Изобретение относится к сельскому хозяйству, в частности к способам контроля поперечных отклонений от направления движения пропашных агрегатов.
Целью изобретения является повышение информативности контроля.
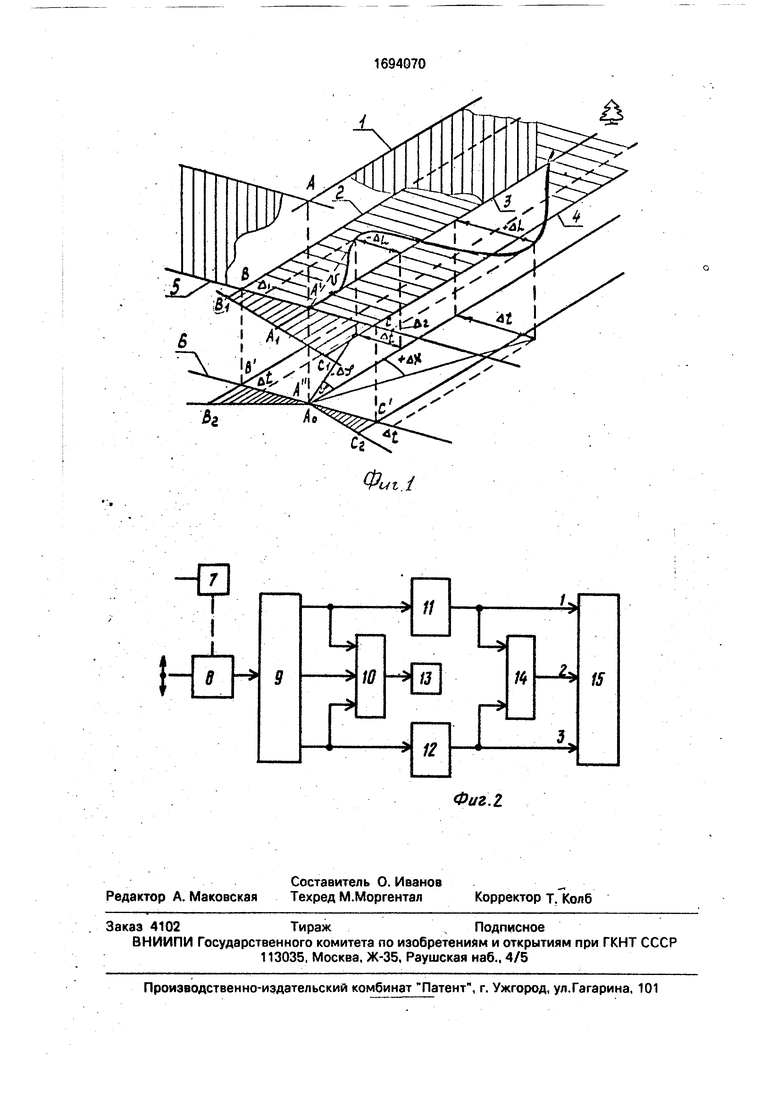
На фиг.1 изображена графическая схема реализации способа (точка А1 - изображение материального объекта; точка А - проекция точки А1 на линию 1 прицеливания, точки BiB2AiAo, Ci, Ca - ординаты числовых значений отклонения A L и A t,v - направление движения); на фиг.2 - структурная схема устройства, реализующего способ.
Сущность способа состоит в том, что мобильный сельскохозяйственный агрегат - материальный объект (точка А ) - устанавливают в направлении линии 1 прицеливания
по независимой базовой линии 3, определяют смещение линии 1 относительно контрольных линий 2,4 и используют две числовые оси 5, 6, расположенные перпендикулярно линии 1 прицеливания, и в точках их пересечения А , А задают числовое значение AI, АО, относительно которого фиксируют граничные точки В, В , С, С числовых значений контрольных линий 2, 4. На одной оси (5) фиксируют числовые значения поперечного отклонения A L, а на другой оси (6) - числовые значения At времени этого отклонения, пропорционального скорости движения.
Числовая ось 5 поперечных отклонений и числовая ось 6 времени этого отклонения представляют собой графическое изображение знаков числа изменения частоты генератора по линейному закону от минимального до максимального значения
о ю N о
VI О
Числовые значения линейного отклонения A L выбираются пропорциональными числовому значению частоты генератора, датчика.
Числовые значения At времени попе- речного отклонения определяются для определенной скорости движения в данном направлении из выражения At Т х sin p, где р- угол между первоначальным и действительным направлениями скорости дви- жения, Т- элемент времени, равный одной секунде. Мобильный сельскохозяйственный агрегат (точка А ) устанавливают в направлении движения по независимой базовой линии 3, направленной по линии 1 прицеливания на объект, находящийся на значительном удалении от точки А и расположенный в направлении рядков растений, фиксируют числовое значение точки А на числовой оси 5 поперечных отклонений.
На фиг.1 сельхозагрегат (точка А ) движется в направлении линии 1 прицеливания по независимой базовой линии 3 с текущей скоростью v, вектор которой изображен отрезком A v, указывающим в общем случае направление движения по прямой независимой базовой линии 3, а линейное отклонение A L изображено вектором -A L, + A L в 1-й момент времени, при котором произошло поперечное отклонение + A L При этом угловое рассогласование ± Доданных величин, т.е. вектора текущей скорости v и вектора скорости поперечного отклонения Avn, образует прямоугольный треугольник скоростей, гипотенузой которого является вектор текущей скорости движения сельхо- загрегата.
Заменяя в указанном прямоугольном треугольнике скоростей вектор текущей скорости v L/Tего временным интервалом Т L/v и вектор скорости поперечного отклонения Avn AL/At его временным интервалом At A L /A vn при том же угле рассогласования ± р, переходим к времен ному прямоугольнику процесса поперечно го отклонения от базовой линии посредством введения оценки временного интервала.
Из треугольника скоростей имеем sin if Avn/v, из треугольника временного про-
цесса имеем sin р . Величина slny
одинакова. Следовательно, A vn/v A t/T, откуда At Т A vn/v,- так как A vn A L/At, то At T/AtAL/vHflnAt2 TAL/v
Таким образом, оценка временного интервала процесса поперечного отклонения определяется выражением 2 Т A L/v, где Т - отведенное время для проведения дейл.
5 1015 20
253035
40
50
55
45
ствий по оценке временного измерения. Например, это время выбрано равным одной секунде(Т 1с), и за это время производится подсчет импульсов, частота которых изменяется по линейному закону. Для повышения точности и быстродействия в зависимости от величины текущей скорости объекта отведенное время Т выбирается, например, из ряда: 10,0; 1,0:0,1; 0,01 и т.д., представляющего элементы временных ме- ток;Д L- величина линейного отклонения от направления движения, пропорциональная числу импульсов, частота которых изменяется по линейному закону; v - величина измеренной текущей скорости материального объекта, на которой производится работа, например работа по возделыванию сельскохозяйственных культур на полях.
Таким образом, оценка временного интервала позволяет судить о превышении допустимого временного поперечного отклонения.
Затем задают числовые значения точек В и С на числовой оси 5, которые определяют направление контрольных линий 2 и 3, параллельно которым на другой числовой оси 6 задают числовые значения точек В и С , которые также определяют направление проекций контрольных линий 2 и 3, и относительно точки АО определяют числовое значение At времени этого отклонения Ва и С2, пропорционального скорости движения.
При движении агрегата (точки А1) с определенной скоростью в направлении независимой базовой линии 3 траектория движения агрегата под действием внешних факторов отклоняется в ту (+AL) или иную (-AL) сторону. Эти отклонения определяются текущими значениями А1 и А 2 на числовой оси 5 поперечных отклонений, т.е. на оси 5 фиксируются, текущие числовые значения Д1 и А2.
Если числовые значения А 1 меньше В/ А 1 и At не достигло значений В и С , т.е. At В и At С , то судят о допусковом, оптимальном, значении отклонения от направления движения при определенной скорости движения агрегата.
Если числовые значения Д1 больше В/А 1 или Д2 больше С/А2 и At превышает значения В и С , т.е. At В и At С , то судят о нарушении оптимального режима и о его отклонении в ту или иную сторону. При этом оператор (тракторист) должен воздействовать на органы управления движением агрегата так, чтобы текущие значения А1 и А2 не выходили за граничные точки В и С, а текущее числовое значение At не превышало значений точек В и С оптимального
режима поперечных отклонений при определенной скорости движения.
Устройство содержит прицельное устройство 7, датчик 8, блок 9 регистрации числа, блок 10 сравнения, два блока 11, 12 элемента времени, одновходовый индикатор 13, элемент 2И 14, трехвходовый индикатор 15, к второму входу которого подключен элемент 2 И 14, входы которого соединены с выходом каждого блока 11. 12 элемента времени, подключенным к другим входам трехвходового индикатора 15, а входы которых (11, 12) соединены с первым и третьим входами блока 10 сравнения, включенного в цепи одновходового индикатора 13, и входами блока 9 регистрации числа, второй выход которого соединен с другим входом блока 10 сравнения; вход блока 9 регистрации числа соединен с датчиком 8, связанным с рулевым управлением агрегата, оборудованного прицельным устройством 7.
Устройство работает следующим образом.
В процессе установления агрегата в выбранном направлении по линии 1 прицельного устройства 7 датчик 8 вырабатывает частотный сигнал, текущее числовое значение которого распознается блоком 9 регистрации числа, например AI 55. При этом, если агрегат установлен в выбранном направлении движения, то на каждом выходе блока 9 регистрации числа появляется сигнал, например I, который действует на выходах блока 10 сравнения, выходной сигнал которого включает индикатор 13 Установка О.
При движении агрегата в установленном направлении под действием внешних факторов происходят поперечные отклонения от направления движения +AL или -Д L, величина которых превышает значения допустимого отклонения Bi, Ci. При этом датчик 8 вырабатывает пропорционально направлению отклонения (+Д Ц -Д L) частоту, значение которой находится выше или
ниже относительно значения частоты, ранее выработанной датчиком 8 (при установке агрегата в направлении движения, значения точек BI, Ci). При этом блок 9 регистрации
числа фиксирует граничные значения частот и отметки сигнала на его выходе о превышении (уменьшении) частоты датчика 8, включает блок 11 или 12, т.е. один из блоков элемента времени, по истечении которого
на одном из крайних входов трехвходового индикатора 15 появляется сигнал, включающий индикацию Отклонение влево или Отклонение вправо, при этом индикация допустимого отклонения по его второму входу выключается, так как на одном из входов элемента 2И 14 появляется сигнал О. При этом блок 10 сравнения выключает индикатор 13 Установка О.
Формула изобретения
Способ контроля поперечного отклонения
движения мобильного сел ьхозагрегата от базовой линии, включающий задание величин, соот- „ветствующих положениям базовой линии и контрольных допусковых линий, формирование последовательности импульсов, частота которой соответствует линейному отклонению направления движения мобильного сел ьхозагрегата от базовой линии, и сигнала оповещения о превышении допустимого
отклонения, отличающийся тем, что, с целью повышения информативности контроля, измеряют текущую скорость мобильного сел ьхозагрегата, определяют величину временного интервала, вторая степень которого равна отношению величины линейногоотклонениямобильногосельхозагрегата от базовой линии к величине скорости сельхозагрегата, задают граничные значения этого интервала и при
одновременном превышении величины временного интервала и величины отклонения мобильного сельхозагрегата от базовой линии соответствующих граничных значений судят о превышении контрольных допусковых линий и вырабатывают сигнал оповещения.
&г
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭКВИДИСТАНТНЫМ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО И ЛИНЕЙНО-БОКОВОГО ОТКЛОНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТ ОПОРНОЙ ТРАЕКТОРИИ | 1992 |
|
RU2032926C1 |
| СПОСОБ АВТОВОЖДЕНИЯ СЕЛЬХОЗАГРЕГАТА | 1991 |
|
RU2025924C1 |
| Устройство контроля поперечных отклонений универсально-пропашных агрегатов | 1988 |
|
SU1618303A1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2487823C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| Способ измерения скорости мобильного сельскохозяйственного агрегата | 1990 |
|
SU1782375A1 |
| СПОСОБ ПОДГОТОВКИ КОНТРОЛЬНОЙ ПЛОЩАДКИ ДЛЯ СОГЛАСОВАНИЯ АГРЕГАТОВ УПРАВЛЕНИЯ СТРЕЛЬБОЙ ИЗ АРТУСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572178C1 |
Изобретение относится к сельскому хозяйству, в частности к способам контроля поперечных отклонений от направления движения пропашных агрегатов. Целью изобретения является повышение информативности контроля. В процессе реализации способа мобильный сельхозагрегат устанавливают в направлении линии прицеливания и фиксируют величину отклонения этого сельхозагрегата от этой линии. Так же регистрируют текущую скорость сельхозагрегата. При превышении контрольных значений одновременно величинами отклонения и временного интервала, равного квадратному корню отношения этого отклонения к скорости сельхозагрегата, вырабатывают сигнал оповещения 2 ил.
Н
0U/
| Устройство контроля поперечных отклонений универсально-пропашных агрегатов | 1988 |
|
SU1618303A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
