Изобретение относится к ручному механизированному инструменту и может быть использовано в различных отраслях промышленности для затяжки резьбовых соединений с тарированным крутящим моментом.
Цель изобретения - повышение надежности за счет введения в конструкцию гайковерта механизма включения муфты предельного -момента.
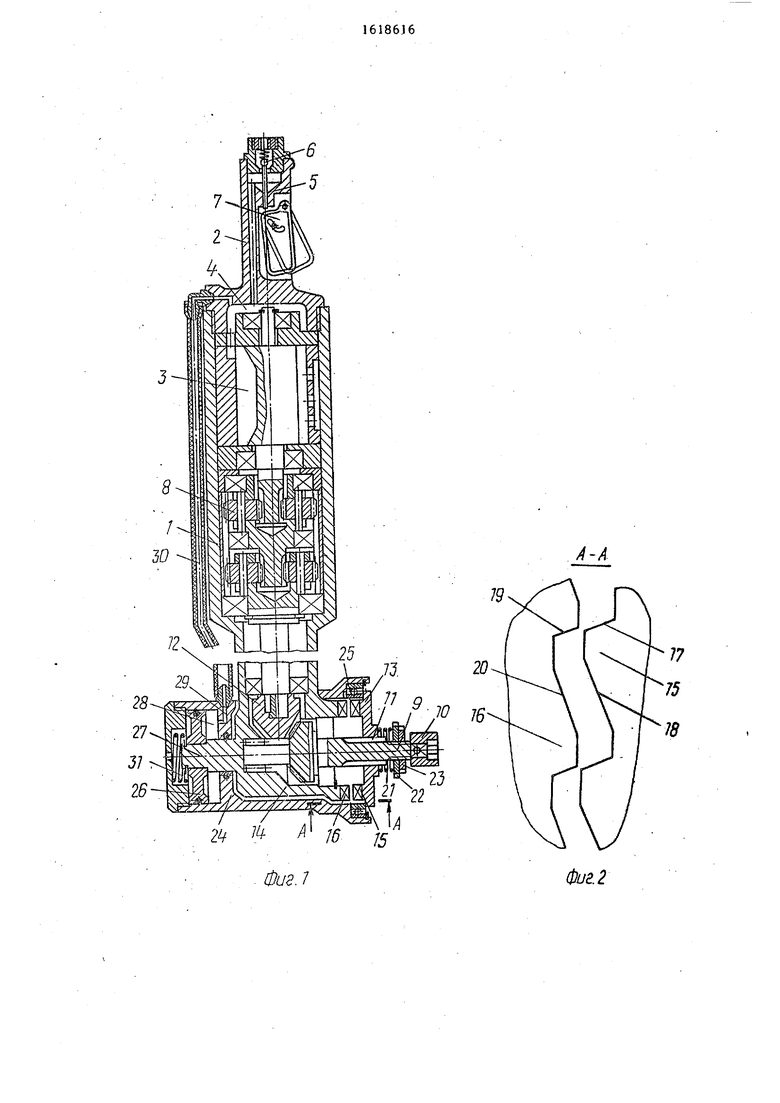
На фиг. изображен пневматический угловой гайковерт, продольный разрез- ;
31
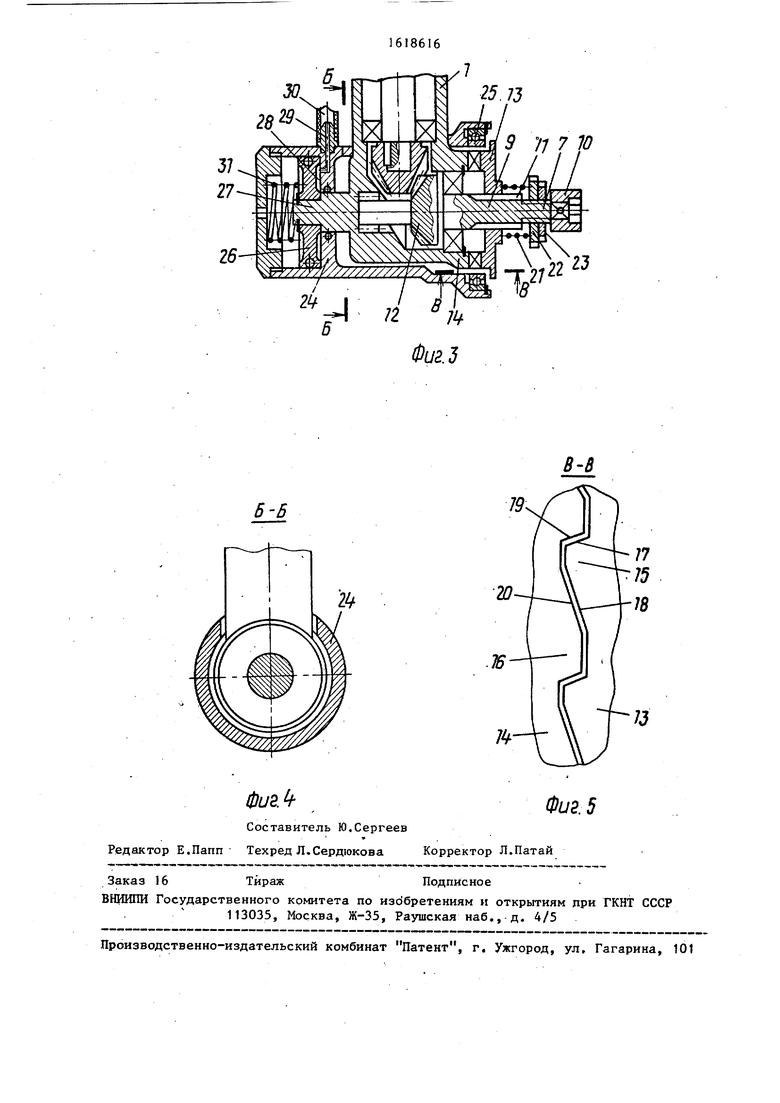
на фиг.2 - разрез А-А на фиг.1; на фиг.З - головка пневматического угло вого гайковерта в положении ручной дозатяжки резьбового соединения, продольный разрез; на фиг.4 - разрез Б-Б на фиг.З; на фиг.5 - разрез В-В на фиг.З.
Пневматический угловой гайковерт содержит корпус 1 с рукояткой 2, размещенные в нем пневмопривод 3 с механизмом пуска, включающим возду- хоподводящий канал 4, толкатель 5, клапан 6 и курок 7, связанный с пнев моприводом 3 двухступенчатый пла- нетарный редуктор 8, шпиндель 9, имеющий на конце сменную рабочую головку 10, а на наружной поверхности шлицы 11, коническую зубчатую передачу 12, связывающую шпиндель 9 .с двух ступенчатым планетарным редуктором 8, муфту предельного момента, включающую ведомую полумуфту 13, установленную на птицах 11 шпинделя 9 с возможностью осевого перемещения, и ведущую полумуфту 14, закрепленную на корпусе 1, механизм настройки муфты предельного момента и механизм включения муфты предельного момента.
Ведомая 13 и ведущая 14 полумуфты выполнены с трапецеидальными несимметричными торцовыми зубьями. 15 и 16 соответственно, которые имеют рабочие поверхности 17-20. Ведомая полумуфта 13 поджата пружиной 21 к
.ведущей полумуфте 14 Усилие пружины 21 регулируется при помощи шайбы 22 и гайки 23, взаимодействующей со шпинделем 9, которые совместно образуют механизм настройки муфты предельного момента. Механизм включения муфты предельного момента выполнен в виде охватывающего муфту предельного момента и установленного с возможностью осевого перемещения пневмоцилиндра 24, в котором с возможностью вращения на подшипнике 25 и совместного с ним перемещения установлена ведущая полумуфта 13 и поршень. 26 со щтоком 27, закрепленным на корпусе 1 и образующим с пневмо- цилиндром 24 штоковую рабочую камеру 28, сообщающуюся через канал 29, вы- полненный в пневмоцилиндре 24, и трубопровод 30 с воздухоподводящим каналом 4, а пневмоцилиндр 24. подпру. жинен пружиной 3J .относительно поршт ня 26. :
0 r n 5
с
5
0
16 . 4
Гайковерт работает следующим образом.
Рабочую головку 10 устанавливают,/ на элемент резьбового соединения (не показано), например на гайку, и нажимают на курок 7 механизма пуска Ьневмопривода 3, Сжатый воздух поступает в пневмопривод 3 и штоковую рабочую камеру 28 пневмоцилиндра 24. При этом пневмоцилиндр 24,. сжимая пружину 31, перемещается относительно неподвижного поршня , и, воздействуя внутренним кольцом подшипника 25 на ведомую полумуфту 13, выводит ее .из зацепления с ведущей полумуфтой 14, а вращение с пневмопривода 3 через двухступенчатый планетарный редуктор 8 и коническую зубчатую передачу 1.2 передается на шпиндель 9 с рабочей головкой 10. Производится скоростное навинчивание и затяжка гайки резьбового соединения.
I , - ,При этом ведомая полумуфт,.ч 13 совместно с шпинделем 9 и внутренним кольцом подшипника 25 свободно вращается относительно ведущей полумуфты 14, корпуса 1 и пневмоцилиндра 24. Затяж-.. ка гайки продолжается до тех пор, пока момент на шпинделе 9 не превысит момент, развиваемый пневмоприводом 3, после чего последний останавливается. После этого курок 7 механизма пуска пневмопривода 3 отпускают, сжатый воздух из штоковой рабочей камеры .28 через канал 29 и трубопровод 30 поступает в рабочую камеру пневмопри- .вода 3, и через его выхлопные каналы (не показаны) стравливается в атмосферу, пневмоцилиндр 24 под действием пружины 31 перемещается в исходное положение, а ведомая полумуфта 13, перемещаясь по шлицам 11, под действием пружины 21 входит в зацепление с ведущей полумуфтой 14. Затем гайковерт за рукоятку 2 поворачивают по часовой стрелке на некоторый угол. При этом поворачивается и связанная с корпусом 1 ведущая полумуфта 14, которая посредством взаимодействия рабочих поверхностей 19 зубьев 16 с рабочими поверхностями 17 зубьев 15 ведомой полумуфты 13 производит ее поворот и передачу момента через шлицы 11 шпинделя 9 на рабочую голову ку 10. Производится дотяжка гайки резьбового соединения на определенный крутящий момент.
При повороте рукоятки 2 против часовой стрелки ведущая полумуфта 14 скошенными поверхностями 20 проскальзывает по зубьям 15 ведомой полумуфты J.3 и совершается холостой ход муфты предельного момента. При дальнейшем вращении рукоятки 2 по часовой стрелке, как только крутящий момент на шпинделе 9 достигнет предельной величины, ведомая полумуфта 13, преодолевая усилие пружины 21, перемещается в осевом направлении и выходит из зацепления с ведущей полумуфтой 14. Произойдет срабатыва- .нйе муфты предельного момента. Затяжку заканчивают, гайковерт переставляют на гайку следующего резьбового соединения. Далее цикл повторяется в описанной выше последовательности.
Формула изобретения Пневматический угловой гайковерт, содержащий корпус с рукояткой, размещенные в нем пневмопривод с меха1618616
низмом пуска, включающим Боздухопод- водящий канал, клапан и курок, шпиндель со сменной рабочей головкой, муфту предельного момента, ведущая полумуфта которой закреплена на корпусе, а ведомая установлена с возможностью осевого перемещения на шпинделе, и механизм настройки муфты
предельного момента, отличаю-- щ и и с я тем, что, с. целью повышения надежности, он снабжен механизмом включения муфты предельного момента, выполненным в виде охваты5 вающего муфту предельного момента и установленного с возможностью перемещения пневмоцилиндра с каналом, ведомая полумуфта установлена в последнем с возможностью вращения и
совместного осевого перемещения, . шток поршня пневмоцилиндра закреплен на корпусе с образованием совместно с поршнем и пневмоцилиндром штоковой рабочей камеры для сообщения через
5 канал пневмоцилиндра с воздухопод- водящим каналом.
J
3J
р
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический угловой гайковерт | 1989 |
|
SU1676789A1 |
| Многошпиндельный гайковерт | 1989 |
|
SU1634477A1 |
| Гайковерт | 1990 |
|
SU1775287A1 |
| Пневматический гайковерт | 1990 |
|
SU1782717A1 |
| Пневматический угловой гайковерт | 1988 |
|
SU1523327A1 |
| Гайковерт | 1987 |
|
SU1452671A1 |
| Гайковерт | 1988 |
|
SU1574447A1 |
| Пневматический гайковерт | 1981 |
|
SU982889A1 |
| Гайковерт | 1981 |
|
SU1004088A1 |
| ГАЙКОВЕРТ | 1991 |
|
RU2025268C1 |
Изобретение относится к ручному .механизированному инструменту для i тарированной затяжки резьбовых сое- ;динений. Цель изобретения - повышение надежности. Пневматический угловой гайковерт рабочей головкой устанавливают на головку болта атя- гиваемого резьбового соединения, и нажимают на курок механизма пуска пневмопривода. Сжатый воздух через воздухоподводящий канал поступает в пневмопривод и через трубопровод и нанал - в штоковую рабочую камеру, При этом пневмоцилиндр под давлением сжатого воздуха, сжимая пружину, перемещается в осевом направлении и выводит ведомую полумуфту из зацеп- i ления с ведущей полумуфтой. Одновременно вращение от пневмопризода через двухступенчатый планетарный редуктор и коническую зубчатую передачу передается на шпиндель с рабочей головкой, который осуществляет затяжку резьбового соединения до тех пор, пока хватает мощности пневмопривода, после чего последний останавливается. Отпускают курок механизма пуска пневмопривода.и отсекают последний от воздухоподводящей магистрали. В это время воздух из што- ковой рабочей камеры выходит в атмосферу и пневмоцилиндр под действием пружины возвращается в исходное положение. Ведомая полумуфта входит в зацепление с ведущей полумуфтой. Затем за рукоятку производят поворот корпуса по часовой стрелке и продолжают затяжку резьбового соединения. Как только будет достигнут предельный момент затяжки, зубья ведомой полумуфты наклонными поверхностями перемещаются относительно ответных зубьев ведущей полумуфты до их взаимного проскаль- з ыв ания. 5 ил. i О & 00 о S5
D
O CO
vO
CQ o
NJ CM
5 CXJ
26
5-В
19
ТВ
ъ
13
