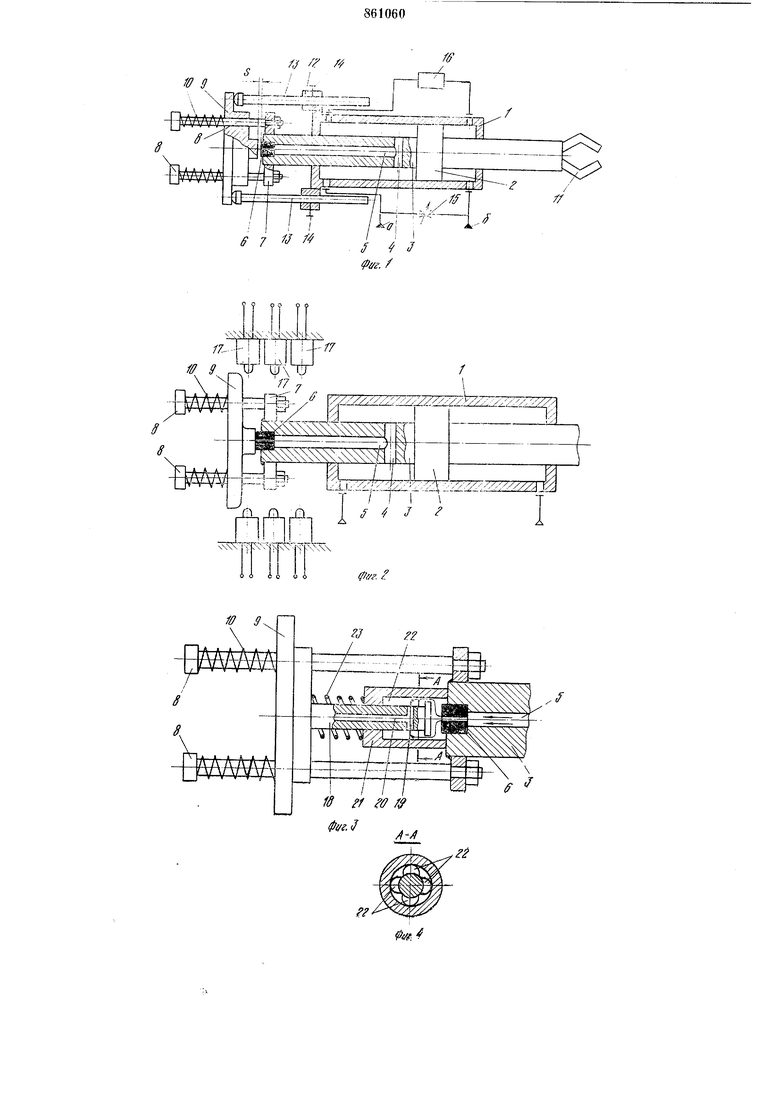
Исполнительный орган манинулятора (фиг. 1) содержит пневмоцилиндр 1 с поршнем 2 и штоком 3, который имеет пересекаюш,иеся поперечный канал 4 и продольный канал 5. Последний снаблсен соплом 6. На этом же конце штока 3 закреплен фланец 7 с пальцами 8, на которых подвижно установлена заслонка 9 с пружинами 10. На противоположном конце штока 3 расположен захват И манипулятора.
На корпусе цилиндра 1 установлен фланец 12, несущий упоры 13, фиксируемые винтами 14. Питающие магистрали исполнительного органа соединены линией с дросселем 15, через который полости пневмоцилиндра сообщаются, кроме того, эти полости соединены с чувствительным элементом 16.
Вариант конструкции исполнительного органа манипулятора (фиг. 2) содержит упоры 17, оснащенные электромагнитными приводами.
Вариант конструкции элементов регулирования хода щтока содерлшт (фиг. 3 и 4) присоединенный к заслонке 9 фигурный стержень 18 с каналами 19 и 20, втулку 21 с каналами 22 и пружину 23.
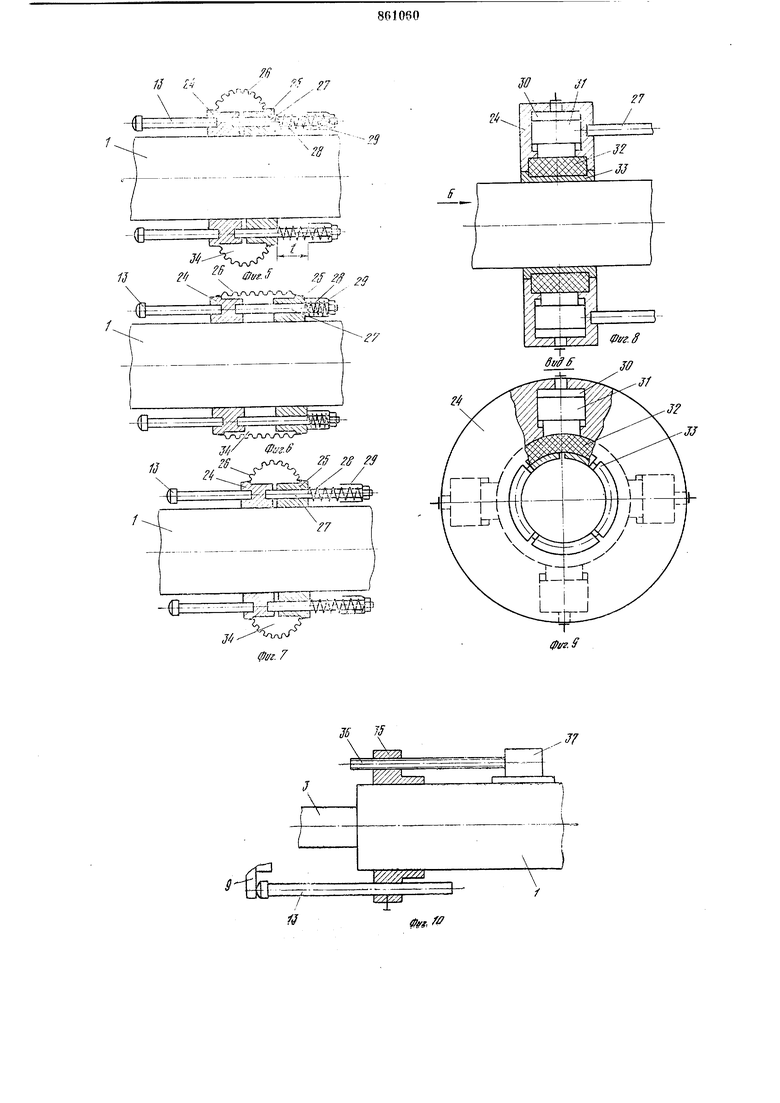
Вариант конструкции фланца, несущего упоры содерл ит (фиг. 5, 6 и 7) кольца 24 и 25, гофрированную трубку 26, направляющие 27, 28 и стаканы 29. Механизм фиксации колец 24 и 25 содержит камеры 30 (фиг. 8 и 9) с поршнями 31, эластичное кольцо 32 и втулку 33. Между кольцами 24, 25 и втулкой 26 образована герметичная полость 34 (фиг. 5, 6 и 7). Вариант, представленный на фиг. 10, содерл ит втулку 35, установленную на цилиндре 1. В резьбовое отверстие втулки 35 ввернут винт 36, управляемый шаговым двигателем 37.
Манипулятор работает следующим образом.
В исходном полол ении сопло 6 штока исполнительного органа перекрыто заслонкой 9. После взятия захватом 11 детали (на фиг. не показана) на исходной позиции, по питающей магистрали а подается воздух в левую полость пневмоцилиндра 1. В правую полость цилиндра через магистраль б подается давление подпора, несколько меньшее, чем .давление, подаваемое по магистрали а. Поэтому поршень 2 со штоком 3 перемещаются вправо. Это перемещение продолл ается до тех пор, пока заслонка 9 не упрется в упоры 13. Тем самым заслонка 9 отойдет от сопла 6, и образуется зазор 5, через который воздух из левой полости истекает наружу, в атмосферу. Как только давление слева и справа от поршня 2 уравняется, шток 3, а значит, и захват И остановятся.
При равенстве давлений справа и слева сработает чувствительный элемент 16, который выдает команду управления на установку детали, находящейся в захвате 11, на сборочную позицию (сборочная позиция на чертежах не показана). После этого по 5 команде чувствительного элемента 16 подача давления по магистрали а прекращается. Давление в правой полости, действуя на поршень 2, отводит его назад - влево - на исходную позицию, и в захват 11 подается 10 новая деталь. Цикл повторяется.
Поскольку зазор 5 весьма мал и его величина очень точно выдерживается, то выведение захвата И на сборочную нозицию осуществляется с высокой точностью, т. е. 15 в данном манипуляторе достигается высокая точность нозиционирования. Установка дросселя 15 нозволяет существенно улучпнпъ динамические характеристики нривода.
0 Величина перемещения штока 3 исполнительного органа регулируется выдвижением упоров 13 и фиксацией их винтами 14.
Элементы, аналогичные заслонке 9 и другим, могут быть установлены и с правой 5 стороны исполнительного органа. Тем самым регулировать ход штока 3 влево, а не только вправо.
Вместо механических упоров могут быть применены электромагнитные (фиг. 2), что 0 расщирит возможности автоматической регулировки хода. В зависимости от того, какой упор 17 включен, остановка будет в разных, запрограммированных заранее местах.
5 При варианте конструкции элементов регулировки хода штока 3, ноказанном на фиг. 3, исполнительный орган работает следующим образом: в момент, когда заслонка 9 отодвигается влево (упорами 13) между 0 соплом 6 и фланцем штока 18 образуется зазор, но воздух через сопло выйти в атмосферу не может, так как втулка 21 прижата пружиной 23 к торцу штока 3.
Поэтому воздух по каналам 22 5 (фиг. 4) втулки 21, каналам 19 и 20 в фигурном стерл :не 18 проходит в управляющее устройство (на чертежах не показано), где вырабатываются необходимые комаиды, иапример, на снижение давления, но0 даваемого в цилиндр. При этом щток 3 продолл ает свое движение вправо. Заслонка 9 удерлшвается упорами, а щток 3, преодолевая усилие иружин 10, перемещается с фланцем 7 и пальцами 8. Это будет 5 продолжаться до тех пор, пока фланец фигурного стерл ня 18, прикрепленного к заслонке 9, не зацепит втулку 21. Вследствие этого последняя отойдет от торца штока 3, воздух из сопла 6 выйдет в атмосферу, и шток 3 остановится. В остальном работа исполнительного органа происходит так, как описано выше.
Работа исполнительного органа при варианте, представленном на фиг. 5, 6 и 7. происходит следующим образом.
В исходном положении кольцо 24, несущие упоры 13 н направляющие 27 расположены так, как показано на фиг. 5, где кольцо 24 зафиксировано, а кольцо 25 расфиксировано. При подаче воздуха в полость 34 кольцо 25 перемещается по цилиндру 1, сжимая пружины 28, пока не упрется в торцы стаканов 29. В этом новом положении (фиг. 6) кольцо 25 останавливается (трубка 26 находится в растянутом состоянии). Затем кольцо 25 фиксируется, а кольцо 24 расфикснруется, и воздух из полости 34 стравливается. Под действием пружин 28 кольцо 24 притягивается, перемещаясь по направляющим 27 вправо, к кольцу 25 и тоже .занимает новое положение, т. е. упоры 13 смещаются на один щаг вправо. После этого при подаче воздуха в полость 34 перемещение упоров можно повторить, причем в зависимости от того, какое из колец фиксируется, перемещение упоров может быть осуществлено в любую сторону. Изменением расстояния 1 между кольцом 25 и стаканом 29 (фиг. 5) можно регулировать величину щага перемещения упоров 13. Таким образом, положение упоров автоматически регулируется.
Механизм фиксации (фиг. 8 и 9) колец 24 и 25 работает так: при подаче сжатого воздуха в камеры 30 поршни 31 сдавливают эластичное (например, гидропластовое) кольцо 32, которое воздействует на втулку 33 и обжимает корпус цилиндра 1, что и обеспечивает фиксацию колец 24 и 25. При стравливании воздуха из камер 30 происходит расфиксация колец.
При работе устройства по варианту, показанному на фиг. 10, в случае необходимости переместить упоры 13 включается двигатель 37, который перемещает втулку 35 с упорами 13 вправо или влево на требуемое расстояние.
Предлагаемая конструкция исполнительного органа обеспечивает исключение ударов щтока в процессе работы, возможность управления плавностью перемещения щтока, автоматизацию установки и фиксации подвижных упоров, повыщение точности позиционирования исполнительного органа при существенном упрощении конструкции по сравнению с прототипом.
Если в прототипе упоры гасят кинетическую энергию всего порщия со щтоком при остановке последних, то в данном устройстве необходимо погасить кинетическую энергию только фланца 9, которая значительно меньще. Тем самым уменьщаются удары, а
значит, характеристики исполнительного органа повыщаются.
Варианты устройства (фиг. 3 и 4 и др.) позволяют обеспечить путевое управление исполнительным органом, что особенно важно в сборочном процессе. В нем легко вырабатывается ряд дополнительных команд, причем в момент, когда захват 11 подходит на сборочную позицию.
Применение подвижных упоров (фиг. 5, б и 7) позволяет автоматизировать остановку исполнительного органа в большом количестве точек (позиций).
Формула изобретения
1.Исполнительный орган манипулятора, содержащий пневмоцилиндр с порщнем, щтоком и питающими магистралями, а также регулируемые упоры, отличающийс я тем, что, с целью повыщения точности нозиционирования и производительности, он снабжен пальцами и кинематически связанной с ними подпружиненной заслонкой, установленной с возможностью взаимодействия с регулируемыми упорами, причем упомянутые упоры смонтированы на корпусе пневмоцилиндра, а в штоке выполнены пересекающиеся поперечные и продольные каналы, выходное отверстие последнего из которых расположено на торце щтока.
2.Исполнительный орган по п. 1, отличающийся тем, что, он снабжен установленным на заслонке фигурным стержнем с каналами и установленной с возможностью перемещения на этом стержне подпружиненной втулкой, в полости которой выполнены продольные пазы.
3.Исполнительный орган по пп. 1 и 2, отличающийся тем, что он снабжен установленными с возможностью перемещения на корпусе пневмоцилиндра кольцами, гофрированной трубкой, посредством которой соединены эти кольца, механизмами их фиксации, стержнями, закрепленными в одном из колец, и образующими пару скольжения с другим кольцом, а также подпружиненными стаканами, закрепленными на конце упомянутых стержней, причем на одном из колец расположены регулируемые упоры.
Источники информации, принятые во внимание при экспертизе 1. Переналаживаемые, сборочные автоматы под ред. В. А. Яхимовича, Киев, «Техника, 1979, с. 62, рис. 35, с. 64, рис. 37.
fj /7 /
fff 9
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования двигателя внутреннего сгорания | 1980 |
|
SU866253A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Автомат для монтажа упругих колец в наружные канавки базовых деталей | 1988 |
|
SU1521549A1 |
| Манипулятор | 1979 |
|
SU841960A1 |
| Механизм для обработки борта к станку для сборки покрышек пневматических шин | 1985 |
|
SU1696314A2 |
| Устройство для сборки деталей | 1979 |
|
SU917994A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Способ сборки направляющих втулок и седел клапанов с головками блоков цилиндров двигателей внутреннего сгорания и устройство для его осуществления | 1985 |
|
SU1425020A1 |
fS 9
18 // eff
фуг,
A-Л
//
/Пп-: -УЛ±
0-- i22zrs r f
г ./// ,f
f//
-л-Щ// - SStrt HK -Й%
Й..
.fvAXV, / /У
/J
/ - : 7:misss
Ч.
/7
W
Г Х1:±Л:5-2ГГР J//
/. 7
фуг.З
