(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1976 |
|
SU538957A1 |
| Манипулятор к прессу | 1986 |
|
SU1339011A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Манипулятор | 1980 |
|
SU908588A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Манипулятор | 1987 |
|
SU1657369A1 |
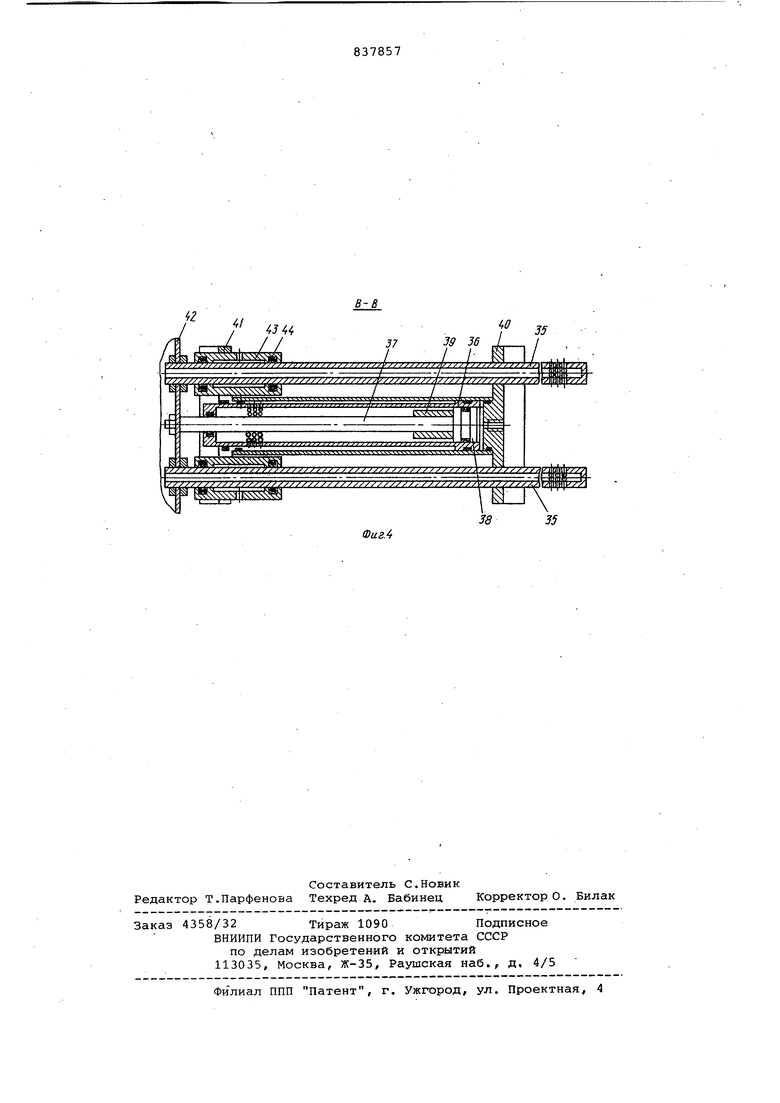
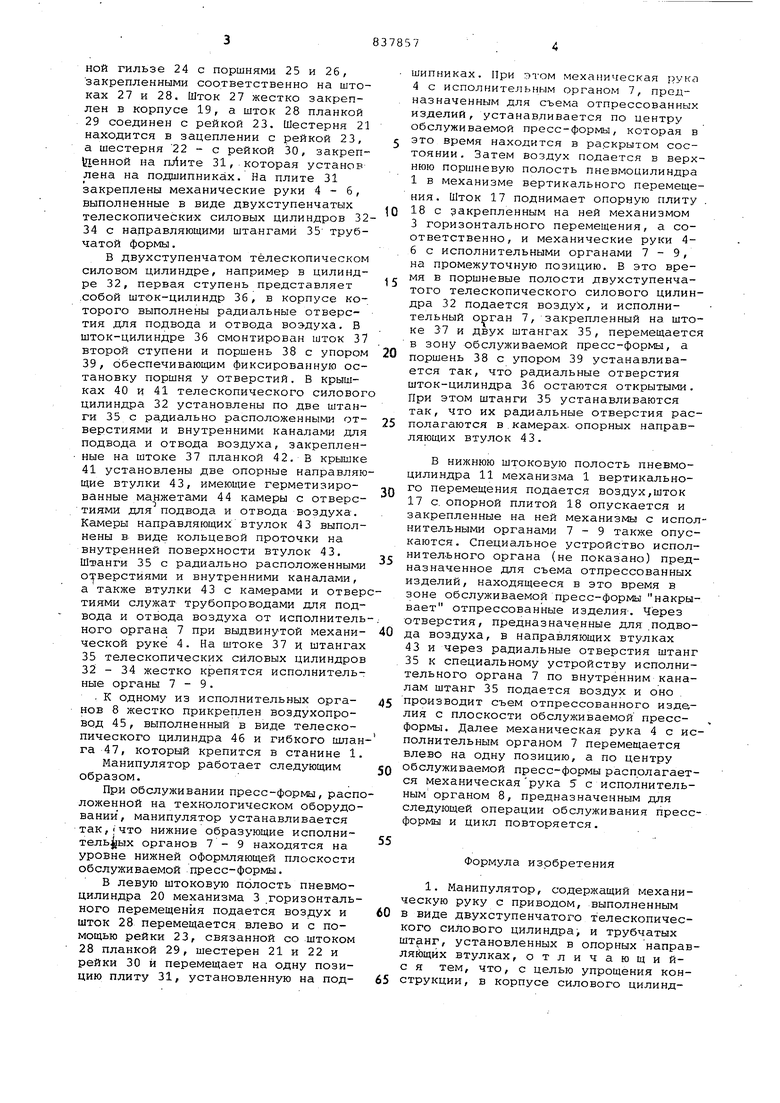
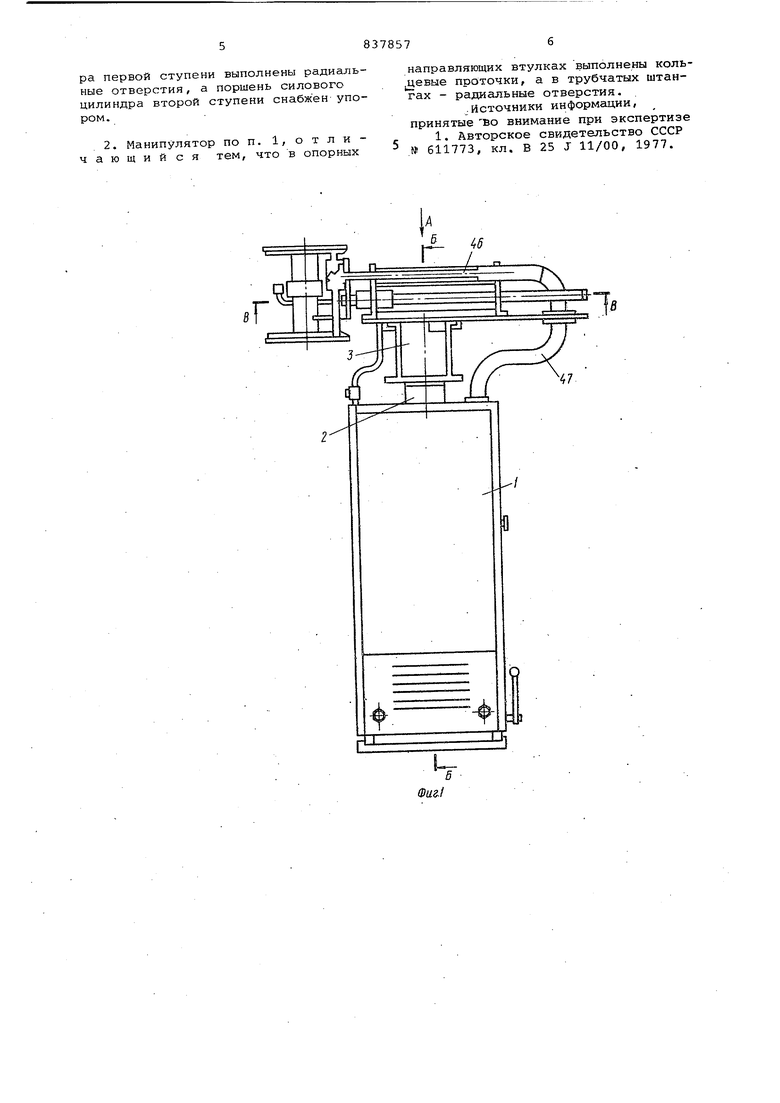
Изобретение относится к промышлен ным манипуляторам, предназначенным для обслуживания технологического . оборудования, в частности к средствам автоматизации процессов прессова ния изделий из пластмасс. Известен манипулятор, содержащий механическую руку с приводом, выполненным -в виде двухступенчатого теле.скопического силового цилиндра, и трубчатых штанг, установленньзх в опо рных направляющих втулках Недостатком известного манипулято ра является сложность конструкции привода механических рук. Цель изобретения - упрощение корструкции привода механических рук манипулятора. Указанная цель достигается тем, что в корпусе силового цилиндра первой ступени выполнены радиальные отверстия, а поршень силового цилиндра второй ступени снабжен упором, причем в опорных направляющих втулках выполнены кольцевые проточки, а в трубчатых штангах - радиальные отвер тия. На фиг.1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1. Манипулятор состоит из станины 1 с блоком управления, механизма транспортирования с позиционированием, состоящего из механизма 2 вертикального перемещения и механизма 3 горизонтального перемещения механических рук 4 - 6 с исполнительными органами 7 - 9. Механизм 2 вертикального перемещения, установленный на плите 10 станины 1, включает в себя пневмоцилиндр 11 позиционного перемещения и направляющую опору 12. Пневмоцилиндр 11 позиционного перемещения состоит из двух цилиндров двухстороннего действия, расположенных .сбосно в одной гильзе 13, с поршнями 14 и 15 закрепленными соответственно на штоках 16 и17. Шток 16 жестко крепится на плите 10, а на штоке 17 закреплена опорная плита 18. На плите 18 закреплен (механизм 3 горизонтального перемещения, представляющий собой корпус 19, в котором размещены пневмоцилиндр 20 позиционного перемещения, шестерни 21 и 22 и рейка 23. Пневмоцилиндр 20 позиционного перемещения также состоит из двух цилиндров двухстороннего действия, расположенных соосно в одной гильзе 24 с поршнями 25 и 26, закрепленными соответственно на штоках 27 и 28. Шток 27 жестко закреплен в корпусе 19, а шток 28 планкой 29 соединен с рейкой 23. Шестерня 21 находится в зацеплении с рейкой 23, а шестерня 22 - с рейкой 30, закрепенной на пЛите 31,.которая установ ена на подшипниках. На плите 31 акреплены механические руки 4 - б, ыполненные в виде двухступенчатых телескопических силовых цилиндров 3234 с направляющими штангами 35 трубатой формы.
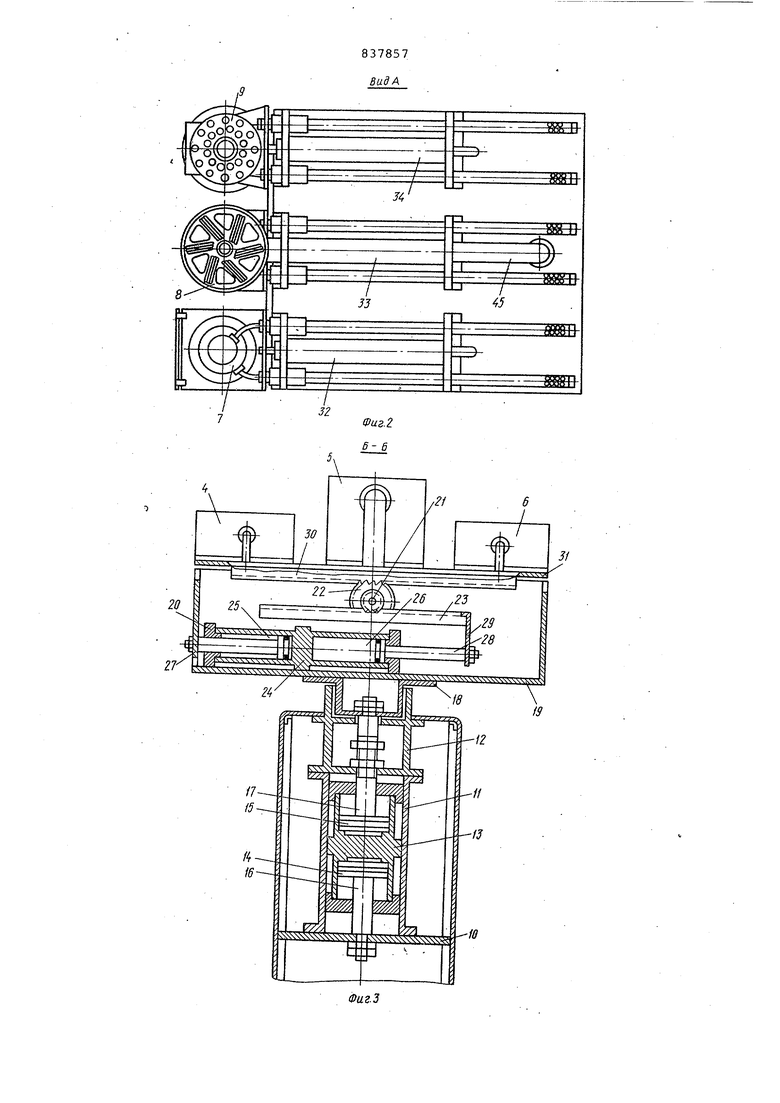
В двухступенчатом телескопическом силовом цилиндре, например в цилиндре 32, первая ступень представляет собой шток-цилиндр 36, в корпусе которого выполнены радиальные отверстия для подвода и отвода воэдуха. В ток-цилиндре 36 смонтирован шток 37 второй ступени и поршень 38 с упором 39, обеспечивающим фиксированную остановку поршня у отверстий. В крышках 40 и 41 телескопического силового цилиндра 32 установлены по две штанги 35 с радиально расположенными отверстиями и внутренними каналами для подвода и отвода воздуха, закрепленные на штоке 37 планкой 42. В крышке 41 установлены две опорные направляющие втулки 43, имеющие герметизированные манжетами 44 камеры с отверстиями для подвода и отвода воздуха. Камеры направляющих втулок 43 выполнены в виде кольцевой проточки на внутренней поверхности втулок 43. Штанги 35 с радиально расположенными о верстйями и внутренними каналами, а также втулки 43 с камерами и отверс тиями служат трубопроводами для подвода и отвода воздуха от исполнительного органа 7 при выдвинутой механической руке 4. На штоке 37 и штангах 35 телескопических силовых цилиндров 32 - 34 жестко крепятся исполнительные органы 7 - 9.
К одному из исполнительных органов 8 жестко прикреплен воздухопровод 45, выполненный в виде телескопического цилиндра 46 и гибкого шланга 47, который крепится в станине 1.
Манипулятор работает следующим образом.
При обслуживании пресс-формы, расположен ной на технологическом оборудовании, манипулятор устанавливается так,I что нижние образующие исполнитель ых органов 7-9 находятся на уровне нижней оформляющей плоскости обслуживаемой пресс-формы,
В левую штоковую полость пневмоцилиндра 20 механизма 3 .горизонтального перемещения подается воздух и шток 28 перемещается влево и с помощью рейки 23, связанной со штоком 28 планкой 29, шестерен 21 и 22 и рейки 30 и перемещает на одну позицию плиту 31, установленную на подшипниках. При этом механическая рука 4 с исполнительным органом 7, предназначенным для съема отпрессованных изделий, устанавливается по центру обслуживаемой пресс-формы, которая в это время находится в раскрытом состоянии. Затем воздух подается в верхнюю поршневую полость пневмоцилиндра 1 в механизме вертикального перемещения. Шток 17 поднимает опорную плиту 18 с закрепленным на ней механизмом 3 горизонтального перемещения, а соответственно, и механические руки 46 с исполнительными органами 7 - 9, на промежуточную позицию. В это время в поршневые полости двухступенчатого телескопического силового цилиндра 32 подается воздух, и исполнительный орган 7, закрепленный на штоке 37 и двух штангах 35, перемещается в зону обслуживаемой пресс-формы, а поршень 38 с упором 39 устанавливается так, что радиальные отверстия шток-цилиндра 36 остаются открытыми. При этом штанги 35 устанавливаются так, что их радиальные отверстия располагаются в.камерах, опорных направляющих втулок 43,
В нижнюю штоковую полость пневмоцилиндра 11 механизма 1 вертикального перемещения подается воздух,шток 17с. опорной плитой 18 опускается и закрепленные на ней механизмы с исполнительными органами 7-9 также опускаются. Специальное устройство исполнительного органа (не показано) предназначенное для съема отпрессованных изделий, находящееся в это время в зоне обслуживаемой пресс-формы накрывает отпрессованные изделия-. Через отверстия, предназначенные для .подвода воздуха, в направляющих втулках 43 и через радиальные отверстия штанг 35 к специальному устройству исполнительного органа 7 по внутренним каналам штанг 35 подается воздух и оно производит съем отпрессованного изделия с плоскости обслуживаемой прессформьт. Далее механическая рука 4 с исполнительным органом 7 перемещается влево на одну позицию, а по центру обслуживаемой пресс-формы располагается механическаярука 5 с исполнительным органом 8, предназначенным для следующей операции обслуживания прессформы и цикл повторяется.
Формула изобретения
в виде двухступенчатого телескопического силового цилиндра, и трубчатых штанг, установленных в опорных направляющих втулках, отличаю щи йс я тем, что, с целью упрощения конструкции, в корпусе силового цилиндpa первой ступени выполнены радиальные отверстия, а поршень силового цилиндра второй ступени снабжен упором.
направляющих втулках выполнены коль цевые проточки, а в трубчатых штангах - радиальные отверстия.
.Источники информации, принятые ВО внимание при экспертизе
1, Авторское свидетельство СССР 5 № 611773, кл. В 25 J 11/00, 1977.
38
35
Фиг4
