быстродействия. Поставленная цель достигается за счет введения первых 8 и вторых 12 сумматоров, последовательно соединенных вычислительного блока 9 и блока 10 сравнения, а в каждом блоке 2 обработки сигналов - компенсатора межсимвольных искажений, первого и второго вычислительных блоков. Увеличение быстродействия приводит (( уменьшению длительности тактового интервала, и следовательно, при неизменности времени рассеяния в канале - к увеличению порядка системы, что практически не сказывается на частотных свойствах вычислительного блока 9. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДЕМОДУЛЯЦИИ ДВОИЧНЫХ СИГНАЛОВ | 1991 |
|
RU2065668C1 |
| УСТРОЙСТВО ДЛЯ ДЕМОДУЛЯЦИИ ДВОИЧНЫХ СИГНАЛОВ | 1994 |
|
RU2085047C1 |
| Линейное устройство коррекции межсимвольной интерференции | 1984 |
|
SU1256213A1 |
| Линейное устройство коррекции межсимвольной интерференции | 1984 |
|
SU1210225A1 |
| Устройство демодуляции двоичных сигналов | 1986 |
|
SU1394457A1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ДЕМОДУЛЯЦИИ ДИСКРЕТНЫХ СИГНАЛОВ В МНОГОЛУЧЕВОМ КАНАЛЕ СВЯЗИ И ДЛЯ ОЦЕНКИ ПАРАМЕТРОВ КАНАЛА | 2004 |
|
RU2271070C2 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ДЕМОДУЛЯЦИИ ДИСКРЕТНЫХ СИГНАЛОВ В МНОГОЛУЧЕВОМ КАНАЛЕ СВЯЗИ | 2004 |
|
RU2267230C1 |
| Устройство для приема бинарных сигналов | 1986 |
|
SU1385320A1 |
| Устройство для регенерации цифрового сигнала с компенсацией межсимвольных искажений | 1986 |
|
SU1327304A1 |
| ПРИЕМНИК ЦИФРОВЫХ СИГНАЛОВ | 2010 |
|
RU2423794C1 |
Изобретение относится к технике радиосвязи и может найти применение в системах передачи дискретных сообщений по каналам связи с рассеянием энергии принимаемых сигналов по времени и частоте, например в декаметровом канале связи. Целью изобретения является повышение быстродействия. Поставленная цель достигается за счет введения первых 8 и вторых 12 сумматоров, последовательно соединенных вычислительного блока 9 и блока сравнения 10, а в каждом блоке 2 обработки сигналов - компенсатора межсимвольных искажений, первого и второго вычислительных блоков. Увеличение быстродействия приводит к уменьшению длительности тактового интервала, и следовательно при неизменности времени рассеяния в канале - к увеличению порядка системы, что практически не сказывается на частотных свойствах вычислительного блока 9. 2 ил.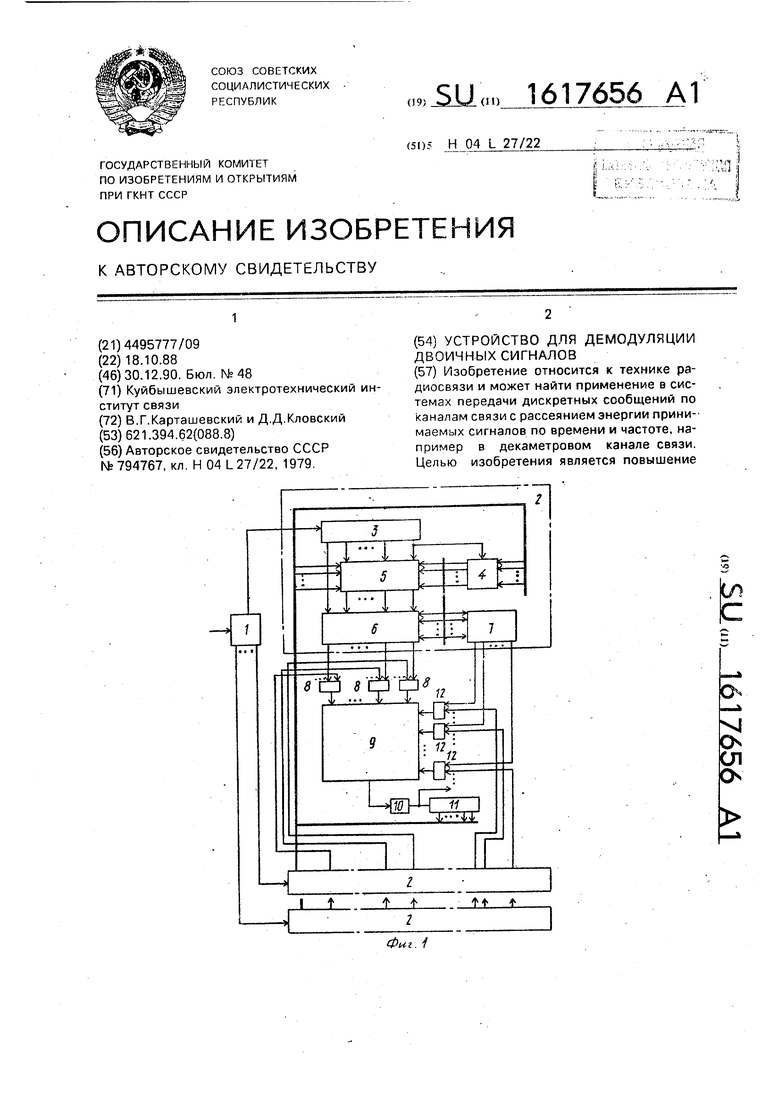
Изобретение относится к технике радиосвязи и может найти применение в системах передачи дискретных сообщений по каналам связи с рассеянием энергии принимаемых сигналов по времени и по частоте, например в декаметроЕюм канале связи.
Целью изобретения является повышение быстродействия.
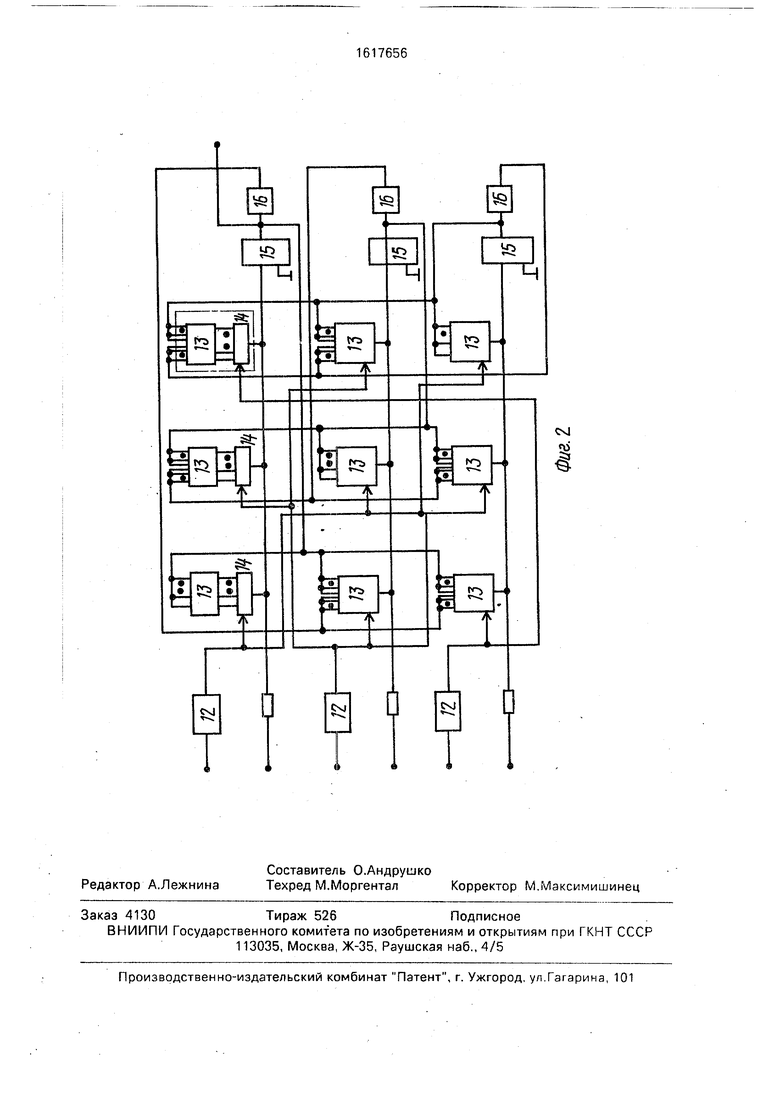
На фиг. 1 изображена структурная элек- трическая схема предлагаемого устройства; на фиг. 2 - структурная электрическая схема вычислительного блока.
Устройство содержит блок 1 преобразо- вания входного сигнала блоки 2 обработки сигналов, каждый из которых содержит линию 3 задержки, блок 4 оценки импул ьсной реакции, компенсатор 5 межсимвольных искажений, первый 6 и второй 7 вычислитель- ные блоки, а также первые сумматоры 8, вычислительный блок 9, блок 10 сравнения, регистр 11 сдвига и вторые сумматоры 12.
Вычислительный блок 9 выполнен на преобразователях 13 напряжение - код, матрице резисторов 14, мультиплексорах 15, усилителях 16 и инверторах 17.
Устройство работает следующим образом.
Обозначим низкочастотный эквивалент импульсной реакции канала связи с памятью через g(t, . Тогда на входе демодулятора при передаче последовательности кодовых символов {Ь|), I 0,К сигнал будет иметь вид
z( t) |; big(t,t-iT)-fw(t),
0) t(C) Та; ,
где йХ t) - мешающий процесс на входе устройства;
Т - длительность тактового интервала;
Та - интервал анализа колебанияХ1).
Предположим, что кодовые символы принимают значения ±1, а длительность импульсной реакции не превосходит МТ.
Задачей устройства является вынесение решения относительно последовательности кодовых символов {bi} по наблюдаемому на интервале анализа Та ко- лебанинэ z(t).
Если взять отсчеты из сигнала z(t) согласно теореме Котельникова, то выражение (1) можно переписать в матричной форме как
В +W
(2)
dG
(3)
9 М.К 9 М -1 .к +1 о 9м.к -М
25
30 35
40
5
W , Wo ,wiw 2 М - 2 :
,bibKf;
( ) - символ транспонирования матрицы.
Элементы матрицы G определяются из условия
(t,t-jT), ,(i +1 )Т.
Таким образом, при данном выборе матрицы в (3) интервал анализа определяется как Та (К + М - 2)Т. Такой выбор интервала анализа в отличие от часто используемого при реализации приема в целом Та МТ упрощает аппаратурную реализацию излагаемого ниже метода вынесения решения относительно элементов вектора В. Например, при М 3 и К 2 выражение (2) имеет вид
Если бы wi (t) О . то уравнение Z: - G -В имело бы решение § при известной в месте приема матрице G (G обратная матрица). Решения Во, .I io
можно было бы получить из системы уравнений
. : .
УОО bo +уо1 bi +.. .уо,к -Ьк fo;
УЮ Ьо +У11 bi +. . .у.к Ьк fi (5) 15
УК.о bo +ук,1 bi +. . .ук.К Ьк fK,
являющейся эквивалентной формой записи выражения (2) при W О, где20
2М -2 .
yKj 2 giK
91 j
(6)
25
30
2М -2
УК 2 9i К Zi ;
j,K 0,1М-1.
В случае ш (t) 5 О система(5) может оказаться несовместной или определитель системы будет близок к нулю, т.е. символ G Z может не иметь смысла Для того, чтобы гарантировать возможность получения решений о, i1зм-1 из (2), можно рассматривать модифицированную сие- 35 тему уравнений, отличающуюся от системы 5) наличием смещения а в коэффициентах ij, ,K, т.е. в диагональных элементах (а О). При этом получающееся решение имеет вид40
B2(),
(7)
где I - единичная матрица.
Когда К и М соизмеримы, можно считать, что параметры канала остаются практически неизменными, что упрощает вид матрицы G и соответственно вычисл ение коэффициентов ук j в выражении (6). Так, для системы (4), решение относительно Ьо из (7) имеет вид
bA (fo Cyo+a)2-yi2
-i1Y(Yo+a}-Y2 + + (yo+or)n)};
: io
.
15
20
25
30
3540
45
50
55
А (уо+а)(уо+а)2-). -2yi2(yo+a)(yo+a) (8)
УО УОО yil У22 91 +92
У2 Уо2 уг2 91 дз; to 9iZo +92Zi +g3Z2 ; fi 9lZi+g2Z2-I-93Z3; f2 9iZ2+g2Z3-J-gaZ,
где предполагается равенство параметров канала:
91 911 912 913;
92 921 922 923;
93 931 932 933.
Отличительная особенность решения (8) заключается в том, чтоЪо может принимать все возможные значения на числовой прямой и для окончательного формирования ре- шения нужно DO сравнить с нулевым порогом, т.е. формировать решение по правилу.
Vл
Ьо sl9n bo(9)
При К - 00 данным методом можно пользоваться, сдвигая интервал анализа Та (2М - 2) Т I к-м по оси времени на тактовый интервал и вынося решение каждый раз о символе, занимающем первую позицию, внутри Та, с предварительным вычитанием последействия от символов, по которым уже принято решение с помои1ью обратной связи по решению. Этот метод реализован в устройстве.
Блок 1, на вход которого поступает канальный- сигнал, выбирает и запоминает отсчеты, причем число выходов блока 1 N 2FT, так что последовательность отсчетов на каждом выходе может рассматриваться как ветвь разнесения (F - полоса частот сигнала).
Блок 3 представляет собой дискретно- аналоговую линию задержки, которая в течение тактового интервала Т сохраняет на своих (2М-1) отводах 2, i 1,{2М-1)входногй сигнала.
Блок 4 оценки импульсной реакции по наиболее задержанному отсчету входного сигнала.с использованием обратной связи по решению создает на своих М выходах оценки отсчетов импульсной реакции, обновляемые на каждом тактовом интервале, Т, т.е. осуществляет слежение за изменяющимися параметрами канала связи.
Компенсатор 5 межсимвольных искажений осуществляет вычитание последействия от символов, по которым ранее приняты решения, хранящиеся в регистре 11 сдвига. Пусть, например, М 3 и на выходе линии 3 задержки в i-й момент времени зафиксировано (2М-1) отсчетов входного сигнала: Zi, Zi-i, Zi-2, Zi-3, Zi-4. При этом в регистре 11 .сдвига хранятся решения bi-i, 01-2, 81-3, ей, Di-5, DI-6. Компенсация межсимвольных искажений заключается в формировании очищенных отсчетов по правилу
- Ь| - 2 92 - Ь| - 3 дз;
7v - A-jt4 3 - -Ь,-зд2-Ь,--,дз, ,oj
Zi-3 Zi -3 --bi -3gi iJ л|Vл
-bi - 4 g2 - bf -- 5 g ;
Zj-4 -bi--4gl -bi -5g2 - bi - бдз .
В выражении (10) gi, дз, дз - оценки отсчетов импульсной реакции, полученные в блоке 4. Отсчет Zi не обрабатывается в компенсаторе 5, так как решение 6i еще только предстоит получить внутри данного тактового интервала на выходе блока 10. Так как все решения принимают значения +1, реализовать (10) можно с использованием ключевых перемножителей и операционных усилителей, включенных по схеме инвертирующего сумматора.
В первом вычислительном блоке 6 осуществляется вычисление значений fk, К 0,1М-1, согласно (6) по очищенным отсчетам входного сигнала и оценкам импульсной характеристики. Для рассматриваемого примера (М 3):
fo, gi Zi + g2 Z| -1 Ч- дз Zi - 2
JCл -ч, Л -,. л -,
Т1 g 1 Zi - 1 -t- g2 Zi - 2 -f дз Zi - 3 ;
f2 gi Zi -2 -bg2 Zi -3 -fgaZi -4. (11)
Реализовать вычисление значений bk, К 0,1, М-1, можно на основе перемножителей и сумматоров, выполненных с использованием операционных усилителей.
Во втором вычислительном блоке 7 формируются коэффициенты из (6). В силу особенностей матрицы G, когда параметры канала связи на интервале анализа предполагаются неизменными, общее число отличающихся друг от друга коэффициен- тов ykj , которые надо вычислить для решения системы (5), равно М. В рассматриваемом примере это уо ,yi, yi . Вычисляются они согласно формулам (8), где вместо отсчетов импульсной реакции берутся их оценки на выходе блока 4. Структура выражений (11) и (8) совпадает (содержатся операции умножения и сложения), поэтому и практическая реализация схемных решений по вы- числению fk, К О, М-1, и ykj J О, М-1, совпадает.
В N-входовых сумматорах 8 осуществляется сложение одноименных значений ко- эффициентов f и у различных ветвей разнесения, что обеспечивает когерентное сложение ветв,ей.
По сформированным значениям коэффициентов f и у по выбранному значению а, которое добавляется к диагональным коэффициентам системы (5) для обеспечения устойчивости получаемых решений, в вы- 0 числительном блоке 9 находятся оценки о, 1DM-I. Резисторы, определяющие коэффициенты системы (5) с учетом смещения диагональных элементов } i , выбираются
0
5
5
из условий:
30
(11)
Rij
5
0
1 1,2,3.
В силу того, что У| i и У| J - непрерывные величины, при 1имающие произвольные значения обоих знаков (за исключением У| I, которые положительны), весь диапазон изменения каждого коэффициента разбит на интервалы и количество резисторов в каждой матрице 14 резисторов определяется числом интервалов, а значение каждого резистора определяется средним значением интервала(для коэффициентов/ i добавляется смещение а ). Нужный резистор подключается к схеме мультиплексором 15, управляемым преобразователем 13 напряжение - код, на вход которого подается соответствующее напряжение из второго вычислительного блока 7. Решение системы осуществляется методом компенсации токов на входе каждого операционного усилителя практически мгновенно, независимо от порядка системы.
5 Увеличение быстродействия приводит к уменьшению длительности тактового интервала Т и при неизменности времени рассеяния в канале это к увеличению порядка системы (5), что практически не сказывается
5
0
на частотных свойствах вычислительного, блока 9.
На выходе вычислительного блока 9 формируется оценка Ьо. которая для правра- щения в решение Ьо подается на блок 10 сравнения, представляющий собой пороговое устройство с нулевым порогом. Полученное на выходе блока 10 сравнение решение подается получателю сообщений и запоминается в регистре 11 сдвига для вы- читания последействия от него на следующем тактовом интервале.
Повышение быстродействия достигается без ухудшения технических характеристик из-за ограниченных частотных свойств ключевых перемножителей при дискретном характере перебора гипотез относительно реализации передаваемой двоичной последовательности за счет отказа от дискретно го характера перебора гипотез и перехода к 2 аналоговому перебору, позволяющему использовать в данном случае схему на опера- ционных усилителях.
Формула изобретения
Устройство для демодуляции двоичных сигналов, содержащее регистр сдвига и блок преобразования входного сигнала, выходы которого подключены к сигнальным входам блоков обработки сигналов, каждый из которых содержит последовательно соединенные линию задержки и блок оценки импульсной реакции, причем вход линии задержки является сигнальным входом блока обработки сигналов, а вход блока преобра,
5 10
15 20
5
0 5
зования входного сигнала и вход регистра сдвига являются соответственно входом и выходом устройства, отличающееся тем, что, с целью повышения быстродействия, введены первые и вторые сумматоры и последовательно соединенные вычислительный блок и блок сравнения, а в каждом блоке обработки сигналов - компенсатор межсимвольных искажений, первый и второй вычислительные блоки, при этом первые и вторые выходы блоков обработки сигналов подключены к входам соответственно первых и вторых сумматоров, выходы которых подключены к вычислительному блоку, выход блока сравнения подключен к входу регистра сдвига,- выходы которого подключены к управляющим входам блоков обработки сигналов, в каждом из которых соответствующие выходы линии задержки подключены к первому входу первого вычислительного блока и первым входам компенсатора межсимвольных искажений, выходы которого Подключены к вторым входам первого вычислительного блока, выходы блока оценки импульсной реакции подключены к входам второго вычислительного блока, вторым входам компенсатора межсимвольных искажений и третьим входам первого вычислительного блока, выходы которого, а также выходы второго вычислительного блока являются соответственно первыми и вторыми выходами блока обработки сигналов, управляющими входами которого являются вторые входы блока оценки импульсной реакции и третьи входы компенсатора межсимвольных искажений.
Ч
fr
ю
&
rrs
ira
ГГ5
D
C4J
Ч
Ж
to
CSJ
i
ш
0
Cxt
| Устройство для демодуляциидВОичНыХ СигНАлОВ | 1979 |
|
SU794767A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
