Изобретение относится к средствам автоматизации технологических процессов и может быть использовано в различных отраслях машиностроения, в частности в атомном машиностроении и котлостроении, в металлургическом производстве при автоматизации технологического процесса циркуляционного вакуумирования стали.
Цель изобретения - повышение эксплуатационной надежности за счет устранения ударных перегрузок при резкой остановке поворотной головки и обеспечения плавного ее торможения с последующим стопорением в короткий промежуток времени.
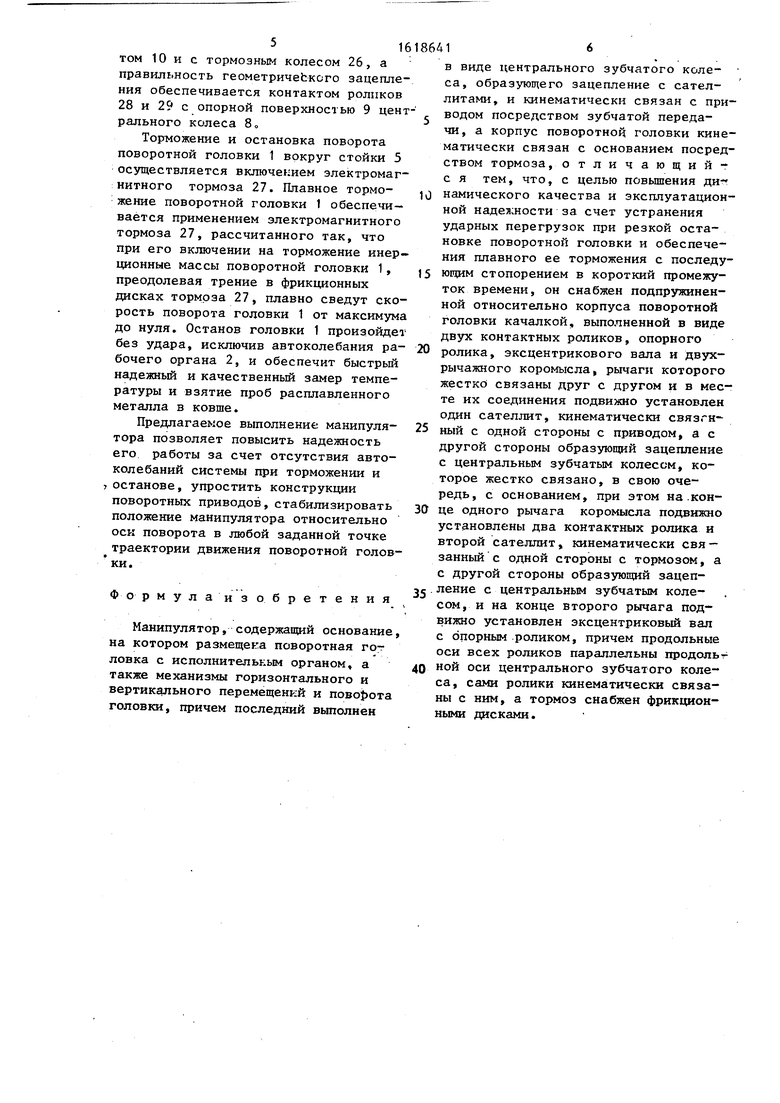
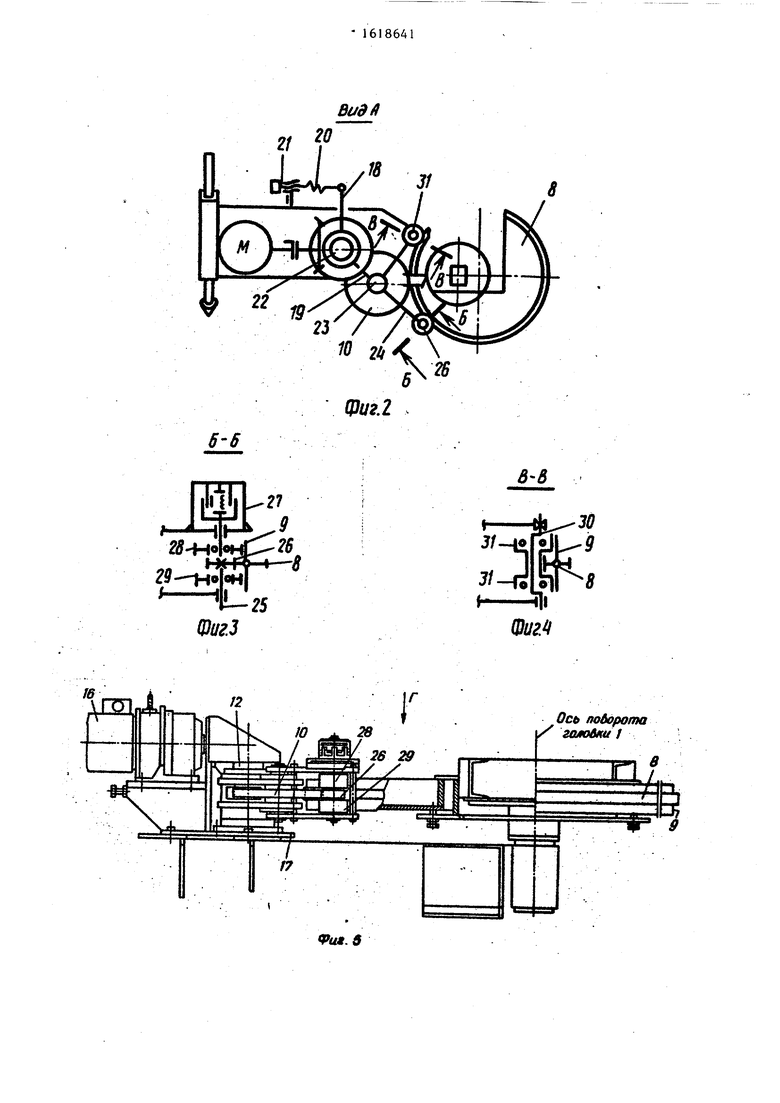
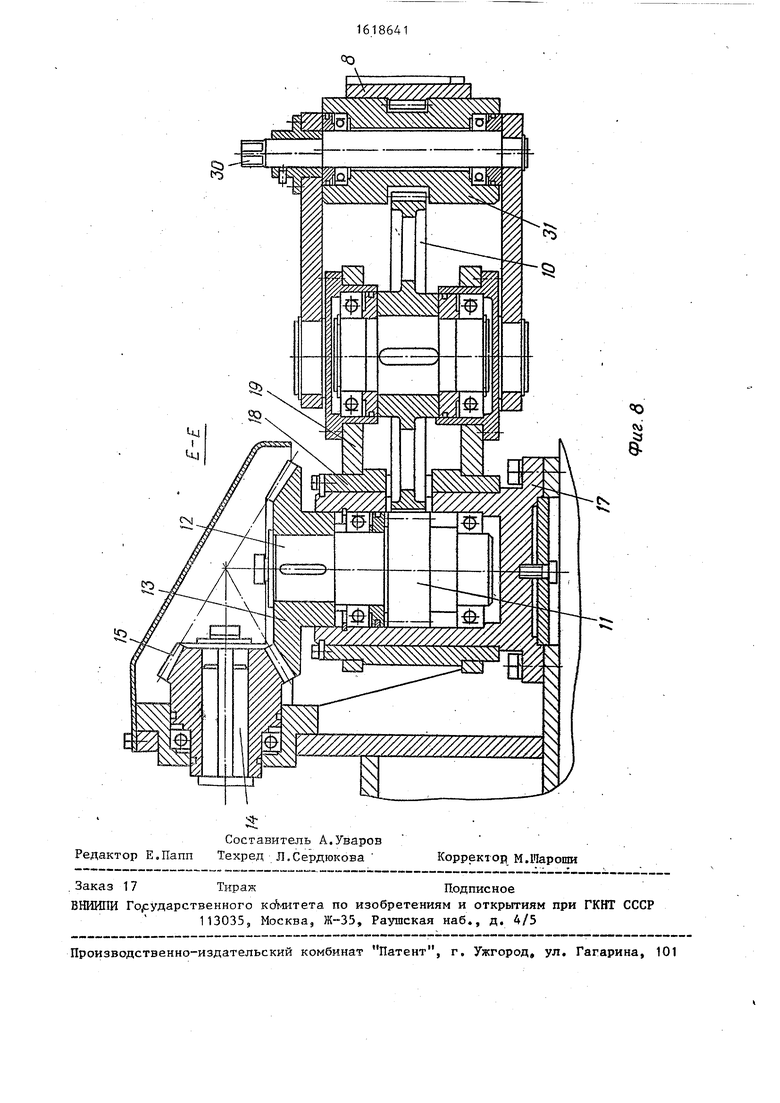
На фиг.1 изображена кинематичес- - кая схема манипулятора; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.-2; на фиг.4 - разрез В-В на фиг.2; на фиг.З - поворотная головка, вид сбоку; на фиг.6 - вид Г на фиг.З; на фиг.7 - разрез Д-Д на фиг.6; на фиг.8 - разрез Е-Е на фиг.6.
Манипулятор содержит поворотную головку 1 с рабочим органом 2 и механизмом ее поворота, закрепленную через подшипники 3 и 4 на стойке 5. установленной на основании 6, жестко связанном с механизмами вертикального и горизонтального перемещения поворотной головки 1 (не показаны). Механизм поворота головки 1 выполнен
можностью поворота..На оси 23 ведущего, сателлита 10 установлено коромысло 24, на одной из консолей которого в подшипниках (без позиции) установлен вал 25 с тормозным колесом 26 на одном конце, входящим в зацепление с основным колесом 8. Электромагнитный тормоз 27 размещен на его про тивоположном конце. Опорные ролики 28 и 29 контактируют с опорной поверхностью 9 центрального зубчатого колеса 8. На другой консоли коромысла 24 в подшипниках (без позиции) установлен с возможностью перенастройки эксцентриковый вал 30 с контактными роликами 31, сопрягающимися с опорной поверхностью 9 центрального зубчатого колеса 8.
При монтаже предлагаемого устройства к эксплуатируемой в литейном : производстве установке циркуляционного вакуумирования стало возможно несовпадение осей в горизонтальной плоскости зубчатого колеса 8 и головки 1 (ввиду сложности монтажных работ, которые проводятся на высоте над проемом под ковш). Возникающий экс-- центриситет нарушает постоянную кинематическую связь зубчатого колеса с ведущим сателлитом 10, что приводит или к заклиниванию зубчатого зацепления или, наоборот, к его расхождению. Указанный недостаток устра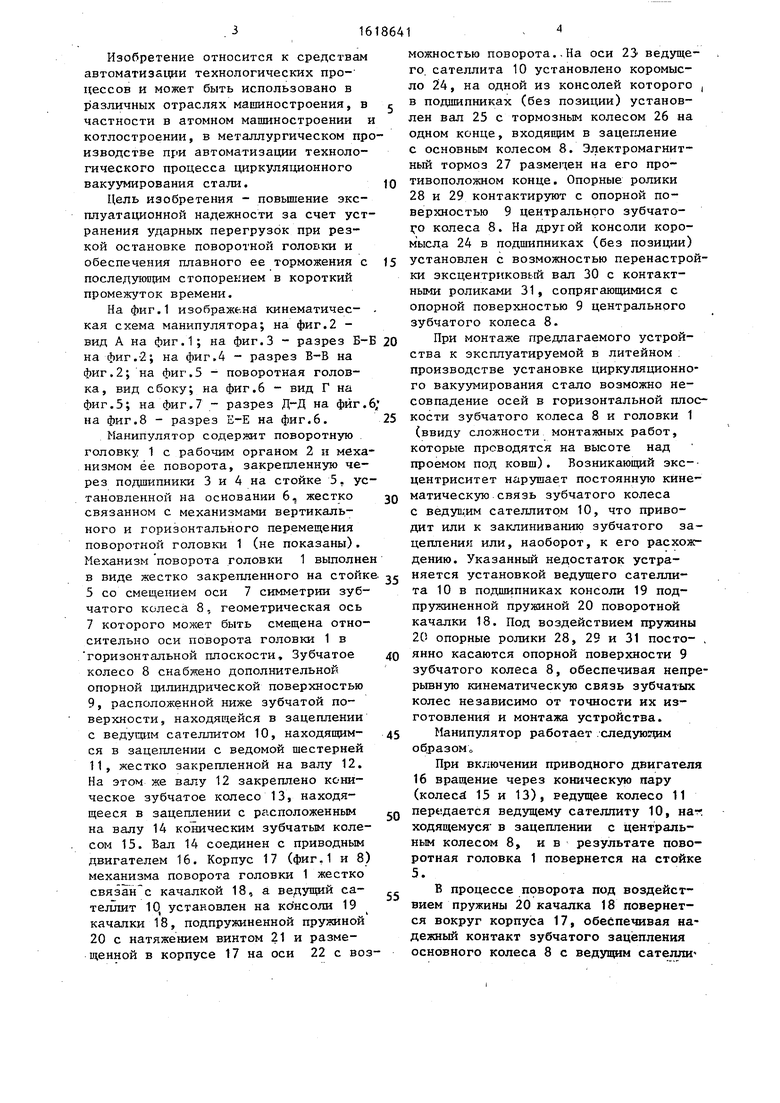
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| ВЕТРОДВИГАТЕЛЬ | 1994 |
|
RU2106525C1 |
| МЕХАНИЗМ ПОВОРОТА | 2007 |
|
RU2340544C1 |
| Привод рабочего органа манипулятора | 1987 |
|
SU1491696A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
Изобретение относится к средствам автоматизации технологических процессов и может быть использовано (в различных отраслях машиностроения, в частности в атомном машиностроении и котлостроении, в металлургическом производстве при автоматиза16 ции технологического процесса циркуляционного вакуумкрования стали. Целью изобретения является повышение эксплуатационной надежности за счет устранения ударных перегрузок при резкой остановке поворотной головки и обеспечения плавного ее торможения с последующим стопорением в короткий промежуток времени. При включении приводного двигателя 16 вращение через зубчатую - передачу передается сателлиту 10 находящемуся в зацеплении с неподвиж -1- ным центральным колесом 8, в результате чего поворотная головка 1 поворачивается на стойке 5„ При включении тормоза головка 1 быстро и плавно стопорится в заданном положении. 8 ил. а 8 (Л фиг.1
в виде жестко закрепленного на стойке. 35 няется установкой ведущего сателли5 со смещением оси 7 симметрии зубчатого колеса 8, геометрическая ось 7 которого может быть смещена относительно оси поворота головки 1 в горизонтальной плоскости, Зубчатое колесо 8 снабжено дополнительной опорной цилиндрической поверхностью 9, расположенной ниже зубчатой поверхности, находящейся в зацеплении с ведупщм сателлитом 10, находящимся в зацеплении с ведомой шестерней 11, жестко закрепленной на валу 12. На этом же валу 12 закреплено коническое зубчатое колесо 13, находящееся в зацеплении с расположенным на валу 14 коническим зубчатым колесом 15. Вал 14 соединен с приводным двигателем 16. Корпус 17 (фиг,1 и 8) механизма поворота головки 1 жестко связан с качалкой 18, а ведущий сателлит 10 установлен на ко нсоли 19 качалки 18, подпружиненной пружиной 20 с натяжением винтом 21 и размещенной в корпусе 17 на оси 22 с воз40
45
50
55
та 10 в подшипниках консоли 19 подпружиненной пружиной 20 поворотной качалки 18. Под воздействием пружины 20 опорные ролики 28, 29 и 31 постоянно касаются опорной поверхности 9 зубчатого колеса 8, обеспечивая непр рывную кинематическую связь зубчатых колес независимо от точности их изготовления и монтажа устройства.
Манипулятор работает .следующим образоМо
При включении приводного двигател 16 вращение через коническую пару (колеса 15 и 13), ведущее колесо 11 передается ведущему сателлиту 10, на ходящемуся в зацеплении с центральным колесом 8, ив результате пово ротная головка 1 повернется на стойк 5.
В процессе поворота под воздействием пружины 20 качалка 18 повернется вокруг корпуса 17, обеспечивая на дежный контакт зубчатого зацепления основного колеса 8 с ведущим сателли
няется установкой ведущего сателли
та 10 в подшипниках консоли 19 подпружиненной пружиной 20 поворотной качалки 18. Под воздействием пружины 20 опорные ролики 28, 29 и 31 посто , янно касаются опорной поверхности 9 зубчатого колеса 8, обеспечивая непрерывную кинематическую связь зубчатых колес независимо от точности их изготовления и монтажа устройства.
Манипулятор работает .следующим образоМо
При включении приводного двигателя 16 вращение через коническую пару (колеса 15 и 13), ведущее колесо 11 передается ведущему сателлиту 10, наг ходящемуся в зацеплении с центральным колесом 8, ив результате поворотная головка 1 повернется на стойке 5.
В процессе поворота под воздействием пружины 20 качалка 18 повернется вокруг корпуса 17, обеспечивая надежный контакт зубчатого зацепления основного колеса 8 с ведущим сателли
516 том 10 и с тормозным колесом 26, а правильность геометрического зацепления обеспечивается контактом роликов 28 и 29 с опорной поверхностью 9 центрального колеса 8
Торможение и остановка поворота поворотной головки 1 вокруг стойки 5 осуществляется включением электромагнитного тормоза 27. Плавное торможение поворотной головки 1 обеспечивается применением электромагнитного тормоза 27, рассчитанного так, что при его включении на торможение инерционные массы поворотной головки 1, преодолевая трение в фрикционных дисках тормоза 27, плавно сведут скорость поворота головки 1 от максимума до нуля. Останов головки 1 произойдет без удара, исключив автоколебания рабочего органа 2, и обеспечит быстрый надежный и качественный замер температуры и взятие проб расплавленного металла в ковше.
Предлагаемое выполнение манипулятора позволяет повысить надежность его работы за счет отсутствия автоколебаний системы при торможении и
останове, упростить конструкции поворотных приводов, стабилизировать положение манипулятора относительно оси поворота в любой заданной точке траектории движения поворотной головки.
Формулаиз обретения
Манипулятор, содержащий основание, на котором размещена поворотная головка с исполнительным органом, а также механизмы горизонтального и вертикального перемещений и поворота головки, причем последний выполнен
641
в виде центрального зубчатого колеса, образующего зацепление с сателлитами, и кинематически связан с при, водом посредством зубчатой передачи, а корпус поворотной головки кинематически связан с основанием посредством тормоза, отличающий- с я тем, что, с целью повышения
Ю намического качества и эксплуатационной надежности за счет устранения ударных перегрузок при резкой остановке поворотной головки и обеспечения плавного ее торможения с последу15 ющим стопорением в короткий промежуток времени, он снабжен подпружиненной относительно корпуса поворотной головки качалкой, выполненной в виде двух контактных роликов, опорного
20 ролика, эксцентрикового вала и двух- рычажного коромысла, рычаги которого жестко связаны друг с другом и в месте их соединения подвижно установлен один сателлит, кинематически связгн
25 ный с одной стороны с приводом, а с другой стороны образующий зацепление с центральным зубчатым колесом, которое жестко связано, в свою очередь, с основанием, при этом на .кон30 це одного рычага коромысла подвижно установлены два контактных ролика и второй сателлит, кинематически свя - занный с одной стороны с тормозом, а с другой стороны образующий зацепэс.ление с центральным зубчатым колесом, и на конце второго рычага подвижно установлен эксцентриковый вал с опорным роликом, причем продольные оси всех роликов параллельны продольг
0 ной оси центрального зубчатого колеса, сами ролики кинематически связаны с ним, а тормоз снабжен фрикционными дисками.
Вид А
Фиг.2
27
ФагЗ
Фи.д
8
8-8
30
9
-rf SN
®М4
Ось поборота I/ галобли /
в
9
f
ft
§
«о
cvj
I
| Манипулятор | 1986 |
|
SU1371897A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
