Изобретение относится к электротехнике и дажeт быть использовано в частотно-регулируемых электроприводах.
Известен асинхронный электропривод, содер жащий асинхронный двигатель, подсоединенны к преобразователю частоты, выполненному на основе управляемого выпрямителя и автономного инвертора, подключенный к входу управляемого выпрямителя пропорциональноинтегральный регулятор, соединенный своим входом с выходом блока сравнения, датчик тока преобразователя, задатчнк интенсивнос™ п).
Однако данный электропривод не обеспечивает работу двигателя с повышенной перегрузочной способностью на низких частотах преобразователя, так как не содержит обратной связи по ЭДС двигателя.
Наиболее близким к изобретению является асинхронный частотно-регулируемый электропривод, содержащий асинхронный двигатель, подсоединенный к преобразователю частоты, выполненному на основе управляемого выпрямителя и автономного инвертора, пропорционально-интегральньш регулятор, соединенный своим выходом с управляемым выпрямителем, а входом - с выходом первого блока сравнения, второй блок сравнения с тремя входами, один вход которого соединен с выходом первого блока сравнения, а его выход подключен к входу изменения темпа задатчика ингенсивносги, вторЫ вход которого подключен к выходу блока задания угловой скорости, датчик тока, включенный на входе преобразователя частоты, датчик ЭДС двигателя, включенный своим выходом на первый вход первого блока сравнения, блок управления частотой преобразователя, подключенный к эадатчику интенсивности, при этом второй вход второго входа сравнения подключен к датчику тока, а третий к блоку задания угловой скорости 2J.
Однако данная система не обеспечивает устойчивости привода в переходных режимах, так. как имеет различные постоянные времени каналов управления частотой и напряжением преобразователя, а также не обеспечивает разгон привода с заданным значением пускового тока.
Цель изобретения - повышение устойчивости в динамических режимах работы.
Указанная цель достигается тем, что в асинхронный частотно-регулируемый электроГЧ ИБОД, содержащий асинхронный двигатель, подсоединенный к преобразователю частоты, выполненному на основе управляемого выпрямителя и автономного инвертора, пропорционально-интегралы«ый регулятор, соединенный своим выходом с управляемым выпрямителем, а входом - с выходом первого блока сравнения, второй блок сравнения с тремя входами, первый вход которого соединен с выходом первого блока сравнения, а его выход подключен к первому входу изменения темпа задатчика интенсивности, второй вход которого подключен к выходу блока задания угловой скорости, датчик тока, включениый на входе преобразователя частоты, датчик ЭДС двигателя, включенный своим выходом на первый вход первого блока сравнения, блок управления частотой преобразователя, введены блок ограничения,
5 усилитель с ограничением инерционное звено и блок задания темпа разгона, при этом второй вход первого блока сравнения подклю чен к выходу усилителя с ограничением, вход которюго соединен с выходом задатчика
0 интенсивности, подключенным также через инерционное звено к блоку управления часш той преобразователя, а второй и третий входы второго блока сравнения соединены соответственно с блоком задания темпа разгона
5 и через блок ограничения с датчиком тока.
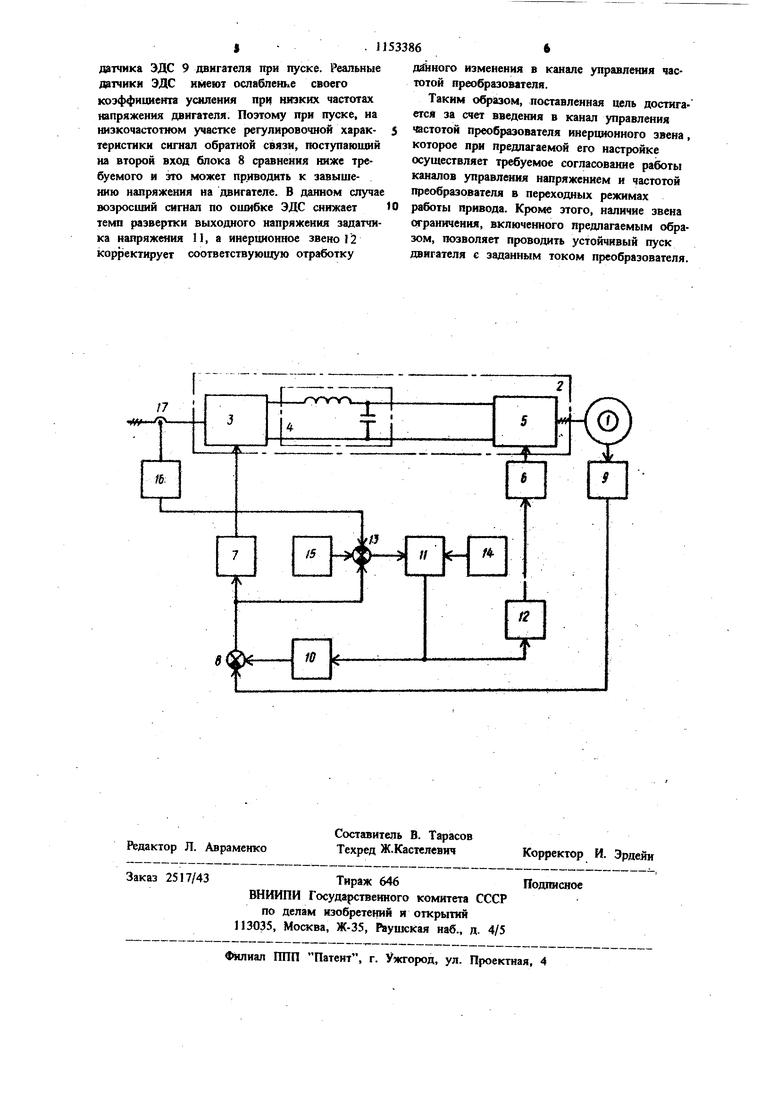
На чертеже представлена блок-схема электропривода.
Электропривод содержит асинхронный двигатель 1, подключенный к выходу преобразователя 2 частоты, содержащему управляемый выпрямитель 3, RC-фильтр 4 и автономный инвертор 5 напряжения. Частота преобразователя 2 формируется блоком 6 управления частотой преобразователя, имеющим линейную
характеристику управления. Управляющий вход выпрямителя 3 подключен к выходу пропорционально-интегрального регулятора 7, вход которого соедаиеи с выходом первого блока сравнения 8, первый вход которого
подключен к выходу датчика 9 ЭДС двигателя. }, а второй - с выходом усилителя 0 с ограничением. Выход задатчика интенсивности 11 соединен с входом усилителя 10 с ограничением и с входом инерщюнного звена 12,,
J выход которого подключен к входу блока 6 управления частотой преобразователя 2. Второй блок сравнения 13 одним в ходом соединен с выходом первого блока сравнения 8, а выходом подключен к первому входу изJ меиения., темпа эадатчика интеисивности 11, второй вход которого подключен к выходу блока, задания угловой скорости И. Второй и третий входы второго блока сравнения 13 соединены соггветственно с блоком задания темпа роста разгона 15 и через блок ограничения 16 с датчиком тока 17.
Устройство работает следуюцдим образом. Задатчик интенсивности f 1 имеет входа. На первый вход поступает управляющее напряжение с выхода блока 14 задания угловой скорости. Величина этого напряжения определяет значение устанокившегося iranряжения на выходе задатчика интенсивности 11. На второй вход (вход, изменения темпа разгона) задатчика интенсивности 11 поступает сигнал с выхода второго блока 13 сравнения. Величина этого сигнала определяет скорость достижения выходным напряжением задатчика интенсивности 11 своего установившегося значения, определяемого и регулируемого с помощью блока 14 задания угловой скорости. При пуске с блока 14 задания угловойскорости подается ступенчатый сигнал на пер-, вый вход задатчика интенсивности 11, при этом на его второй вход (вход изменения темпа задатчика интенсивности 11) через блок 13 сравнения поступает постоянный задающий сигнал с выхода блока 15 задания темпа разгона. Величина задающего напряжения, поступающего на второй вход задатчика интенсивности 11 в это время имеет максимальное значение, так как сигналы с выходов блока 16 ограничения и блока 8. фавнения по цепи обратной отрицательной . связи, подаваемые на второй и третий входы блока 13 сравнения, в начальный момент времени пуска равны нулю. Поэтому с выхода задатчика интенсивности 11 снимается напряжение, возрастающее с максимально возможным (а именно: заданным посредством блока задания темпа разгона) темпом. При зтом выходное напряжение задатчика интенсивности 11 поступает одновременно в каналы управления напряжением и частотой преобразователя, соответственно на входы усилителя 10 с ограничением и инерционного звена 12. С помощью усилителя 10 с ограничением устанавливается требуемый коэффициент передачи для реализации того или иного закона управления, например, U/f const. С выхода усилителя 10 с ограничением управляющее напряжение подается на первый вход блока 8 сравнения. На второй вход того же блока по цепи обратной отрицательной связи поступает сигнал с выхода датчика 9 ЭДС двигателя. Сигнал ощибки по ЭДС является входным для пропорциональноинтегрального регулятора (ПИ-регулятора), с выхода которого снимается задающее напряжение для управляемого выпрямителя 3. Кроме этою, сигнал по ошибке ЭДС с выхода блока 8 сравнения по цепи обратной отрицательной связи подается на второй вход блока 13 сравнения, в результате чего выходное напряжение блока 13 сравнения уменьщается и темп развертки выходного нап ряжения задатчика интенсивности 11 уменьша
ется. FicjiH в процессе пуска входной тек преобразователя 2 превысит пепсред илляшшс (посредством блока ограничения) зн.ччсппо, то сработает блок 16 ограничения, сигнал с выхода которого по цепи обратной отрица тельной связи начинает подаваться тта тротий вход блока 13 сравнения, в pe3yjn,TaTc чего темп разгона снижается до таксчТ степени, что ток на входе преобразователя 2 поддерживается постоянным на уровне максимально зада1П1ого в течение требуемого по усилиям пуска периода. При зтом си1нал с выхода блока 16 ограничения корректирует (посредством задатчика интенсивности II) также и работу канала управления частотой преобразователя, который содержит на входе инерционное звеГю 12. Это звено служит для согласования работы каналов управления частотой и напряжением преобразователя при пуске. Необходимость в этом появляется ввиду того, что канал управления частотой преобразователя в общем случае безинерпион ный, а. в канале управления напряжением содержится значительная инерционность (ПИ-регулятора). Поэтому при пуске частота напряже-, ния на двигателе растет быстрее, чем соответствующее ей по закону управления напряжение двигателя, что приводит к выпадению двигателя из частотного пуска и его опрокидыванию. Инерционное звено 12, включенное последовательно в канал управления частотой преобразователя, осуществляет необходимую ,. задержку в развертке частоты инвертоТребуемую постоянную времени инерционного звена 12 можно определить исходя из достижения равного управляющего напряжения обоих каналов управления за одно и то же время. Известно, что выходной сигнал инерционного звена Практически достигает установивщегося значения при единичном скачкообразном входном на 3-4 постоянные времени инерционного звена. В то же время, выходное напряжение ПИ-регулятора достигает то же значение за время (3-4)7 „ , где Т„„постоянная времени ПИ-регулятора, а Т, постоянная времени инерционного звена. Тогда постоянную времени инерционного эвена 12 .можно определить как Т„ - Тп,,/(3-4) , а его коэффициент усиления будет раьен: К„ 1+К , где К„- коэффициент усиления пропорциональной части ПИ-регулятора. Помимо вышеизложенного, инер1шонное звено 12 выполняет еще одну функцию, а именно: осуществляет определенную коррекцию сигнала управления частотой преобразователя в области завала вь«одной характеристики I. 1153 датчика ЭДС 9 двигателя при пуске. Реальиые датчики ЭДС имеют ослабпе1&.е своего коэффициента усиления при низких частотах напряжения двигателя. Поэтому при пуске, на ннэкочастотном участке регулировочной харак- 5 теристики сигнал обратной связи, поступающий на второй вход блока 8 сравнения ниже требуемого и это может приводить к завышению напряження на двигателе. В данном случае возросший сигнал по ошибке ЭДС снижает 0 темп раэверткн выходного напряження задатчика напряжения 1, а инер1шонное звено 12 корректирует соответствующую отработку 86 д {ного изменения в канале управления частотой преобразователя. Таким образом, поставленная цель достигается за счет введения в канал управлення частотой преобразователя инерционного звена, которое при предлагаемой его настройке осуществляет требуемое согласование работы каналов управления напряжением и частотой преобразователя в переходных режимах работы привода. Кроме этого, наличие звена ограничения, включенного предлагаемым образом, позволяет проводить устойчивый пуск двигателя с заданным током преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| Асинхронный электропривод с экстремальным управлением | 1983 |
|
SU1117812A2 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| Устройство для управления частотнорегулируемым асинхронным электроприводом | 1979 |
|
SU862344A1 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Устройство для двухзонного регулирования асинхронного электродвигателя | 1976 |
|
SU752721A1 |
| Способ устранения автоколебаний асинхронного двигателя | 1974 |
|
SU532167A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЦИФРОВЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2013 |
|
RU2543970C1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
АСИНХРСИНЫЙ ЧАСТОТНО-геГУЛИРУЕМЫЙ ЭЛЕКТЮПРИВОД, содержащий асинхронный двигатель, подсоединенный к преобразователю частоты, выполненному на основе управляемого выпрямителя и автономного инвертора, пропорционально интегральный регулятор, соединенный своим выходом с управ лаемым выпрямителем, а входом - с выходом первого блока сравнения, второй блок сравнения с тремя входами, первый вход которого соединен с выходом первого блока сравнения, а его выход подключен к первому входу изменения темпа задатчика иитенсивности, второй вход которого подключен к выходу блока задания угловой скорости, датчик тока, включенный на входе преобразователя частоты, датчик ЭДС двигателя, включенный своим выходом на первый вход первого блока сравнеиня, блок управления частотой преобразователя, отличающийся тем, что, с целью повышения устойчивости в динамических режимах работы, в него введены блок ограничения, усилитель с ограничением, ииершюнное звено и блок задания темпа разгона, при этом второй вход первого блока сравнения подключен к выходу усилителя с ограничением, вход которого соединен с выходом задатчика интенсивности, подключвошм через кне{Я1Яонное, звено к блоку управления частотой прео)азователя, а второ и третий входы второго блока сравнения соеданены соответственно с блоком задания ,темпа разгона я чер«з бпок си-раничения датчиком TOKt. СЛ1 со со 00 Од
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ САПРОПЕЛЯ | 2003 |
|
RU2246592C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для частотного управления асинхронным электродвигателем | 1975 |
|
SU640412A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
