Изобретение относится к контрольно-измерительной технике и предназначено для информационного контроля технологической скорости движения и может быть использовано при эксплуатации колесных и гусеничных тракторных агрегатов, работающих в реальном масштабе времени.
Известно устройство "Спидометр", содержащее датчик параметра, связанный с сигнализатором, содержащий преобразователь (см. авторское свидетельство СССР 1280548, кл G 01 С 22/02 от 07.05.1985 г.).
Недостатком известного устройства является наличие стрелочного индикатора скорости, связанного с электродвигателем, генератор которого связан с приводом от вторичного вала коробки передач, который вырабатывает переменное напряжение, пропорциональное скорости движения, подаваемое через преобразователь с усилителем на электродвигателе, связанный со стрелочным индикатором. Показания стрелочного индикатора, в зависимости от технологической скорости движения машинно-тракторного агрегата при различных технологических скоростях работы МТА достигает значительных погрешностей, которые достигают порядка от 4,8 до 18%, что существенно отрицательно влияет на технологию возделывания сельскохозяйственных культур.
Наиболее близким из известных устройств по технической сущности и достигаемому результату является устройство контроля технологической скорости машинно-тракторного агрегата, содержащее датчик скорости, подключенный к сигнализатору, причем датчик скорости содержит преобразователь вращения, коммутационные элементы (см. авторское свидетельство СССР 1355877, кл. G 01 L 23/22 от 27.12.1985 г.).
Недостатком известного устройства является наличие сумматора, связанного с дешифратором и схемой управления, так как n-разрядный двоичный код дешифратора не определяется математической зависимостью между положениями коммутационных элементов и требуемым значением технологической скорости, код которой поступает на первый вход n-разрядного сумматора, а другая связь сумматора со схемой управления, связанной через одновибратор с двоичным счетчиком в последовательной цепи между преобразователем и схемой сравнения двоичных кодов, обеспечивает только работу двоичного счетчика, n-разрядный код которого поступает на второй вход схемы сравнения. Присутствие двоичного кода от коммутационных элементов (функциональная зависимость от установленного значения заданной скорости) на первом входе сумматора и присутствие двоичного кода от схемы управления (функциональная зависимость от управления по времени) на втором входе сумматора приводит к образованию нового двоичного кода на первом входе схемы сравнения двоичных кодов, на второй вход которой поступает код за время одной секунды от преобразователя вращения через двоичный счетчик. При этом, схема сравнения двоичных кодов вырабатывает или сигнал "l" длительностью "τ2", или сигнал "0" длительностью "τ1", длительность которых существенно отличается от пропорциональной длительности сигналов действительной скорости движения "τ1" и "τ2", так как длительность сигнала "1" с выхода сумматора не имеет достоверного значения о задаваемой технологической скорости, ибо не учтена зависимость частоты следования импульсов от преобразователя вращения в зависимости от задаваемой технологической скорости движения. Вследствие чего происходит недостоверное мигание индикатора, как в режиме "норма", так и при отклонении в режиме "больше" или "меньше", что приводит к значительным искажениям результатов восприятия информации оператором (трактористом) и не обеспечивает требуемой точности при соответствующих его действиях по управлению работой двигатели и коробки переключения передач.
Задачей заявляемого изобретения является расширение функциональных возможностей, повышение точности при достоверном восприятии информации с индикатора.
Поставленная цель достигается тем, что сигнализатор технологической скорости машинно-тракторного агрегата содержит датчик скорости, подключенный к сигнализатору, причем датчик скорости содержит преобразователь вращения, коммутационные элементы Согласно изобретению в него дополнительно введены второй преобразователь вращения, генератор элемента времени, два блока выбора технологического режима работы, анализатор отклонения параметра, сигнализатор буксования ведущих колес, при этом каждый преобразователь вращения соединен с разрядной шиной блока выбора технологического режима работы, вход "сброс" преобразователей вращения соединен с первым выходом генератора элемента времени, второй выход которого соединен через коммутационные элементы с адресной шиной каждого блока выбора технологического режима работы, выходы которых соединены с анализатором отклонения параметра, соединенного с сигнализатором буксования ведущих колес трактора.
Скорость технологического режима работы МТА определяется по формуле
Vi=A•Fi, м•Гц=м/с,
где i - порядковый номер технологического режима, о.е.;
A=(1-Pi) L/K - параметрический коэффициент, м;
Fi - частота импульсов преобразователя вращения, Гц;
Рi - вероятность буксования колес, о.е.;
L - длина окружности колеса, м;
К - коэффициент передачи, о.е.
В датчик скорости введены два счетных устройства, элемент "2И", три импульсных счетчика, один из которых включен через элемент "2И" на входе двух других счетчиков, каждый из которых включен через счетное устройство, информационные входы которых соединены с выходом преобразователей вращения, а установочные входы подключены к сигнализатору.
Для соответствия заявленного объекта критерию "существенные отличия" проведен поиск по классу МКИ G 01 Р 3/00, G 01 С 22/02, А 01 В 69/00, А 01 В 69/04, G 01 L 23/22.
В результате поиска заявителем не обнаружены технические решения, в которых имеются признаки, сходные с признаками, отличающими заявленное решение от прототипа.
Сущность предлагаемого изобретения поясняется чертежом, на котором изображена блок-схема сигнализатора технологической скорости машинно-тракторного агрегата.
Сигнализатор технологической скорости машинно-тракторного агрегата содержит датчик параметра 1, подключенный (i), (j), (k), (l), (m), (r) к сигнализатору 2. Датчик скорости 1 содержит преобразователь вращения 3, второй преобразователь вращения 4, генератор элемента времени 5, коммутационные элементы 6, два блока выбора технологического режима работы 7, 8, анализатор отклонения параметра 9, сигнализатор буксования ведущих колес 10, 11. Каждый преобразователь вращения 3, 4 соединен (а) и (в) с разрядной шиной блока выбора технологического режима работы 7, 8, вход "сброс" (с) преобразователей вращения 3, 4 соединен с выходом генератора элемента времени 5, второй выход (d) которого соединен через коммутационные элементы 6 с адресной шиной каждого блока выбора технологического режима работы 7, 8, выходы которых (е), (f), (g), (h) соединены с анализатором отклонения параметра 9, соединенного (n), (о), (р), (q) с сигнализатором буксования ведущих колес 10, 11. Скорость технологического режима работы МТА определяется по формуле
Vi=A•Fi, м•Гц=м/с,
где i - порядковый номер технологического режима, о.е.;
А=(1-Рi) L/K - параметрический коэффициент, м;
Fi - частота импульсов преобразователя вращения, Гц;
Pi - вероятность буксования колес, о.е.;
L - длина окружности колеса, м;
К - коэффициент передачи, о.е.
Датчик скорости 1 имеет два счетных устройства 12, 13, элемент "2И" 14, три импульсных счетчика 15, 16, 17, один из которых 16 включен через элемент "2И" на входе двух других счетчиков 15 и 17, каждый из которых 15 и 17 включен через счетное устройство 12, 13, информационные входы (а) и (в) которых соединены с выходом преобразователей вращения 3, 4, а установочные входы (r) и (m) подключены к сигнализатору 2. Преобразователь вращения 3, 4 представляет собой бесконтактное устройство или электроконтакт, выполненный в виде изолированной от корпуса щетки, скользящей по коллектору, на котором закреплены n-пластин изоляторов по окружности корпуса коллектора. Электроконтакт (коллекторная щетка) соединен со средней точкой делителя напряжения в последовательной цепи одновибратора и n-разрядного двоично-десятичного счетчика, выходной сигнал которого представляет n-разрядный двоично-десятичный код, который зависит от угловой скорости вращения колеса ω=V/R или от линейной скорости движения V = ωR = 2πfR = πDF, где D - диаметр колеса трактора За один оборот колесо проходит путь S=π•D (м) и коллектор, связанный с осью вращения колеса, через коллекторную щетку выдает n-импульсов, поступающих через одновибратор на счетный вход n-разрядного двоично-десятичного счетчика, выходные импульсы которого используются для дальнейшей обработки полученной информации. Одновибратор используется для устранения эффекта "дребезга" скользящей коллекторной щетки. Известно, что если колесо тягового средства за один оборот в секунду имеет линейную скорость  а материальное тело, движущееся со скоростью V0= 1 км/ч= 0,278 (м/с=мГц), то их отношение определяется коэффициентом передачи Vк/Vо=К. Например, для трактора ЛТЗ-155 D=1,46 м; F=1 Гц; Vк=πDF=4,59 (м/с=мГц),
а материальное тело, движущееся со скоростью V0= 1 км/ч= 0,278 (м/с=мГц), то их отношение определяется коэффициентом передачи Vк/Vо=К. Например, для трактора ЛТЗ-155 D=1,46 м; F=1 Гц; Vк=πDF=4,59 (м/с=мГц), 
Округляя это значение, получим К=16, это означает, что коэффициент передачи (К) определяется количеством импульсов за один оборот колеса в единицу времени, при этом цена деления одного импульса равна πD/16=4,59/16= 0,287 (м), что соответствует скорости Vi=0,287•Fi (м/с=мГц), где i=1, 2, 3.. . . При учете вероятности отклонения технологической скорости от заданного значения или при наличии буксования колес, равной Pi, получим, что (1-Pi)=q - вероятность, которая характеризует отсутствие буксования колес. Так как L/K=0,287 (м), то Vi=(1-Pi)•L/K (м•Гц). Следовательно
Vi=A•Fi (м•Гц=м/с),
где i - порядковый номер технологического режима, о.е.;
A=(1-Pi) L/K - параметрический коэффициент, м;
Fi - частота импульсов преобразователя вращения, Гц;
Рi - вероятность буксования колес, о.е.;
L - длина окружности колеса, м;
К - коэффициент передачи, о.е.
Известно, что функциональная зависимость двух переменных величин Vi и Fi выражается, в общем случае, уравнением Vi=AFi, где А - параметрический коэффициент, равный (1-Рi)•L/K. График этой прямой пропорциональности есть прямая линия, проходящая через начало координат, где К - коэффициент пропорциональности, выражающийся угловым коэффициентом К=tgα, где α - угол прямой линии с осью абсцисс, равный  При наличии буксования (Pi) и дальнейшего его увеличения, угловой коэффициент пропорциональности уменьшается и прямая линия зависимости Vi=A•Fi приближается к оси абсцисс, т.к. уменьшается скорость движения, вплоть до остановки тягового средства. Генератор элемента времени 5 представляет собой известное устройство, выполненное на последовательно соединенных элементах "2И-НЕ", между которыми включен кварцевый резонатор определенной частоты, выход второго элемента "2И-НЕ" соединен через конденсатор с входом первого элемента "2И-НЕ", связанного через резистор с корпусом, к которому подключен резистор на входе второго элемента "2И-НЕ". Выход первого элемента "2И-НЕ" соединен с входом третьего элемента "2И-НЕ", выход которого подключен на счетный вход последовательно соединенных n-двоично-десятичных счетчиков, каждый из которых после подсчета, например, 10 импульсов устанавливается в исходное нулевое состояние, и процесс повторяется. В зависимости от частоты кварцевого резонатора применяется n-последоватепьно соединенных двоично-десятичных счетчиков, за счет которых производится подсчет импульсов за интервал времени, равный одной секунде, с выдачей на выходе (с) коротких импульсов "сброс" "0", следующих через одну секунду. На выходе (d) выдаются импульсы низкого уровня "0" длительностью в одну секунду. Коммутационные элементы 6 представляют собой широко известные n1-полюсные, n2-позиционные переключатели независимых цепей, например, одноплатный переключатель, плата которого имеет определенное количество переключаемых контактов по числу выполняемых операций технологического режима работы, зависящих от других технологических параметров, согласно ТУ на проведение сельхозяйственных работ. Выходной сигнал коммутационных элементов 6 представляет собой сигнал низкого уровня "0", подаваемый на выбранную адресную линию блока выбора технологического режима работы 7, 8. Более подробное описание блока 6 "Коммутационные элементы" выходит за рамки данной заявки. Блок выбора технологического режима работы 7, 8 представляет собой известные устройства, предназначенные для хранения информации в двоичном коде, состоящем из нескольких разрядов, и выполненные в виде матрицы памяти запоминающих устройств (ЗУ), в частности, перепрограммируемые запоминающие устройства (ПЗУ), позволяющие изменять хранимую информацию многократно. В данном устройстве используется диодное ПЗУ, в котором выбор нужного кода производится путем штекерного подключения диодов на соответствующих точках пересечения адресных и разрядных линий. При этом диоды, соединяющие разрядные линии и выбранные адресные линии в соответствии с кодируемой информацией, имеют сигнал "0" на соответствующих разрядных линиях. Если диода в точке пересечения нет (не установлен штекер в соответствующей точке пересечения разрядной и выбранной адресной линии), то на выходе соответствующей линии устанавливается сигнал "1". Например, в ПЗУ записан код числа импульсов, вырабатываемых преобразователем вращения 3 или 4 в допустимом пределе (±5%) отклонения скорости движения от заданной скорости, равной 5 км/ч при отсутствии буксования, т. е. (-5%) F=16,6 Гц, код 0001 0000, 0110; (0%) F=17,4 Гц, код 0001 0001, 0100; (+5%) F=18,3 Гц, код 0001 0010, 0011. При буксовании (+10%) F= 19,3 Гц, код 0001 0011, 0011, при буксовании (+15%) F=20,5 Гц, код 0001 0100, 0101 для данного типа трактора. Для другого типа трактора код переписывается путем установки в другие точки (гнезда) пересечения адресных и разрядных линий. Анализатор отклонения параметра 9 представляет собой одно из известных устройств сравнения n-сигналов, например, содержащее n-входовые элементы "И-НЕ" (по количеству преобразователей, каждый из которых состоит из трех n-входовых элементов "И-НЕ"), соединенные с выходом (е) и (g) блока выбора технологического режима работы 7, 8, код которых определяет отклонение скорости движения от оптимального значения в заданных пределах optV-max +max при отсутствии буксования и два других n-входовых элемента "И-НЕ", соединенные соответственно с выходом (f) блока 7 и выходом (h) блока 8, код которых определяет буксование в заданных пределах P-max +max.
При наличии буксования (Pi) и дальнейшего его увеличения, угловой коэффициент пропорциональности уменьшается и прямая линия зависимости Vi=A•Fi приближается к оси абсцисс, т.к. уменьшается скорость движения, вплоть до остановки тягового средства. Генератор элемента времени 5 представляет собой известное устройство, выполненное на последовательно соединенных элементах "2И-НЕ", между которыми включен кварцевый резонатор определенной частоты, выход второго элемента "2И-НЕ" соединен через конденсатор с входом первого элемента "2И-НЕ", связанного через резистор с корпусом, к которому подключен резистор на входе второго элемента "2И-НЕ". Выход первого элемента "2И-НЕ" соединен с входом третьего элемента "2И-НЕ", выход которого подключен на счетный вход последовательно соединенных n-двоично-десятичных счетчиков, каждый из которых после подсчета, например, 10 импульсов устанавливается в исходное нулевое состояние, и процесс повторяется. В зависимости от частоты кварцевого резонатора применяется n-последоватепьно соединенных двоично-десятичных счетчиков, за счет которых производится подсчет импульсов за интервал времени, равный одной секунде, с выдачей на выходе (с) коротких импульсов "сброс" "0", следующих через одну секунду. На выходе (d) выдаются импульсы низкого уровня "0" длительностью в одну секунду. Коммутационные элементы 6 представляют собой широко известные n1-полюсные, n2-позиционные переключатели независимых цепей, например, одноплатный переключатель, плата которого имеет определенное количество переключаемых контактов по числу выполняемых операций технологического режима работы, зависящих от других технологических параметров, согласно ТУ на проведение сельхозяйственных работ. Выходной сигнал коммутационных элементов 6 представляет собой сигнал низкого уровня "0", подаваемый на выбранную адресную линию блока выбора технологического режима работы 7, 8. Более подробное описание блока 6 "Коммутационные элементы" выходит за рамки данной заявки. Блок выбора технологического режима работы 7, 8 представляет собой известные устройства, предназначенные для хранения информации в двоичном коде, состоящем из нескольких разрядов, и выполненные в виде матрицы памяти запоминающих устройств (ЗУ), в частности, перепрограммируемые запоминающие устройства (ПЗУ), позволяющие изменять хранимую информацию многократно. В данном устройстве используется диодное ПЗУ, в котором выбор нужного кода производится путем штекерного подключения диодов на соответствующих точках пересечения адресных и разрядных линий. При этом диоды, соединяющие разрядные линии и выбранные адресные линии в соответствии с кодируемой информацией, имеют сигнал "0" на соответствующих разрядных линиях. Если диода в точке пересечения нет (не установлен штекер в соответствующей точке пересечения разрядной и выбранной адресной линии), то на выходе соответствующей линии устанавливается сигнал "1". Например, в ПЗУ записан код числа импульсов, вырабатываемых преобразователем вращения 3 или 4 в допустимом пределе (±5%) отклонения скорости движения от заданной скорости, равной 5 км/ч при отсутствии буксования, т. е. (-5%) F=16,6 Гц, код 0001 0000, 0110; (0%) F=17,4 Гц, код 0001 0001, 0100; (+5%) F=18,3 Гц, код 0001 0010, 0011. При буксовании (+10%) F= 19,3 Гц, код 0001 0011, 0011, при буксовании (+15%) F=20,5 Гц, код 0001 0100, 0101 для данного типа трактора. Для другого типа трактора код переписывается путем установки в другие точки (гнезда) пересечения адресных и разрядных линий. Анализатор отклонения параметра 9 представляет собой одно из известных устройств сравнения n-сигналов, например, содержащее n-входовые элементы "И-НЕ" (по количеству преобразователей, каждый из которых состоит из трех n-входовых элементов "И-НЕ"), соединенные с выходом (е) и (g) блока выбора технологического режима работы 7, 8, код которых определяет отклонение скорости движения от оптимального значения в заданных пределах optV-max +max при отсутствии буксования и два других n-входовых элемента "И-НЕ", соединенные соответственно с выходом (f) блока 7 и выходом (h) блока 8, код которых определяет буксование в заданных пределах P-max +max.
Выходы первых n-входовых элементов "И-НЕ" (соответствующие максимальному отклонению скорости) и выходы третьих n-входовых элементов "И-НЕ" (соответствующие минимальному отклонению скорости) соединены с каждым входом элемента "2И-НЕ", выходы (i) и (k) которых подключены к сигнализатору 2, к которому подключены выходы (j) и (1) вторых n-входовых элементов "И-НЕ". Выходы двух других n-входовых элементов "И-НЕ" каждого канала (f) и (h), соответствующие минимальному или максимальному буксованию, подключены к S-входу каждого, одного из четырех RS-триггеров, R-входы которых соединены с выходом одновибратора, включенного на выходе (m) сигнализатора 2. При движении с оптимальной скоростью n-разрядные коды оптимального значения технологической скорости поступают на вторые n-входовые элементы "И-НЕ" каждого канала, с выхода которого сигнал "0" или "1" поступает на вход (j) и (1) сигнализатора 2, а разрядные коды максимального значения отклонения от заданной технологической скорости поступают на первые n-входовые элементы "И-НЕ" каждого канала, с выхода которых сигнал "0" или "1" поступает на один элемент "2И-НЕ", выходной сигнал "1" или "0" которого подается на вход (k) сигнализатора 2, и соответственно, разрядные коды минимального значения отклонения поступают на третьи n-входовые элементы "И-НЕ" каждого канала", с выхода которых сигнал "0" или "1" аналогично поступает на другой элемент "2И-НЕ", выход которого связан с входом (i) сигнализатора 2. Сигнализатор 2 представляет собой известное устройство, вырабатывающее как световой, так и звуковой сигнал, удобный для восприятия оператором в трехпозиционной системе индикации, т. е. в каждом из режимов индикации "меньше", "норма", "больше" появляется звуковой сигнал разного тона. Сигнализатор 2, например, может быть выполнен на оконечных элементах известной схемы сигнализатора загрузки двигателя, содержащей RS-триггер в каждой преобразующей цепочке, входы (S) которых подключены к выходам (i) и (k) анализатора отклонения параметра 9. Прямые выходы каждого RS-триггера соединены, соответственно, с элементами индикации "меньше" или "больше", к которым подключен элемент "2И-НЕ", входы (m) и (r) которого подключены к установочным входам (m) и (r) счетных устройств 12, 13. Выход элемента "2И-НЕ" соединен с элементами индикации "норма", R-входы (j) и (1) каждого RS-триггера сигнализатора 2 соединены с анализатором отклонения параметра 9, в котором прямые выходы (n), (о), (р), (q) каждого из четырех RS-триггеров подключены на входы (n) и (о) одного сигнализатора буксования ведущих колес 10, входы (р) и (q) другого сигнализатора буксования ведущих колес 11 тягового средства. Сигнализаторы буксования ведущих колос 10, 11 оборудованы световой индикацией с указанием фиксируемого цифрового значения буксования, выраженные в процентах и сопровождаемые прерывистым звуковым сигналом, частота которого при достижении предельного значения буксования увеличена. Каждое счетное устройство 12, 13 представляет собой схему трехразрядных десятичных счетчиков, которые содержат двоично-десятичный счетчик с информационным (а), (в) и установочным входом (r), (m), выполненные с двоично-десятичным дешифратором. Установочные входы (r) и (m) подключены к элементам индикации "больше" (m) и "меньше" (r) сигнализатора 2, которые в момент индикации одного или другого значения разрешают работу импульсного счетчика 15 или 16 в режимах "больше" или "меньше" работы тягового средства. При работе тягового средства в допустимых пределах отклонения скорости движения, включается в работу импульсный счетчик 16, соединенный с входом элемента "2И-НЕ" 14, входы которого соединены, соответственно, с выходом счетных устройств 12, 13, которые вырабатывают импульсы высокого уровня с определенной частотой (Гц), пропорциональной пройденному пути (м). Импульсные счетчики 15, 16, 17 представляют собой широко известные электромеханические устройства, состоящие из n-разрядных дисков с цифровым обозначением, приводимые в действие при помощи кинематики и импульсного электромагнита.
Сигнализатор технологической скорости машинно-тракторного агрегата работает следующим образом. Сигнализатор установлен на колесном тяговом средстве. Перед началом движения машинно-тракторного агрегата оператор (тракторист) включает источник питания сигнализатора 2 и с помощью коммутационных элементов 6 устанавливает требуемый технологический режим работы агрегата. При этом, генератор элемента времени 5 с выхода (с) выдает короткие импульсы низкого уровня "0" на вход "сброс" каждого преобразователя вращения 3, 4 и одновременно с выхода (d) поступают импульсы низкого уровня "0" длительностью в одну секунду, которые поступают на коммутационные элементы 6. Сигнал "0" подается на адресные линии постоянного запоминающего устройства (ПЗУ) каждого блока выбора технологического режима работы 7, 8, в которых разрядные линии находятся под потенциалом низкого уровня "0", т.к. преобразователи вращения 3, 4 остаются неподвижными и n-разрядные двоично-десятичные счетчики каждого преобразователя 3, 4 на выходе образуют код низкого уровня "0". При этом на выходах (е), (f), (g), (h) каждого блока выбора технологического режима работы 7, 8 присутствуют кодовые сигналы "0", которые поступают на n-входовые элементы "И-НЕ" анализатора отклонения параметра 9. При этом анализатор выдает на выходах (i), (к) сигнал "0", а на выходах (j), (l), (r), (m), (n), (о), (р), (q) выдает сигнал "1". Сигналы "0" с выходов (j), (k) действуют на S-входы RS-триггеров сигнализатора 2 и включают световую индикацию "больше" и "меньше", что свидетельствует о неподвижности преобразователей вращения 3, 4, т.е. отсутствие движения тягового средства При движении машинно-тракторного агрегата из исходного положения (движение без буксования) преобразователи вращения 3, 4 вырабатывают n-разряпные двоично-десятичные коды, каждый из которых имеет прямую пропорциональную зависимость от скорости технологического режима работы МТА, определяемой формулой
Vi=А•Fi (м•Гц=м/с),
где i - порядковый номер технологического режима, о.е.,
А=(1-Pi)L/K - параметрический коэффициент, м,
Fi - частота импульсов преобразователя вращения, Гц;
Pi - вероятность буксования колес, о. е.;
L - длина окружности колеса, м;
К - коэффициент передачи, о.е.
При Pi= 0 - буксование отсутствует, получим, что А=L/K, следовательно, скорость технологического режима работы МTА без буксования определяется выражением
Vi=Fi•L/K (м•Гц=м/c).
При этом импульсы с выхода (а) и (в) преобразователей вращения 3, 4 поступают на разрядные линии блоков выбора технологического режима работы 7, 8, на адресных линиях которых присутствуют коды технологической скорости МТА, установленной оператором (трактористом) при помощи коммутационных элементов 6. Поступающие текущие коды с выходов (а) и (в) преобразователей 3, 4, проходя через блоки выбора технологического режима работы 7, 8, воздействуют на n-входовые элементы "И-НЕ" анализатора отклонения параметра 9, на выходе (i) которого снимается сигнал "0" и появляется сигнал "1", индикация "больше" гаснет, а индикация "меньше" и соответствующий звуковой сигнал сигнализатора 2 действует до момента достижения МТА заданной технологической скорости. Индикация "меньше" гаснет, включается индикация "норма" и меняется звуковой сигнал. При достижении скорости движения, например, заданной 5 км/ч, преобразователи вращения 3, 4 выдают импульсы частотой F=17,4 (Гц) в допустимых пределах +5% и -5% от заданной скорости движения, т.е. скорости 4,75 км/ч соответствует частота F4,75= 16,6 (Гц), а скорости 5,25 км/ч соответствует частота F5,25= 18,3 (Гц). Импульсы F5,0=17,4 (Гц) с выхода (е) преобразователя 7 или с выхода (g) преобразователя 8 поступают на средние n-входовые элементы "И-НЕ" каждого анализатора отклонения параметра 9, на выходах (j) и (1) которых появляется сигнал "0", и каждый из них действует на R-входы первого и второго RS-триггера сигнализатора 2, устанавливая их в положение, при котором на прямых выходах RS-триггеров появляется сигнал "1", который действует на элемент "2И-НЕ" сигнализатора 2, с выхода которого сигнал "0" включит индикацию "норма". При дальнейшем движении с заданной скоростью технологического режима работы в допустимых пределах стабильно сохраняется индикация "норма" сигнализатора 2 и его звуковой сигнал при пониженном уровне. При движении со скоростью большей или меньшей, относительно заданных пределов, на первых или третьих n-входовых элементах "И-НЕ" анализатора отклонения параметра 9 появляется соответствующий код: 18,3 - 0001 0010, 0011, или код 16,6 - 0001 0000, 0110, который воздействует на n-входовые элементы "И-НЕ" первых или третьих n-входовых элементов "И-НЕ" анализатора отклонения параметра 9. Например, на первых n-входовых элементах "И-НЕ" каждого канала появляется соответствующий код, и на его выходе сигнал "0" инвертируется элементом "2И-НЕ" в сигнал "1", выход (k) которого не вызывает срабатывания по S-входу второго RS-триггера, включенного в цепи индикации "меньше" сигнализатора 2. При этом код, соответствующий нижнему пределу отклонения скорости, действующий на третьи элементы "И-НЕ" каждого канала анализатора отклонения параметра 9, приводит к тому, что эти элементы "И-НЕ" на выходе выдают сигналы "1", которые инвертируются элементом "2И-НЕ" в сигнал "0", выход (i) анализатора 9 переключает по S-входу первый RS-триггер сигнализатора 2. Появляется индикация "больше" в сопровождении соответствующего по тону и уровню звукового сигнала. Аналогично переключаются третьи n-входовые элементы "И-НЕ" каждого канала анализатора отклонения параметра 9, которые приводят к появлению сигнала "0" на выходе (k) анализатора отклонения параметра 9, который переключает второй RS-триггер, и сигнал "0" на его прямом выходе включит индикацию "меньше", сопровождаемую соответствующим звуковым сигналом. Одновременно с включением сигнализатора 2 в режимах "больше", "норма", "меньше" на его выходах (m) и (r) появляются сигналы "0", которые включают в работу двоично-десятичный счетчик с двоично-десятичным дешифратором счетных устройств 12, 13, на информационные входы (а) и (в) которых поступают импульсы с частотой, пропорциональной пройденному пути. Например, для трактора ЛТЗ-155 цена деления одного импульса равна 0,287 (м) и счетные устройства 12, 13 подсчитывают определенное количество импульсов, пропорциональных пройденному пути, и выдают импульсы, обеспечивающие срабатывание каждого импульсного счетчика 15, 16, 17, которые в момент той или иной индикации сигнализатора 2 производят подсчет пройденного пути в соответствующих режимах текущей технологической скорости движения. При движении с буксованием происходит увеличение угловой скорости вращения того или иного ведущего колеса тягового средства, оборудованного преобразователями вращения 3, 4, которые выдают импульсы частотой, превышающей допустимые пределы отклонения частоты, пропорциональной технологической скорости движения от заданного значения. При этом, сигнализатор 2 выдает в режимах индикации "меньше" или "больше" сигнал "0", действующий на установочные входы (r) или (m) счетного устройства 12 или 13, и индикация сигнализатора 2 "норма" гаснет. Происходит срабатывание счетчиков 15 или 17 раздельно или совместно в такт буксования ведущих колес тягового средства. Таким образом, при отклонениях больше допустимых колебаний значения действительной технологической скорости МТА, сигнализатор 2 информирует оператора появлением индикации "меньше" или "больше", а при наличии буксования больше допустимых значений, сигнализатор 2 технологической скорости движения МТА информирует оператора появлением индикации "буксование 10%" или "буксование 15%" каждого ведущего колеса тягового средства. В результате полученной световой и звуковой информации оператор (тракторист) должен манипулировать органами управления тягового средства так, чтобы на индикаторе сигнализатора 2 появилась индикация "норма", и при этом выдерживать технологическую скорость движения.
Использование изобретения позволяет повысить не только точность контроля технологической скорости движения, выдерживать ее значение при возделывании сельскохозяйственных культур, но также контролировать пройденный путь тяговым средством и учитывать износ ведущих колес тягового средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля технологической скорости машинно-тракторного агрегата | 1985 |
|
SU1355877A1 |
| Устройство для автоматического управления уровнем освещения в птичнике | 1991 |
|
SU1833839A1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2326494C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАГРУЗКИ ДВИГАТЕЛЯ | 1999 |
|
RU2159417C1 |
| Сигнализатор загрузки двигателя | 1988 |
|
SU1523925A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Преобразователь линейного позиционного кода в двоичный код | 1980 |
|
SU935944A1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2013 |
|
RU2560210C2 |
| СПОСОБ И УСТРОЙСТВО РАСПОЗНАВАНИЯ КЛАССОВ СИГНАЛОВ | 1998 |
|
RU2133501C1 |
| Сигнализатор загрузки двигателя | 1989 |
|
SU1615587A1 |
Изобретение относится к контрольно-измерительной технике, предназначено для информационного контроля технологической скорости движения и может быть использовано при эксплуатации колесных и гусеничных тяговых средств, работающих в реальном масштабе времени. Сигнализатор технологической скорости машинно-тракторных агрегатов содержит датчик скорости 1, подключенный к сигнализатору 2. Датчик скорости имеет два преобразователя вращения 3, 4, генератор элемента времени 5, коммутационные элементы 6, два блока выбора технологического режима работы 7, 8, анализатор отклонения параметра 9, сигнализатор буксования ведущих колес 10, 11, два счетных устройства 12, 13, элемент 2И 14, три импульсных счетчика 15, 16, 17. Анализатор отклонения параметра 9 совместно с другими блоками оценивают величины допустимых отклонений скорости как при движении без буксования, так и при движении с буксованием. Результаты контроля скорости выводятся на световой и звуковой индикаторы. Устройство обеспечивает точность контроля скорости движения и позволяет поддерживать установленное значение при возделывании сельскохозяйственных культур. 1 з.п. ф-лы, 1 ил.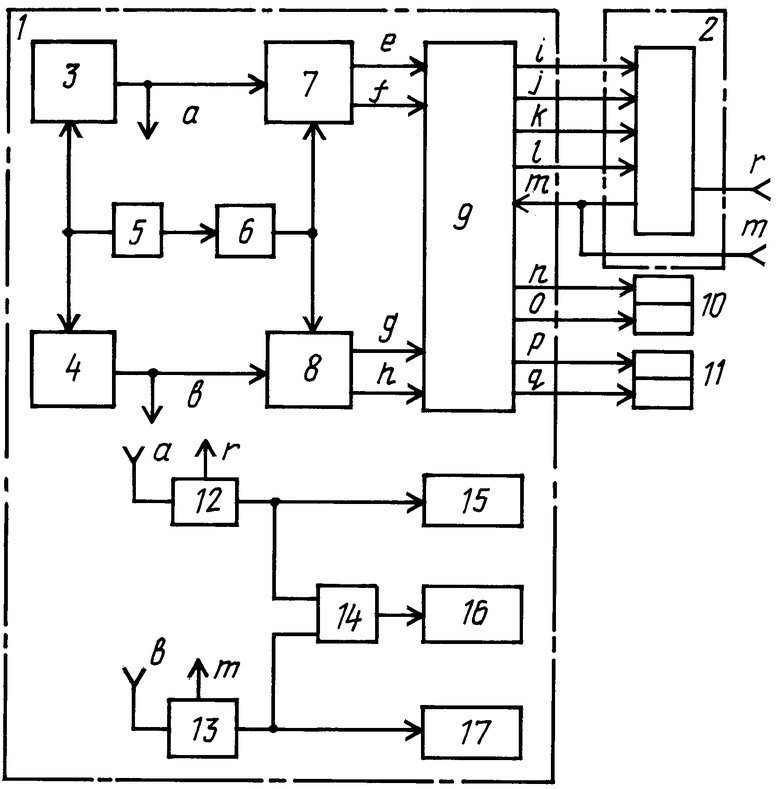
Vi=A·Fi(м·Гц=м/с),
где i - порядковый номер технологического режима, о.е.;
А=(1-Pi) L/K - параметрический коэффициент, м;
Fi - частота импульсов преобразователя вращения, Гц;
Рi - вероятность буксования колес, о.е.;
L - длина окружности колеса, м;
К - коэффициент передачи, о.е.
| Устройство контроля технологической скорости машинно-тракторного агрегата | 1985 |
|
SU1355877A1 |
| Спидометр | 1985 |
|
SU1280548A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО АВТОМОБИЛЕМ | 1993 |
|
RU2037779C1 |
| МОДУЛЬНЫЙ АППЛИКАТОР ДЛЯ БРАХИТЕРАПИИ | 2020 |
|
RU2813078C2 |

