем в порщневых полостях гидроподъемников больше, чем объем
рабочей жидкости, вытесняемый из штоко- вы.х полостей (за счет объема, занимаемого штоками), для полного заполнения поршне- иых полостей к ним подключена вторая гид- ролиния, по которой производится подсос рабочей жидкости из бака 10. По мере опускания затвора программное устройство 12 и потенциометры 13 выдают непрерывные электрические сигналы на входы усилителей 11,0 выхода которых подаются электрические сигналы на входы ЭМП усилителей 4, пропорциональные заданному скоростному графику движения затвора 16 с учетом обратной связи по перемещению затвора.
При достижении затвором 16 конечного положения «Открыть снимается питание путевым выключателем, установленным на одном из редукторов 14 с программного устройства 12 и потенциометров 13. При этом электромагниты распределителей и ЭМП усилителей 4 обесточиваются, клапаны 3 под действием пружин и давления рабочей жидкости в цггоковых полостях гидроподъемников 1 и 2 закрываются, усилители 4 под действием давления в управляющих полостях устанавливаются в среднее положение. Затвор 16 удерживается в конечном положении на масляных подушках в штоковых полостях гидроподъемников 1 и 2.
Синхронизирующее устройство работает следующим образом.
Для удержания затвора 16 в горизонтальном положении во всех технологических операциях с допускаемым перекосом 50 мм в предлагаемом приводе применено синхронизирующее устройство, которое состоит из двух многооборотных потенциометров 13, движки которых механически связаны со щтоками гидроподъемников 1 и 2, а сами потенциометры подключены к входам суммирующих усилителей 11 таким образом, что сигнал напряжения, снимаемый с потенциометра 13 гидроподъемника 1, суммируется с входным сигналом, поступающим от программного устройства 12 в усилителе 11 гидроподъемника 1, и вычитается из входного сигнала в усилителе 11 гидроподъемника 2. Потенциометр 13 гидроподъемника
0 5
0
5
0
2 подключен аналогично к усилителю 11 гидронодъе.мника 2 и усилителю 11 гидроподъемника 1. если при подъеме затвора 16 вверх, щток гидроподъемника 1 будет перемещаться с большей скоростью по сравнению со штоком гидроподъемника 2, то сигнал, поступающий с потенциометра 13 гидроподъемника 1, также увеличится по сравнению с сигналом поте1щиометра 13 гидроподъемника 2. В этом случае вь ьходной сигнал с усилителя 11 гидроподъемника 1 увеличивается, а выходной сигнал с усилителя 11 гидроподъемника 2 уменьшается. Золотник электрогидравлического усилителя 4 гидроподъемника 1 переместится в сторону увеличения слива рабочей жидкости из напорной гидролинии, а золотник усилителя 4 гидроподъемника 2 переместится в сторону уменьшения слива рабочей жидкости из напорной гидролинии. Скорость штока гидроподъемника 1 понизится, а скорость штока гидроподъемника 2 увеличится. По мере выравнивания перекоса затвора сигналы напряжения, снимаемые с потенциометров 13, уравняются и выходные сигналы, поступающие с усилителей на ЭМП усилителей 4, будут одинаковы. Золотники усилителей 4 займут положение, соответствуюпгее скорости заданной затвору 16.
Если при опускании затвора под действием собственного веса шток одного из гидроподъемников будет иметь большую скорость по отношению к другому, то электрический сигнал, снимаемый с потенциометра 13 этого гидроподъемника будет меньше по сравнению с другим (так как потенциометры 13 при опуекании затвора 16 вращаются в обратном направлении). В этом случае выходной сигнал с усилителя 11 опережающего гидроподъемника уменьшится, а выходной сигнал с усилителя 11 отетающего гидроподъемника увеличится. Золотник усилителя 4 опережающего гидроподъемника переместится на уменьшение слива, а золотник усилителя 4 отстающего гидроподъемника переместится на увеличение слива. Таким образом производится выравнивание перекоса затвора 16.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод гидротехнического затвора | 1989 |
|
SU1749361A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |

| Механическое оборудование шлюзов и судоподъемников П | |||
| П | |||
| Онохова, | |||
| М.: Транспорт, 1973, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Передовой опыт и новая техника | |||
| Р | |||
| Б | |||
| Ло банов | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
