9.
22
(Л
СА:
00
со
Изобретение относится к машиностроению, а именно к манипуляторам для автоматизации технологических процессов.
Цель изобретения повышение производительности и увеличение надежности за счет обеспечения постоянной кинематической связи зубчатых колес механизма поворота головки и вращения схватов и двигате. 1я.
На чертеже показан манипулятор, общий вид.
Манипулятор содержит корпус I, на ко- lopoM смонтированы соосно поворотная головка 2 со сменными схватами 3, двигатель 4 и кулачок 5. Корпус 1 установлен на опорной плате 6 с возможностью перемещения в направляющих 7 с телами 8 качения. Г абочая поверхность кулачка 5 контактирует с ро:1иком 9, смонтированным на плате 6.
Л exaнизм 10 поворота головки и вращения схватов выполнен в виде гичанетар- ной передачи, состоящей из двух центральных зубчатых Ko;iec И и 12 с наружными зубьями, одного центрального зубчатого колеса 13 с внутренними зубьями, и двух пар сателлитов 14 и 15. Колесо 11 закреп- ,лен) на Ba. iy двигателя 4, колесо 12 - на ва.чу 16 привода вращения схватов 3, оси сателлитов 14 на кулачке 5, а оси са- тел.мнтов 15 - на корпусе 17 головки 2. На кулачке 5, колесе 17 выполнены зубчатые венцы, а на корпусе 1 и зубчатом колесе 13 закреп,:1ены фиксаторы 18-22, подвижные элементы которых размещены с возможностью взаимодействия с упомянутыми зубчатыми венцами.
Опорная плата 6 является подвижным элементом линейного inaroBoro двигателя. Пассивный индуктор выполнен в виде основания 23 с нанесенной на нем коорди- на1ной сеткой.
Л ани1|у.1ятор работает следующим образом.
Вк. 1К)чается линейный ц аговый двигатель и плата 6 с головкой 2 перемещается на позицию загрузки, где происходит выбор пужного схвата 3 поворотом головки 2. Для этого срабатывают фиксаторы 19-21, раз1)единяя колесо 13 и головку 2 с корпусом I и соединяя головку 2 с колесом 13. После этого осуществляется поворот головки 2 от двигателя 4 через колесо И, сателлиты 14 и колесо 13. После поворота схват опускается. Срабатывают фиксаторы 18 19, соединяя колесо 13 с корпусом 1 и разъединяя кулачок 5 с корпусом 1. Кулачок 5 получает вращение через колесо 11 и сате. клиты 14, вследствие чего корпус 1 совместно с головкой и схватами опускается в направляющих 7 и останавливается в заданном положении. После захвата детали осуществляется реверс двигателя 4 и кулачок возвращается в исходное положение.
Для фиксации детали схват поворачи вается на заданный угол. Для этого срабатывают фиксаторы 18-21, разъединяя колесо 13 с корпусом 1 и головкой 2 и соединяя кулачок 5 и головку 2 с корпусом 1. Схваты 3 получают ващение через колесо 11, сателлиты 14, колесо 13, сателлиты 15 и колесо 12. Для параллельной работы (г1ОД1 ем и поворот схватов) срабатывают фиксаторы 18 и 22, при этом разъединяется кулачок 5 с корпусом I и соединяется кулачок 5 с колесом 13.
5
0
5
Формула изобретения
0 Манипулятор, содержащий подвижно установленный на опорной плите корпус, поворотную головку со сменными схватами, в корпусе которой смонтирован вал привода вращения схватов, механизм поворота головки и вращения схватов, кулачок привода перемещения корпуса манипулятора и двигатель, на выходном валу которого закреплено зубчатое колесо, отличающийся тем, что, с целью повышения производительности и увеличения надежности за счет обеспечения постоянной кинематической связи зубчатых колес механизма поворота головки и вращения схватов и двигателя, он снабжен устройствами стопорения, на валу привода закреплено дополнительно введенное колесо и механизм поворота головки и вращения схватов выполнен в виде 1ланетарной передачи, содержащей две пары сателлитов и одно общее для них центральное колесо с внутренними зубьями, причем оси одной пары сателлитов закреплены на упомянутом кулачке, а их вен0 цы находятся в зацеплении с зубчатым колесом двигателя и упомянутым общим центральным колесом, оси второй пары сателлитов закреплены на корпусе поворотной головки, а их зубчатые венцы находятся в зацеплении с дополнительно введенным зубчатым колесом и с общим центральным колесом планетарной передачи, при этом рабочие элементы устройств стопорения расположены с возможностью фиксации указанных кулачка, центрального колеса планеQ тарной передачи и корпуса поворотной головки относительно корпуса манипулятора, а также с возможностью фиксации центрального колеса относительно корпуса поворотной головки и кулачка.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1593944A1 |
| Манипулятор | 1982 |
|
SU1123844A1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Зажимное устройство для токарного станка | 1983 |
|
SU1127696A1 |
| Манипулятор | 1988 |
|
SU1618641A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Автоматическая револьверная головка | 1978 |
|
SU753551A1 |
| Автоматическая револьверная головка | 1979 |
|
SU874266A2 |
Изобретение относится к машиностроению, а именно к манипуляторам для авто- мати;1аиии техно.чосических процессов. Цель изобретенияновьпнение производительности и уве.1иче11ие надежности за счет обеспечения постоянной кинематической связи зубчатых колес механизма поворота головки и вращения схватов и двигателя. При включении линейного шагового двигателя плата 6 перемеп1ает манипулятор со схватами 3 по основанию 23 в требуемую зону. Поворот головки 2 со схватами 3 осуществляется от двигателя 4 через колесо 11, сателлиты 14 и колесо 13. При опускании головки со схватами срабатывают фиксаторы 18-19, соединяя колесо 13 с корпусом 1 и разъединяя кулачок 5 с корпусом I, при этом кулачок 5 получает вращение через колесо 1 1 и сателлиты 14. 1 ил.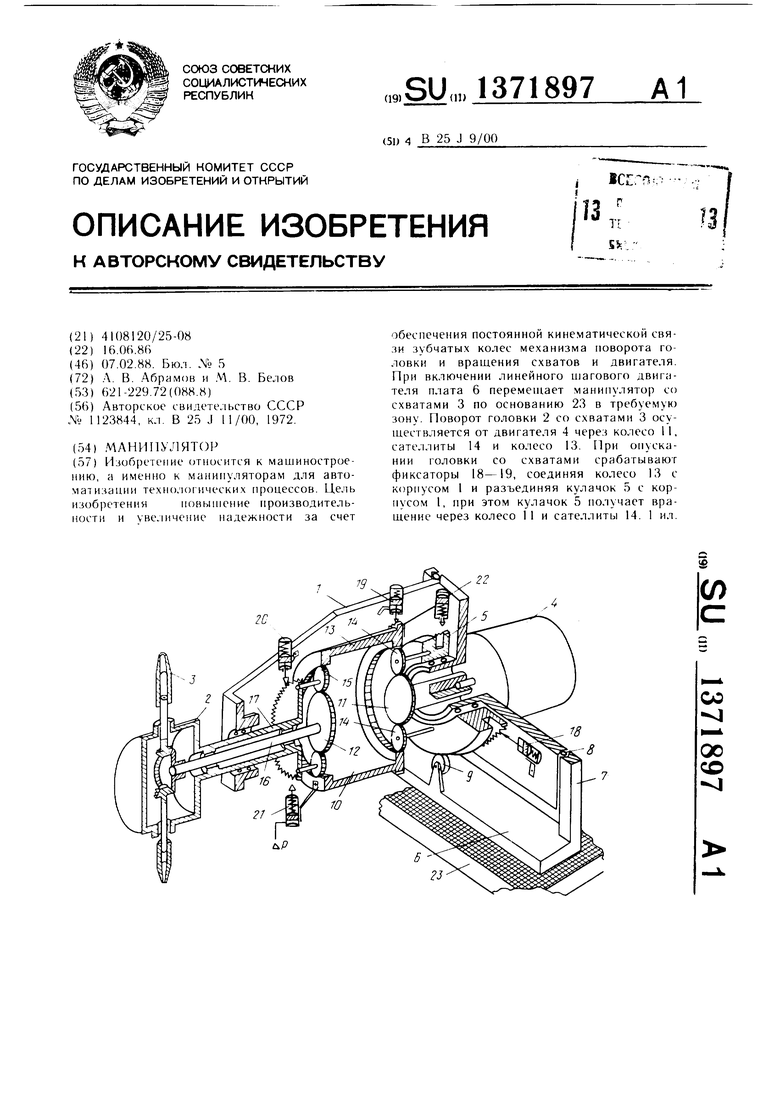
| Манипулятор | 1982 |
|
SU1123844A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
