Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАДАННОЙ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ | 2004 |
|
RU2258341C1 |
| СИГНАЛИЗАТОР ТЕХНОЛОГИЧЕСКОЙ СКОРОСТИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2002 |
|
RU2219499C2 |
| Устройство для контроля и регистрации работы транспортных средств | 1983 |
|
SU1152010A1 |
| Способ контроля поперечного отклонения мобильного сельхозагрегата от базовой линии | 1988 |
|
SU1694070A1 |
| Сигнализатор загрузки двигателя | 1990 |
|
SU1795316A1 |
| Осциллографический способ измерения временных параметров сигналов | 1985 |
|
SU1372234A1 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1990 |
|
SU1789898A1 |
| Устройство для автоматического счета подвижных объектов | 1975 |
|
SU658023A1 |
| Цифровые вторичные часы-хронометр | 1979 |
|
SU845141A1 |
| Многоканальное устройство для регистрации и индикации аварийных ситуаций | 1990 |
|
SU1796907A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для автовождения сельскохозяйственных агрегатов. Цель изобретения - повышение точности контроля и эксплуатационной надежности устройства. Изменением цифрового значения вывода счетчиков 9,10 выбирают допустимые отклонения при определенных скоростях прямолинейного движения схемы 11,12,13,14 совпадения, связанные с соответствующими выходами счетчиков 7,8 определяют цифровые значения поперечных отклонений по разности частот fin f2 датчика 1. Индикатор 3 показывает либо нормальное положение агрегата, либо отклонение его влево или вправо за пределы допуска.4 ил.
О
09
GJ О СО
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для автовождения сельскохозяйственных агрегатов.
Цель изобретения - повышение точности контроля и эксплуатационной надежности устройства.
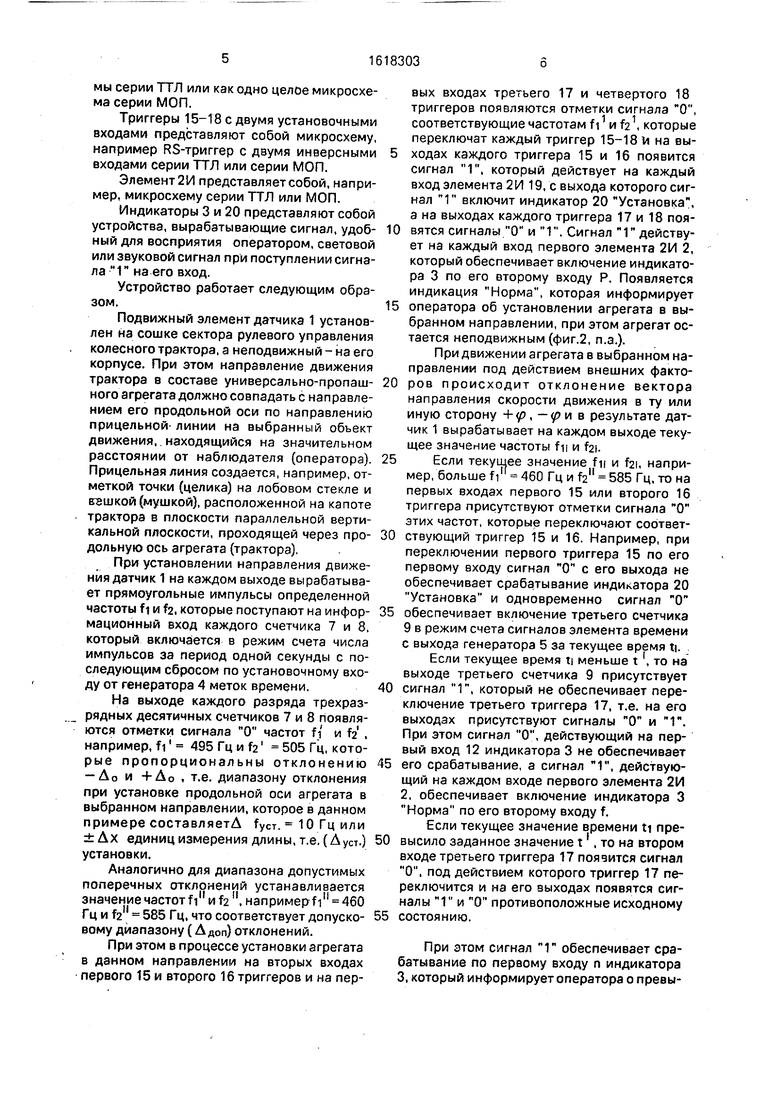
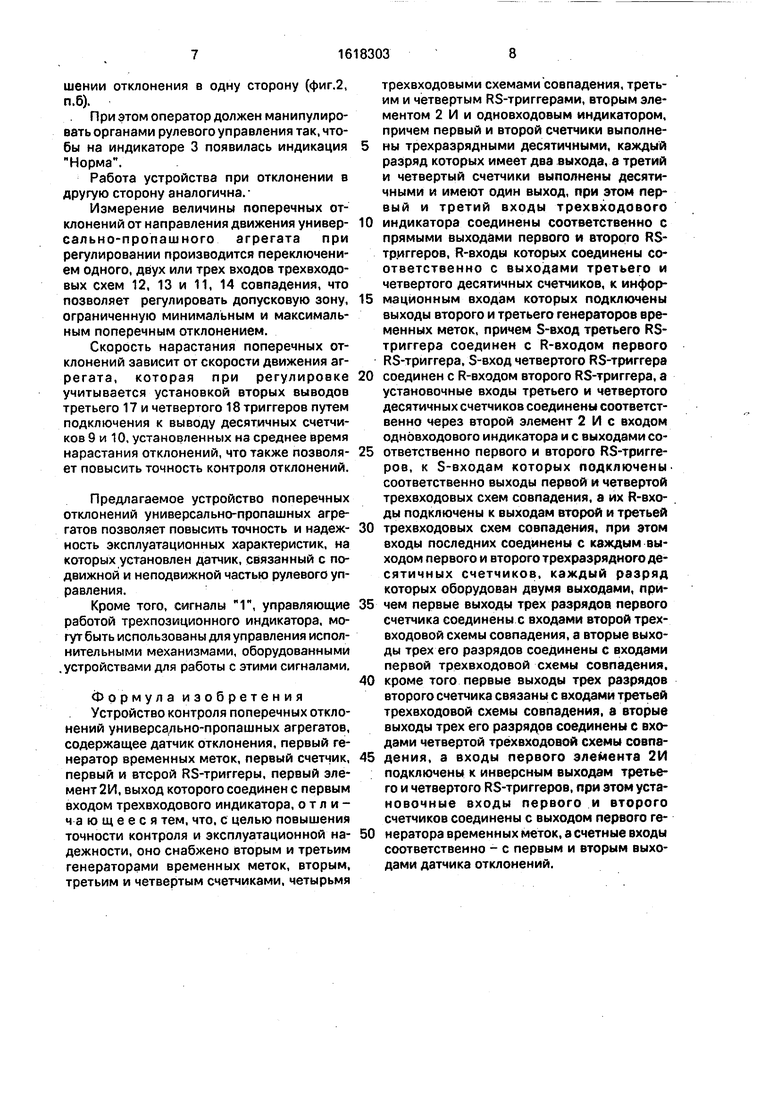
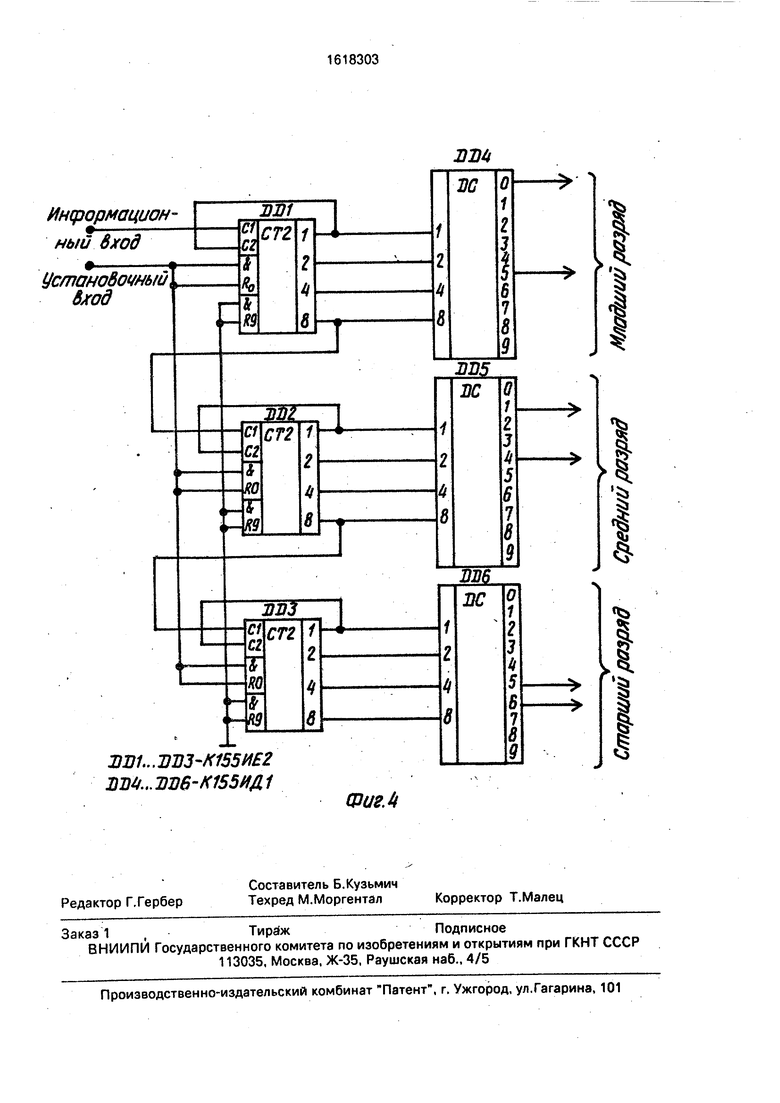
На фиг.1 приведена схема устройства; на фиг.2 - характеристика работы устройства, где изображено: отклонение вектора направления скорости от его направления движения, поперечное отклонение A(L), частота генераторов f, текущее время т, пунктирными стрелками отмечено направление отклонения, выходные сигналы блоков; на фиг.З - схема выполнения генераторов временных меток; на фиг.4 - схема выполнения трехразрядных десятичных счетчиков.
Устройство контроля поперечных отклонений универсально-пропашных агрегатов содержит датчик 1, элемент 2И 2, выход которого соединен с вторым входом трех- входового индикатора 3, первый 4, второй 5 и третий 6 генераторы, первый 7, второй 8, третий 9 и четвертый 10 счетчики с информационным и установочным входами, четыре трехвходовые 11-14 совпадения, первый 1.5, второй 16, третий 17 и четвертый 18 триггеры с двумя установочными входами, второй элемент 2И 19, одновходовый индикатор 20, каждый генератор 4-6 оборудован выводом элемента времени, первый 7 и второй 8 счетчики выполнены трехразряд- нымй десятичными, каждый разряд которых оборудован двумя выходами, третий 9 и четвертый 10 счетчики выполнены десятичными, а оборудованы одним выводом, первый и третий входы индикатора 3 содержат преобразующую цепочку, каждая из которых имеет последовательно соединенные триггеры 17 и 18, вторые установочные входы которых соединены с выводами десятичных счетчиков 9 и 10 соответственно к информационным входам которых подключены генераторы 5 и 6 элементов времени соответственно, первый установочный вход третьего триггера 17 соединен с вторым установочным входом первого триггера 15. Первый установочный вход четвертого триггера 18 соединен с вторым установочным входом второго триггера 16. Установочные входы третьего 9 и четвертого 10 десятичных счетчиков соединены с каждым входом второго элементами 19, включенного в цепи одновходового индикатора 20, и с выходом каждого первого 15 и второго 16 триггеров, к каждым установочным входам которых подключены выходы трехвходовыхсхем 11- 14 совпадения, входы которых соединены с каждым выводом первого 7 и второго 8 трехразрядных десятичных счетчиков, каждый разряд которых оборудован двумя выходами. Первые выходы первого счетчика 7 соединены с входами второй схемы 12
совпадения, в вторые выходы его соединены с входами первой схемы 11 совпадения. Первые выходы второго счетчика 8 соединены с входами третьей схемы 13 совпадения, а вторые выходы его соединены с входами
0 четвертой схемы 14 совпадения. Входы первого элемента 2И 2 подключены к другим выводам третьего 17 и четвертого 18 триггеров.
Датчик 1 представляет собой преобра5 зователь первичной информации, оборудованный двумя выводами, на которых вырабатываются прямоугольные импульсы длительностью, пропорциональной отклонению измеряемой величины перемещения
0 подвижного элемента датчика относительно неподвижного его элемента. Например, подвижный элемент датчика связан с сошкой рулевого управления агрегата, а неподвижный элемент-с корпусом агрегата, при этом
5 на одном выводе частота импульсов увеличивается, а на другом уменьшается или наоборот.
Генераторы 4-6 временных меток представляют собой генераторы прямоугольных
0 импульсов с делителем, вырабатывающим прямоугольные импульсы, длительностью сигнала О, например, равного одной секунде с коротким по длительности сигналов 1й. Он выполнен на микросхемах серии
5 ТТЛ (фиг.З).
Трехразрядные десятичные счетчики 7 и 8с информационным и установочным входом выполнены, например, на трех последовательно соединенных двоично-десятичных
0 счетчиках с информационным и установочным входом, к выходам которых подключены двоично-десятичные дешифраторы, образующие три разряда с двумя выходами и выполнены, например, на микросхемах се5 рии ТТЛ (фиг.4) или серии МОП.
Трехвходовые схемы 11-14 совпадения представляют собой логические элементы ЗИ-НЕ, вырабатывающие на выходе сигнал О, например при .использовании микро0 схем серии ТТЛ, каждый вход элемента ЗИНЕ оборудован элементом НЕ, т.е. инвертором, а при использовании в качестве предыдущих микросхем серии МОП трех- в.ходовая схема совпадения представляет
5 элемент ЗИ-НЕ.
Десятичные счетчики 9 и 10 представляют собой двоично-десятичный счетчик с информационным и установочным входом, выполненный совместно с двоично-десятичным дешифратором, например, микросхемы серии ТТЛ или как одно целое микросхема серии МОП.
Триггеры 15-18 с двумя установочными входами представляют собой микросхему, например RS-триггер с двумя инверсными входами серии ТТЛ или серии МОП.
Элемент2И представляет собой, например, микросхему серии ТТЛ или МОП.
Индикаторы 3 и 20 представляют собой устройства, вырабатывающие сигнал, удобный для восприятия оператором, световой или звуковой сигнал при поступлении сигнала 1Н на его вход.
Устройство работает следующим образом.
Подвижный элемент датчика 1 установлен на сошке сектора рулевого управления колесного трактора, а неподвижный - на его корпусе. При этом направление движения трактора в составе универсально-пропашного агрегата должно совпадать с направлением его продольной оси по направлению прицельной- линии на выбранный объект движения,. находящийся на значительном расстоянии от наблюдателя (оператора). Прицельная линия создается, например, отметкой точки (целика) на лобовом стекле и ввшкой (мушкой), расположенной на капоте трактора в плоскости параллельной вертикальной плоскости, проходящей через продольную ось агрегата (трактора).
При установлении направления движения датчик 1 на каждом выходе вырабатывает прямоугольные импульсы определенной частоты fi и f2, которые поступают на информационный вход каждого счетчика 7 и 8, который включается в режим счета числа импульсов за период одной секунды с последующим сбросом по установочному входу от генератора 4 меток времени.
На выходе каждого разряда трехразрядных десятичных счетчиков 7 и 8 появляются отметки сигнала О частот fj и fa , например, ft 495 Гц и f2 505 Гц, кото- рые пропорциональны отклонению - До и 4-АО , т.е. диапазону отклонения при установке продольной оси агрегата в выбранном направлении, которое в данном примере составляетД туст. 10 Гц или ±Дх единиц измерения длины, т.е. (Дуст.) установки.
Аналогично для диапазона допустимых поперечных отклонений устанавливается значение частот f i и f2 . например 11 460 Гц и 585 Гц, что соответствует допуско- вому диапазону (ДДОп) отклонений.
При этом в процессе установки агрегата в данном направлении на вторых входах первого 15 и второго 16 триггеров и на первых входах третьего 17 и четвертого 18 триггеров появляются отметки сигнала О, соответствующие частотам fi1 и fz1, которые переключат каждый триггер 15-18 И на вы5 ходах каждого триггера 15 и 16 появится сигнал 1, который действует на каждый вход элемента 2 И 19, с выхода которого сигнал 1 включит индикатор 20 Установка, а на выходах каждого триггера 17 и 18 поя0 вятся сигналы О и 1. Сигнал 1 действует на каждый вход первого элемента 2И 2, который обеспечивает включение индикатора 3 по его второму входу Р. Появляется индикация Норма, которая информирует
5 оператора об установлении агрегата в выбранном направлении, при этом агрегат остается неподвижным (фиг.2, п.а.).
При движении агрегата в выбранном направлении под действием внешних факто0 ров происходит отклонение вектора направления скорости движения в ту или иную сторону , - р и в результате датчик 1 вырабатывает на каждом выходе текущее значение частоты fn и fai.
5 Если текущее значение fn и fai, например, больше fi-460 Гц и f2ll 585 Гц, то на первых входах первого 15 или второго 16 триггера присутствуют отметки сигнала О этих частот, которые переключают соответ0 ствующий триггер 15 и 16. Например, при переключении первого триггера 15 по его первому входу сигнал О с его выхода не обеспечивает срабатывание индикатора 20 Установка и одновременно сигнал О
5 обеспечивает включение третьего счетчика
9 в режим счета сигналов элемента времени
с выхода генератора 5 за текущее время ц.
Если текущее время ti меньше t , то на
выходе третьего счетчика 9 присутствует
0 сигнал 1, который не обеспечивает переключение третьего триггера 17, т.е. на его выходах присутствуют сигналы О и 1. При этом сигнал О, действующий на первый вход 12 индикатора 3 не обеспечивает
5 его срабатывание, а сигнал 1, действующий на каждом входе первого элемента 2И
Если текущее значение времени ti npe0 высило заданное значение t , то на втором входе третьего триггера 17 появится сигнал О, под действием которого триггер 17 переключится и на его выходах появятся сигналы 1 и О противоположные исходному
5 состоянию.
При этом сигнал 1 обеспечивает срабатывание по первому входу п индикатора
При этом оператор должен манипулировать органами рулевого управления так, чтобы на индикаторе 3 появилась индикация Норма.
Работа устройства при отклонении в другую сторону аналогична.Измерение величины поперечных отклонений от направления движения универ- сально-пропашного агрегата при регулировании производится переключением одного, двух или трех входов трехвходо- вых схем 12, 13 и 11, 14 совпадения, что позволяет регулировать допусковую зону, ограниченную минимальным и максимальным поперечным отклонением.
Скорость нарастания поперечных отклонений зависит от скорости движения аг- регата, которая при регулировке учитывается установкой вторых выводов третьего 17 и четвертого 18 триггеров путем подключения к выводу десятичных счетчиков 9 и 10, установленных на среднее время нарастания отклонений, что также позволяет повысить точность контроля отклонений.
Предлагаемое устройство поперечных отклонений универсально-пропашных агрегатов позволяет повысить точность и надежность эксплуатационных характеристик, на которых установлен датчик, связанный с подвижной и неподвижной частью рулевого управления.
Кроме того, сигналы Г, управляющие работой трехпозиционного индикатора, могут быть использованы для управления исполнительными механизмами, оборудованными . устройствами для работы с этими сигналами,
Формула изобретения Устройство контроля поперечных отклонений универсально-пропашных агрегатов, содержащее датчик отклонения, первый генератор временных меток, первый счетчик, первый и второй RS-триггеры, первый элемент 2И, выход которого соединен с первым входом трехвходового индикатора, отличающееся тем, что, с целью повышения точности контроля и эксплуатационной надежности, оно снабжено вторым и третьим генераторами временных меток, вторым, третьим и четвертым счетчиками, четырьмя
трехвходовыми схемами совпадения, третьим и четвертым RS-триггерами, вторым элементом 2 И и одновходовым индикатором, причем первый и второй счетчики выполнены трехразрядными десятичными, каждый разряд которых имеет два выхода, а третий и четвертый счетчики выполнены десятичными и имеют один выход, при этом первый и третий входы трехвходового
индикатора соединены соответственно с прямыми выходами первого и второго RS- тр.иггеров, R-входы которых соединены соответственно с выходами третьего и четвертого десятичных счетчиков, к информацйонным входам которых подключены выходы второго и третьего генераторов временных меток, причем S-вход третьего RS- триггера соединен с R-входом первого RS-триггера, S-вход четвертого RS-триггера
соединен с R-входом второго RS-триггера, а установочные входы третьего и четвертого десятичных счетчиков соединены соответственно через второй элемент 2 И с входом одновходового индикатора и с выходами соответственно первого и второго RS-тригге- ров, к S-входам которых подключены соответственно выходы первой и четвертой трехвходовых схем совпадения, а их R-входы подключены к выходам второй и третьей
трехвходовых схем совпадения, при этом входы последних соединены с каждым выходом первого и второго трехразрядного де- сятичных счетчиков, каждый разряд которых оборудован двумя выходами, причем первые выходы трех разрядов первого счетчика соединены с входами второй трех- входовой схемы совпадения, а вторые выходы трех его разрядов соединены с входами первой трехвходовой схемы совпадения.
кроме того первые выходы трех разрядов второго счетчика связаны с входами третьей трехвходовой схемы совпадения, а вторые выходы трех его разрядов соединены с входами четвертой трехвходовой схемы совпадения, а входы первого элемента 2И подключены к инверсным выходам третьего и четвертого RS-триггеров, при этом уста- новочные входы первого и второго счетчиков соединены с выходом первого генератора временных меток, а счетные входы соответственно - с первым и вторым выходами датчика отклонений.
яяц I ит 2727J
:iM}rf№ h f l
ЯЯ1-К155ЛАЗ
27Л2... 27274 -К155ИЕ1 -127274
2727
i
№
Фиг.З
4
i
1
r-t 1
1 §
I
Д
I
I
| Сигнализатор загрузки двигателя | 1987 |
|
SU1495650A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
