из
/J
11
00
ч
со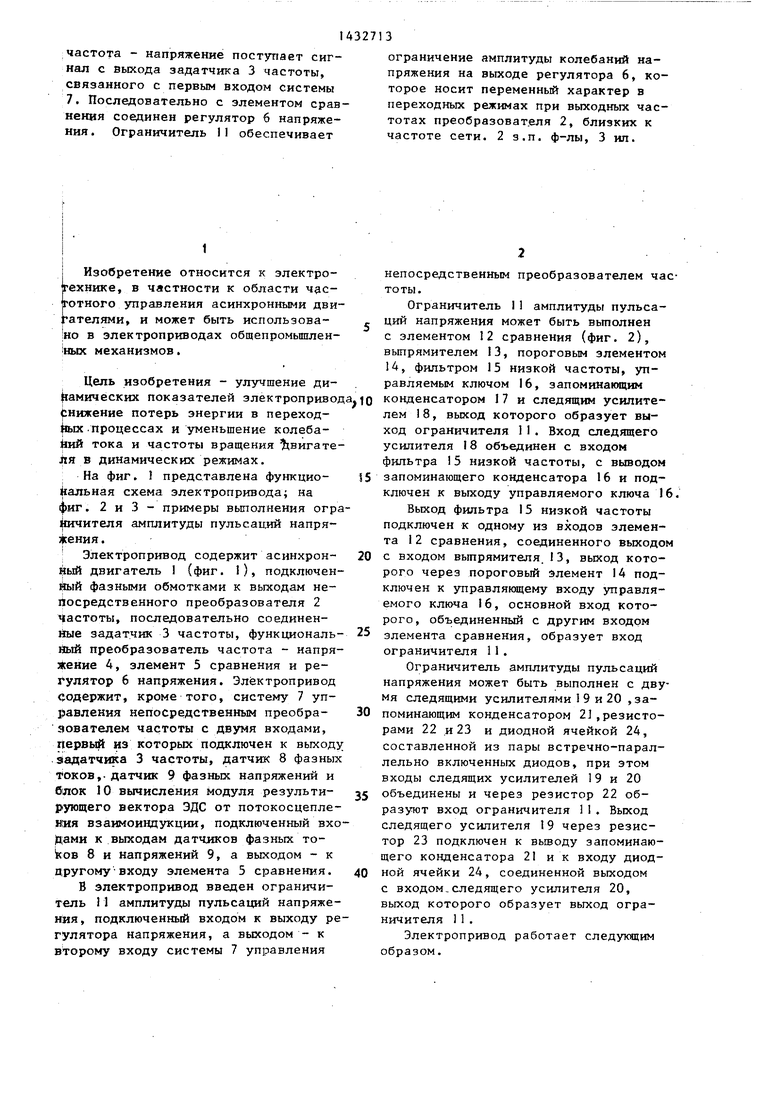
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Электропривод переменного тока | 1985 |
|
SU1314428A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Электропривод | 1991 |
|
SU1837379A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2231208C2 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов. Целью изобретения является улучшение динамических показателей, уменьшение потерь энергии в переходных процессах путем уменьшения колебаний тока и частоть1. вращения в динамических режимах. С этой целью в электропривод введен ограничитель 11 амплитуды пульсаций напряжения. Вход ограничителя 11 подключен к выходу регулятора 6 напряжений, а выход - к второму входу системы 7 управления непосредственным преобразователем 2 частоты асинхронного двигателя 1. В цепь статор- ной обмотки двигателя 1 включены датчик 8 тока и датчик 9 напряжения. Выходы датчиков 8, 9 подключены к входам блока 10 вычисления модуля результирующего вектора ЭДС от потоко- сцепления взаимоиндукции. Выход блока 10 соединен с вторым входом элемента 5 сравнения. На второй вход элемента 5 через преобразователь 4 (Л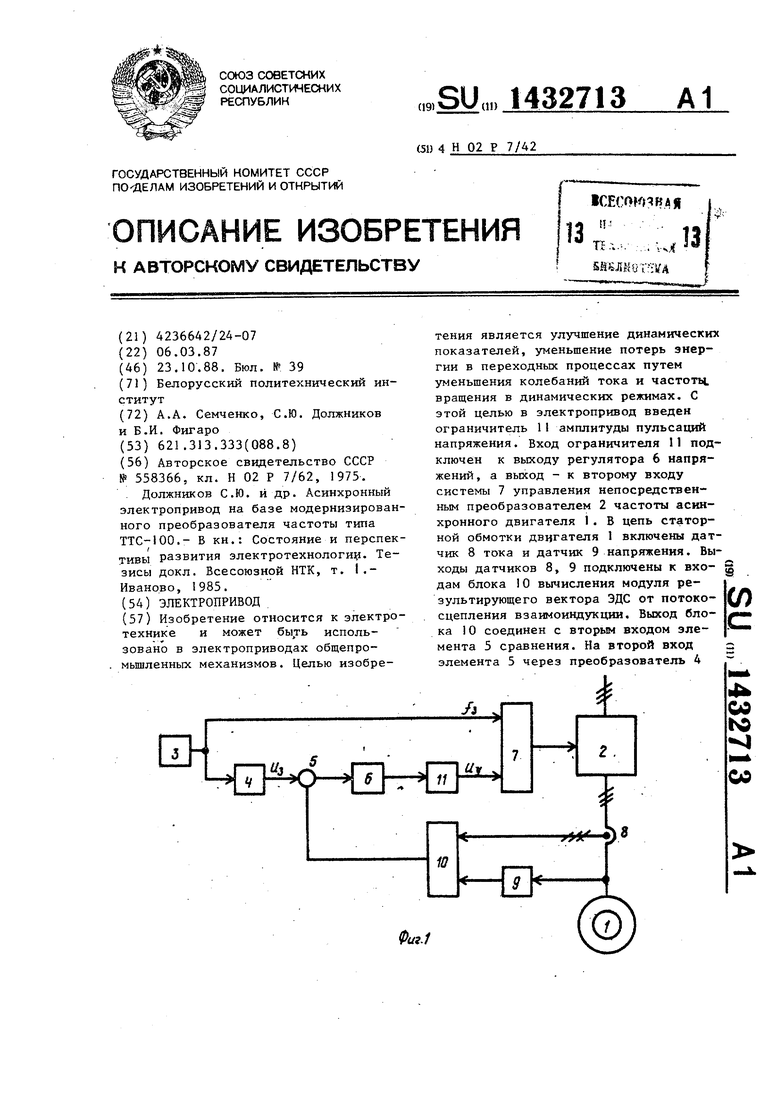
0ui.f
частота - напряжение поступает сигнал с выхода задатчика 3 частоты, связанного с первым входом системы 7. Последовательно с элементом сравнения соединен регулятор 6 напряжения. Ограничитель 11 обеспечивает
1432713
ограничение амплитуды колебаний напряжения на выходе регулятора 6, которое носит переменный характер в переходных режимах при выходных частотах преобразователя 2, близких к частоте сети. 2 з.п. ф-лы, 3 ип.
1
Изобретение относится к электро- гехнике, в частности к области час- готного управления асинхронными дви- ателями, и может быть испольэова- ;но в электроприводах общепромыпшен- ных механизмов.
Цель изобретения - улучшение ди- |1амических показателей электропривод |:нижение потерь энергии в переход- Цк .процессах и уменьшение колеба- Йий тока и частоты вращения Двигателя в динамических режимах.
На фиг. I представлена функцио- Йальная схема электропривода; на фиг. 2 и 3 - примеры выполнения огра Йичителя амплитуды пульсаилй напря- т сения.
Электропривод содержит асинхрон- Йый двигатель (фиг. 1), подключен- Йый фазными обмотками к выходам непосредственного преобразователя 2 Частоты, последовательно соединен- йые задат.чик 3 частоты, функциональ- Йый преобразователь частота - напряжение А, элемент 5 сравнения и регулятор 6 напряжения. Электропривод содержит, кроме того, систему 7 управления непосредственным преобра- зователем частоты с двумя входами, первый из которых подключен к выходу задатчика 3 частоты, датчик 8 фазных токов,-датчик 9 фазных напряжений и блок 10 вычисления модуля результи- рующего вектора ЭДС от потокосцепле- н(ия взаимоиндукции, подключенный вхо )а,ами к выходам датчиков фазных то- koB 8 и напряжений 9, а выходом - к другому входу элемента 5 сравнения.
В электропривод введен ограничитель 11 амплитуды пульсаций напряжения, подключенный входом к выходу регулятора напряжения, а выходом - к второму входу системы 7 управления
непосредственным преобразователем чатоты.
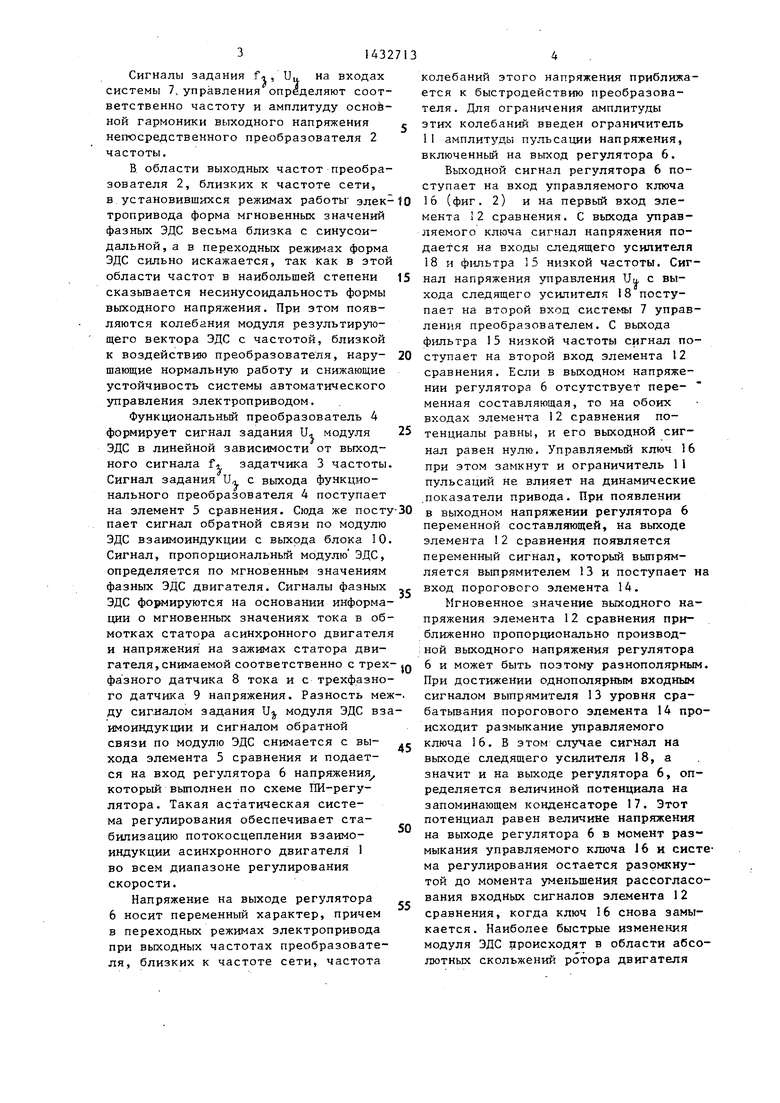
Ограничитель 11 амплитуды пульсаций напряжения может быть вьтолнен с элементом 12 сравнения (фиг. 2), выпрямителем 13, пороговым элементом 14, фильтром 15 низкой частоты, управляемым ключом 16, запоминающим конденсатором I7 и следящим усилителем 18, выход которого образует выход ограничителя 11. Вход следящего усилителя I8 объединен с входом фильтра 15 низкой частоты, с выводом запоминающего конденсатора 16 и подключен к выходу управляемого ключа 1
Выход фильтра 15 низкой частоты подключен к одному из входов элемента 12 сравнения, соединенного выходо с входом выпрямителя. 13, выход которого через пороговый элемент 14 подключен к управляющему входу управляемого ключа 16, основной вход которого , объединенный с другим входом элемента сравнения, образует вход ограничителя 11.
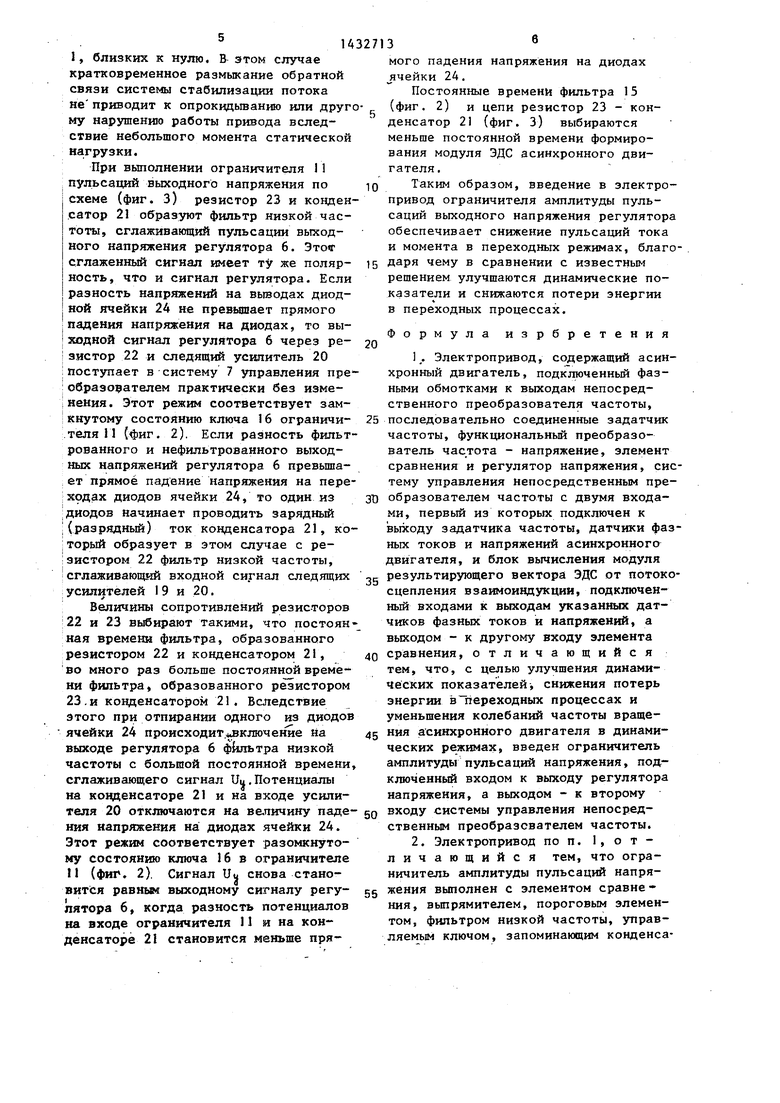
Ограничитель амплитуды пульсаций напряжения может быть выполнен с двумя следящими усилителями 1 9 и 20 ,запоминающим конденсатором 2J,резисторами 22 и 23 и диодной ячейкой 24, составленной из пары встречно-параллельно включенных диодов, при этом входы следящих усилителей 19 и 20 объединены и через резистор 22 образуют вход ограничителя 11. Выход следящего усилителя 19 через резистор 23 подключен к вьшоду запоминающего конденсатора 21 и к входу диодной ячейки 24, соединенной выходом с входом,следящего усилителя 20, выход которого образует выход ограничителя 1 1 .
Электропривод работает следующим образом.
31432
Сигналы задания fi, Uu на входах системы 7. управления определяют соответственно частоту и амплитуду осной- ной гармоники выходного напряжения непосредственного преобразователя 2 частоты.
В области выходных частот преобразователя 2, близких к частоте сети, в установившихся режимах работы электропривода форма мгновенных значений фазных ЭДС весьма близка с синусоидальной, а в переходных режимах форма ЭДС сильно искажается, так как в этой области частот в наибольшей степени сказьгаается несинусоидальность формы выходного напряжения. При этом появляются колебания модуля результирующего вектора ЭДС с частотой, близкой к воздействию преобразователя, нару- шающие нормальную работу и снижающие устойчивость системы автоматического управления электроприводом.
Функциональный преобразователь 4 формирует сигнал задания U, модуля ЭДС в линейной зависимости от выходного сигнала f задатчика 3 частоты. Сигнал задания U с выхода функционального преобразователя 4 поступает на элемент 5 сравнения. Сюда же посту пает сигнал обратной связи по модулю ЭДС взаимоиндукции с выхода блока 10. Сигнал, пропорциональный модулю ЭДС, определяется по мгновенным значениям фазных ЭДС двигателя. Сигналы фазных ЭДС формируются на основании информации о мгновенных значениях тока в обмотках статора асинхронного двигателя и напряжения на зажимах статора двигателя, снимаемой соответственно с трех фазного датчика 8 тока и с трехфазного датчика 9 напряжения. Разность меж ду сигналом задания Uj модуля ЭДС взаимоиндукции и сигналом обратной связи по модулю ЭДС снимается с вы- хода элемента 5 сравнения и подается на вход регулятора 6 напряжения который выполнен по схеме ПИ-регу- лятора. Такая астатическая система регулирования обеспечивает стабилизацию потокосцепления взаимоиндукции асинхронного двигателя 1 во всем диапазоне регулирования скорости.
Напряжение на выходе регулятора 6 носит переменный характер, причем в переходных режимах электропривода при выходных частотах преобразователя, близких к частоте сети, частота
5 0
5 0 Q , -
5
0
колебаний этого напряжения приближается к быстродействию преобразователя. Для ограничения амплитуды этих колебаний введен ограничитель 11 амплитуды пульсации напряжения, включенный на выход регулятора 6.
Выходной сигнал регулятора 6 поступает на вход управляемого ключа 16 (фиг. 2) и на первый вход элемента 12 сравнения. С выхода управляемого ключа сигнал напряжения подается на входы следящего усилителя 18 и фильтра 15 низкой частоты. Сигнал напряжения управления U;. с выхода следящего усилителя 18 поступает на второй вход систеьм 7 управления преобразователем. С выхода фильтра 15 низкой частоты сигнал поступает на второй вход элемента 12 сравнения. Если в выходном напр5ше- нии регулятора 6 отсутствует переменная составляющая, то на обоих входах элемента 12 сравнения потенциалы равны, и его выходной сигнал равен нулю. Управляемый ключ 16 при этом замкнут и ограничитель 11 пульсаций не влияет на динамические показатели привода. При появлении в выходном напряжении регулятора 6 переменной составляющей, на выходе элемента 12 сравнения появляется переменный сигнал, который выпрямляется выпрямителем 13 и поступает на вход порогового элемента 14.
Мгновенное значение выходного напряжения элемента 12 сравнения приближенно пропорционально производ- :ной выходного напряжения регулятора 6 и может быть поэтому разнополярным. При достижении однополярным входным сигналом выпрямителя 13 уровня срабатывания порогового элемента 14 происходит размыкание управляемого ключа 16. В этом случае сигнал на выходе следящего усилителя 18, а значит и на выходе регулятора 6, определяется величиной потенциала на запоминающем конденсаторе 7. Этот потенциал равен величине напряжения на выходе регулятора 6 в момент размыкания управляемого ключа 16 и система регулирования остается разомкнутой до момента уменьшения рассогласования входных сигналов элемента 12 сравнения, когда ключ 16 снова замыкается. Наиболее быстрые изменения модуля ЭДС цроисходят в области абсолютных скольжений ротора двигателя
U
1, близких к нулю. В этом случае кратковременное размыкание обратной связи системы стабилизации потока не приводит к опрокидьшанию или друго му нарушенизо работы привода вследствие небольшого момента статической нагрузки.
При выполнении ограничителя 11 пульсаций выходного напряжения по схеме (фиг. З) резистор 23 и конденсатор 21 образуют фильтр низкой частоты, сглаживающий пульсации выходного напряжения регулятора 6. Этот сглаженный сигнал имеет ту же поляр- кость, что и сигнал регулятора. Если разность напряжений на вьгоодах диодной ячейки 24 не превышает прямого I падения напряжения на диодах, то вы- I ходкой сигнал регулятора 6 через ре- зистор 22 и следящий усиотитель 20 :поступает в систему 7 управления пре- ;образо ателем практически без изме- I нения. Этот режим соответствует зам- :ккутому состоянию ключа 16 ограничи- .теЛяМ {фиг. 2). Если разность фильтрованного и нефильтрованного выходных напряжений регулятора 6 превышает прямое падение напряжения на пере- хрдах диодов ячейки 24, то один из ;диодов начинает проводить зарядный ;(разрядный) ток конденсатора 21, ко- ;торый образует в этом случае с ре- iзистором 22 фильтр низкой частоты, сглаживающий входной сигнал следящих усилителей I9 и 20.
Величины сопротивлений резисторов 22 и 23 выбирают такими, что постоянная времени фильтра, образованного резистором 22 и конденсатором 21, во много раз больше постоянной време- ии фильтра, образованного резистором 23.и коцденсатором 21. Вследствие этого при отпирании одного из диодов ячейки 24 происходит.члключение на выходе регулятора 6 фильтра низкой частоты с большой постоянной времени, сглаживающего сигнал Uu.Потенциалы иа конденсаторе 21 и на входе усилителя 20 отключаются на вепичину паде- имя напряжения на диодах ячейки 24. Этот режим соответствует разомкнутому состоянию ключа 16 в ограничителе II (фиг. 2). Сигнал Uu снова становится равньв« выходному сигналу регу- лятора 6, когда разность потенциалов на входе ограничителя 11 и иа конденсаторе 21 становится меньше пря
71
s 0 5 И g
0 5 0 5
3б
мого падения напряжения на диодах чейки 24.
Постоянные времени фильтра 15 (фиг. 2) и цепи резистор 23 - конденсатор 21 (фиг. 3) выбираются меньше постоянной времени формирования модуля ЭДС асинхронного двигателя.
Таким образом, введение в электропривод ограничителя амплитуды пульсаций выходного напряжения регулятора обеспечивает снижение пульсаций тока и момента в переходных режимах, благодаря чему в сравнении с известным решением улучшаются динамические показатели и снижаются потери энергии в переходных процессах.
Формула изрбретения
1,. Электропривод, содержащий асинхронный двигатель, подключенный фазными обмотками к выходам непосредственного преобразователя частоты, последовательно соединенные задатчик частоты, функциональный преобразователь частота - напряжение, элемент сравнения и регулятор напряжения, систему управления непосредственным преобразователем частоты с двумя входами, первый из которых подключен к выходу задатчика частоты, датчики фазных токов и напряжений асинхронного двигателя, и блок вычисления модуля результирующего вектора ЭДС от потоко- сцепления взаимоиндукции, подключенный входами к выходам указанных датчиков фазных токов и напряжений, а выходом - к другому входу элемента сравнения, отличающийся тем, что, с целью улучшения динамических показателей, снижения потерь энергии в переходных процессах и уменьшения колебаний частоты вращения асинхронного двигателя в динамических режимах, введен ограничитель амплитуды пульсаций напряжения, подключенный входом к выходу регулятора напряжения, а выходом - к второму входу системы управления непосредственным преобразователем частоты.
тором и следящим усилителем, выход которого образует выход ограничителя амплитуды пульса1щй напряжения, при этом вход следящего усилителя объединен с входом фильтра низкой частоты, с вьюодом запоминающего конденсатора и подключен к выходу управляемого ключа, выход фильтра низкой частоты подключен к одному из входов элемен- та сравнения, соединенного выходом с входом вьтрямителя, выход которого через пороговый элемент подключен к управляющему входу управляемого ключа, основной вход которого, объ- единенный с другим входом элемента сравнения, образует вход ограничителя амплитуды пульсаций напряжения.
ЧЗ
38
f8
JV
Я
| Способ автоматического управления частотно-регулируемого электропривода и устройство для осуществления этого способа | 1975 |
|
SU558366A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Должников С.Ю | |||
| и др | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Тезисы докл | |||
| Всесоюзной НТК, т | |||
| I.- Ивано.во, 1985. | |||
