(Л С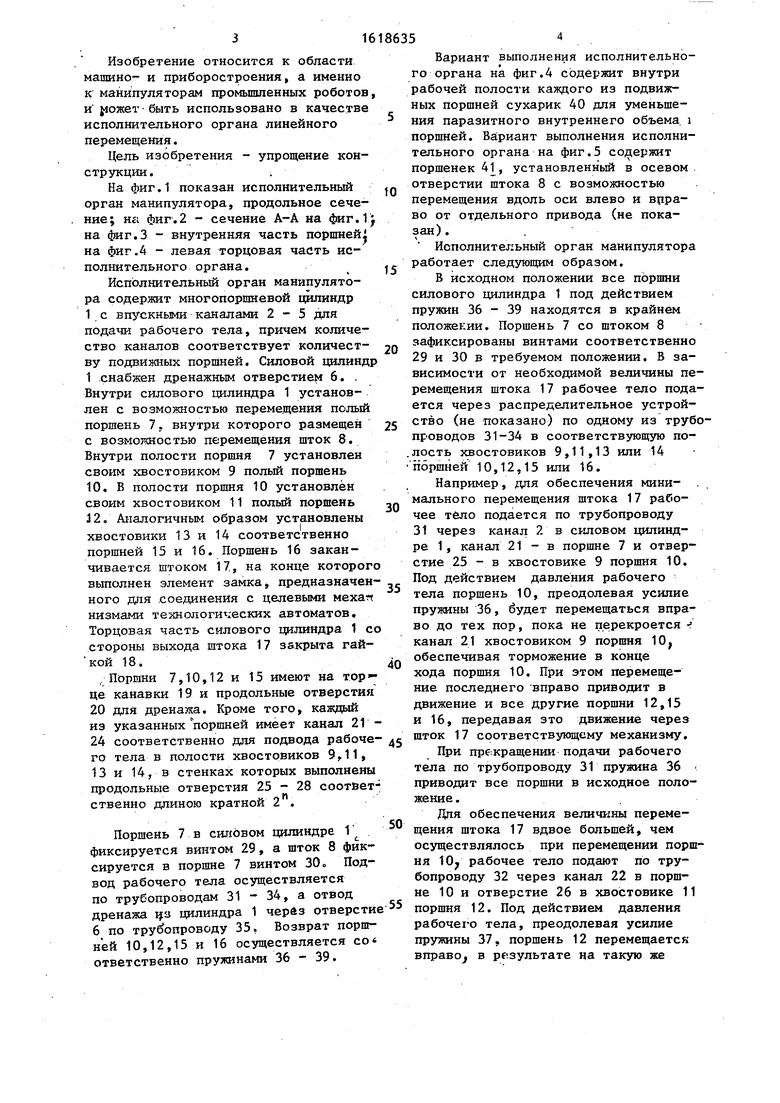
| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой цилиндр | 1986 |
|
SU1498988A1 |
| СЪЕМНИК ПЯТНИКА ВАГОНА | 2009 |
|
RU2405691C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕПЛОВОЗОМ | 1970 |
|
SU269654A1 |
| Устройство для изменения степени сжатия поршневого двигателя внутреннего сгорания | 1991 |
|
SU1782291A3 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 1991 |
|
RU2023898C1 |
| Манипулятор | 1979 |
|
SU837857A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ГИДРАВЛИЧЕСКОГО, НАПРИМЕР, ВУЛКАНИЗАЦИОННОГО ПРЕССА | 1941 |
|
SU64811A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU861060A1 |
| Устройство для запрессовки труб | 1980 |
|
SU1022799A1 |
| Гидромеханический импульсный агрегат | 1987 |
|
SU1666691A1 |
Изобретение относится к машино- и приборостроению, а именно к манипулят,орам промышленных роботов, и может быть: использовано при автоматизации технологических процессов. Целью изобретения является упрощение/ конструкции. Исполнительный орган содержит многопоршневой силовой цилиндр 1. Выполнение хвостовиков поршней 10 и 12 в виде полых плунжеров с продольными отверстиями 25 и 26, установленных герметично в полостях предыдущих поршней 7 и 10, имеющих каналы для подвода рабочего тела, позволяет обеспечить торможение штока в конце хода каждого поршня за счет перекрытия каналов хвостовиками поршней. 4 ил. §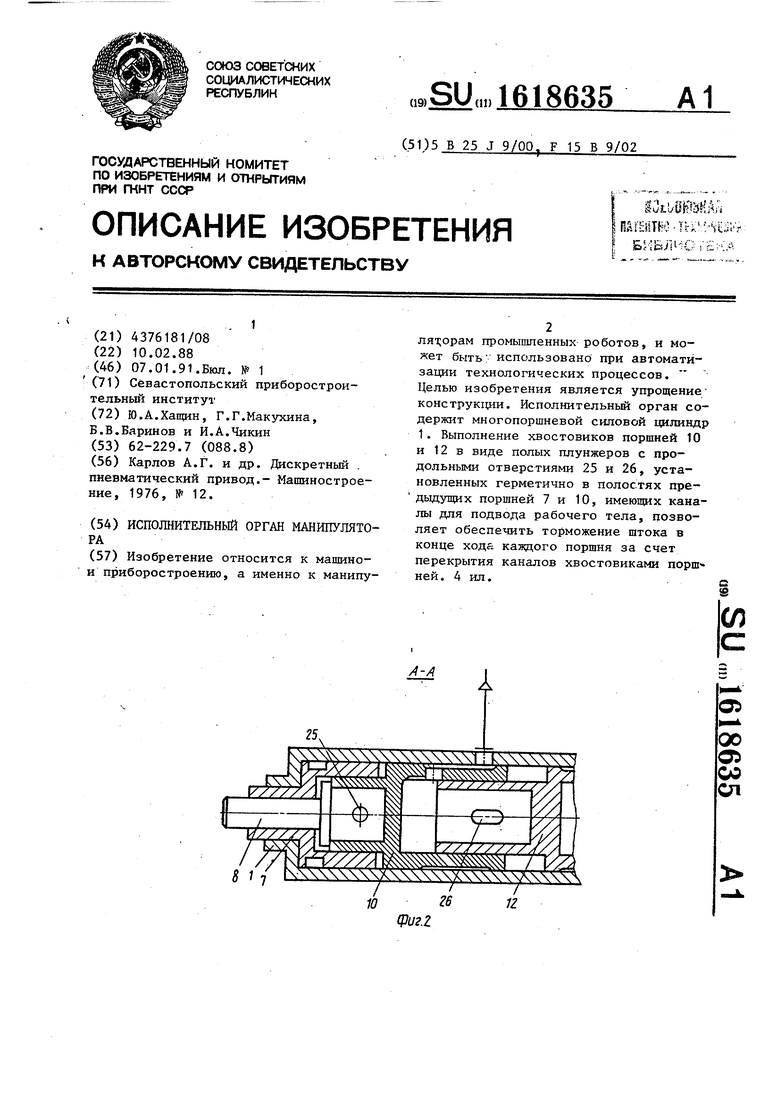
А-А
о
оо
с& со
ел
Изобретение относится к области машине- и приборостроения, а именно к манипуляторам промышленных роботов, и может быть использовано в качестве исполнительного органа линейного перемещения.
Цель изобретения - упрощение конструкции.
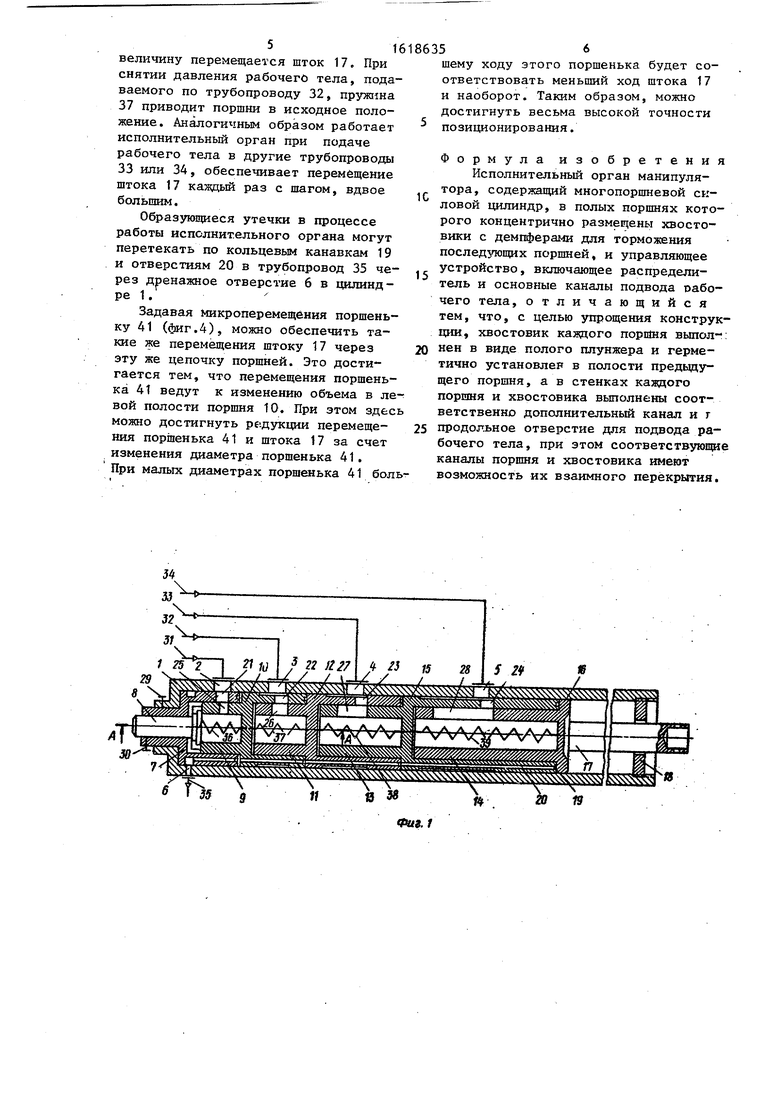
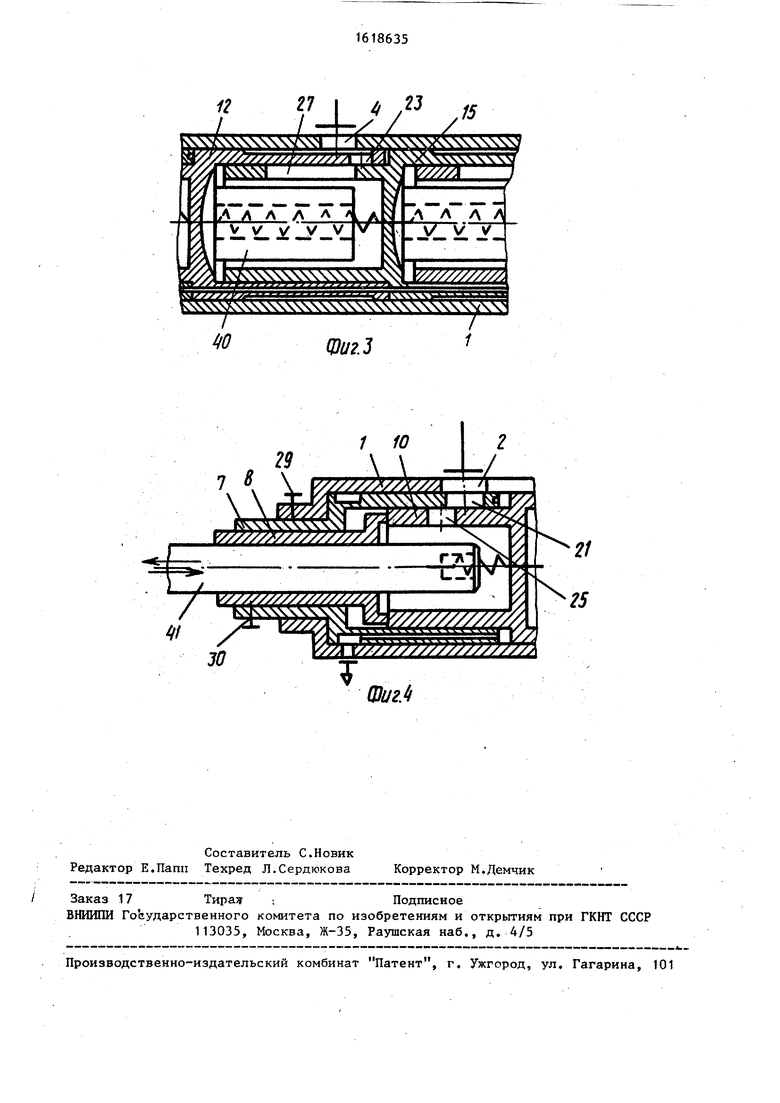
На фиг.1 показан исполнительный орган манипулятора, продольное сечение; на фиг.2 - сечение А-А на фиг.1) на фиг.З - внутренняя часть поршней на фиг.4 - левая торцовая часть исполнительного органа.
Исполнительный орган манипулятора содержит многопоршневой цилиндр 1 с впускными каналами 2-5 для подачи рабочего тела, причем количество каналов соответствует количеству подвижных поршней. Силовой цилиндр 1 снабжен дренажным отверстием 6. . Внутри силового цилиндра 1 установлен с возможностью перемещения полый поршень 7. внутри которого размещен с возможностью перемещения шток 8. Внутри полости поршня 7 установлен своим хвостовиком 9 полый поршень 10, В полости поршня 10 установлен своим хвостовиком 11 полый поршень 12, Аналогичным образом установлены хвостовики 13 и 14 соответственно поршней 15 и 16. Поршень 16 заканчивается штоком 17, на конце которого выполнен элемент замка, предназначенного для соединения с целевыми меха низмами технологических автоматов. Торцовая часть силового цилиндра 1 со стороны выхода штока 17 закрыта гай- кой 18.
..Поршни 7,10,12 и 15 имеют на торце канавки 19 и продольные отверстия 20 для дренажа. Кроме того, каждый
10
15
Вариант выполнения исполнительно го органа на фиг.4 содержит внутри рабочей полости каждого из подвижных поршней сухарик 40 для уменьшения паразитного внутреннего объема, поршней. Вариант выполнения исполни тельного органа на фиг.5 содержит поршенек 41 , установленный в осевом отверстии штока 8 с возможностью перемещения вдоль оси влево и врра- во от отдельного привода (не показан).
Исполнительный орган манипулятор работает следующим образом.
В исходном положении все поршни силового цилиндра 1 под действием пружин 36 - 39 находятся в крайнем положении. Поршень 7 со штоком 8 зафиксированы винтами соответственн 29 и 30 в требуемом положении. В за висимости от необходимой величины п ремещения штока 17 рабочее тело под ется через распределительное устрой ство (не показано) по одному из тру проводов 31-34 в соответствующую по .лость хвостовиков 9,11,13 или 14 поршней 10,12,15 или 16.
Например, для обеспечения минимального перемещения штока 17 рабочее тело подается по трубопроводу 31 через канал 2 в силовом цилиндре 1, канал 21 - в поршне 7 и отвер стие 25 - в хвостовике 9 поршня 10. Под действием давления рабочего тела поршень 10, преодолевая усилие пружины 36, будет перемещаться впра во до тех пор, пока не перекроется канал 21 хвостовиком 9 поршня 10, обеспечивая торможение в конце хода поршня 10. При этом перемещение последнего вправо приводит в движение и все другие поршни 12,15 и 16, передавая это движение через
20
25
30
35
40
из указанных поршней имеет канал 21 24 соответственно для подвода рабоче- 45 шток 17 соответствующему механизму.
го тела в полости хвостовиков 9,11, . ПРИ прекращении подачи рабочего
тела по трубопроводу 31 пружина 36 приводит все поршни в исходное поло жение.
13 и 14, в стенках которых выполнены продольные отверстия 25 - 28 соответственно длиною кратной 2 .
Поршень 7 в силовом цилиндре 1 t . фиксируется винтом 29, а шток 8 фиксируется в поршне 7 винтом 30 Подвод рабочего тела осуществляется по трубопроводам 31 - 34, а отвод дренажа из цилиндра 1 черАз отверстие 6 по трубопроводу 35. Возврат поршней 10,12,15 и 16 осуществляется со ответственно пружинами 36 - 39.
,
)
р о о
10
15
6186354
Вариант выполнения исполнительного органа на фиг.4 содержит внутри рабочей полости каждого из подвижных поршней сухарик 40 для уменьшения паразитного внутреннего объема, i поршней. Вариант выполнения исполнительного органа на фиг.5 содержит поршенек 41 , установленный в осевом . отверстии штока 8 с возможностью перемещения вдоль оси влево и врра- во от отдельного привода (не показан).
Исполнительный орган манипулятора работает следующим образом.
В исходном положении все поршни силового цилиндра 1 под действием пружин 36 - 39 находятся в крайнем положении. Поршень 7 со штоком 8 зафиксированы винтами соответственно 29 и 30 в требуемом положении. В зависимости от необходимой величины перемещения штока 17 рабочее тело подается через распределительное устройство (не показано) по одному из трубопроводов 31-34 в соответствующую по- .лость хвостовиков 9,11,13 или 14 поршней 10,12,15 или 16.
Например, для обеспечения минимального перемещения штока 17 рабочее тело подается по трубопроводу 31 через канал 2 в силовом цилиндре 1, канал 21 - в поршне 7 и отверстие 25 - в хвостовике 9 поршня 10. Под действием давления рабочего тела поршень 10, преодолевая усилие пружины 36, будет перемещаться вправо до тех пор, пока не перекроется канал 21 хвостовиком 9 поршня 10, обеспечивая торможение в конце хода поршня 10. При этом перемещение последнего вправо приводит в движение и все другие поршни 12,15 и 16, передавая это движение через
20
25
30
35
40
. ПРИ прекращении подачи рабочего
0
тела по трубопроводу 31 пружина 36 приводит все поршни в исходное положение.
Для обеспечения величины перемещения штока 17 вдвое большей, чем осуществлялось при перемещении поршня 10 рабочее тело подают по трубопроводу 32 через канал 22 в поршне 10 и отверстие 26 в хвостовике 11 5 поршня 12. Под действием давления рабочего тела, преодолевая усилие пружины 37. поршень 12 перемещается вправо в результате на такую же
величину перемещается шток 17. При снятии давления рабочего тела, подаваемого по трубопроводу 32, пружина 37 приводит поршни в исходное положение. Аналогичным образом работает исполнительный орган при подаче рабочего тела в другие трубопроводы 33 или 34, обеспечивает перемещение штока 17 каждый раз с шагом, вдвое большим.
Образующиеся утечки в процессе работы исполнительного органа могут перетекать по кольцевым канавкам 19 и отверстиям 20 в трубопровод 35 через дренажное отверстие 6 в цилиндре 1 .
Задавая микроперемещения поршеньку 41 (фиг.4), можно обеспечить такие же перемещения штоку 17 через эту же цепочку поршней. Это достигается тем, что перемещения поршенька 4 t ведут к изменению объема в ле вой полости поршня 10. При этом здес можно достигнуть редукции перемещения поршенька 41 и штока 17 за счет изменения диаметра поршенька 41. При малых диаметрах поршенька 41 бол
-ь ь1С
шему ходу этого поршенька будет соответствовать меньший ход штока 17 и наоборот. Таким образом, можно достигнуть весьма высокой точности позиционирования.
Формула изобретения
Исполнительный орган манипулятора, содержащий многопоршневой силовой цилиндр, в полых поршнях которого концентрично размещены хвостовики с демпферами для торможения последующих поршней, и управляющее устройство, включающее распределитель и основные каналы подвода рабочего тела, отличающийся тем, что, с целью упрощения конструкции, хвостовик каждого поршня выпол-: нен в виде полого плунжера и герметично установлеР в полости предыдущего поршня, а в стенках каждого поршня и хвостовика выполнены соответственно дополнительный канал и г 25 продольное отверстие для подвода рабочего тела, при этом соответствующие каналы поршня и хвостовика имеют возможность их взаимного перекрытия.
15
20
19
12
х..
S333S3SSSOSS3XZi33SUSXSCa SSsSSSSSSSSSSSSl SSf
Т
w
ФигЗ
Щ
Шиг4
| Карлов А.Г | |||
| и др | |||
| Дискретный | |||
| пневматический привод.- Машиностроение, 1976, № 12. |
