К П
10 13
1 I 18 W го
9
(Л
4 СО
05
со
05
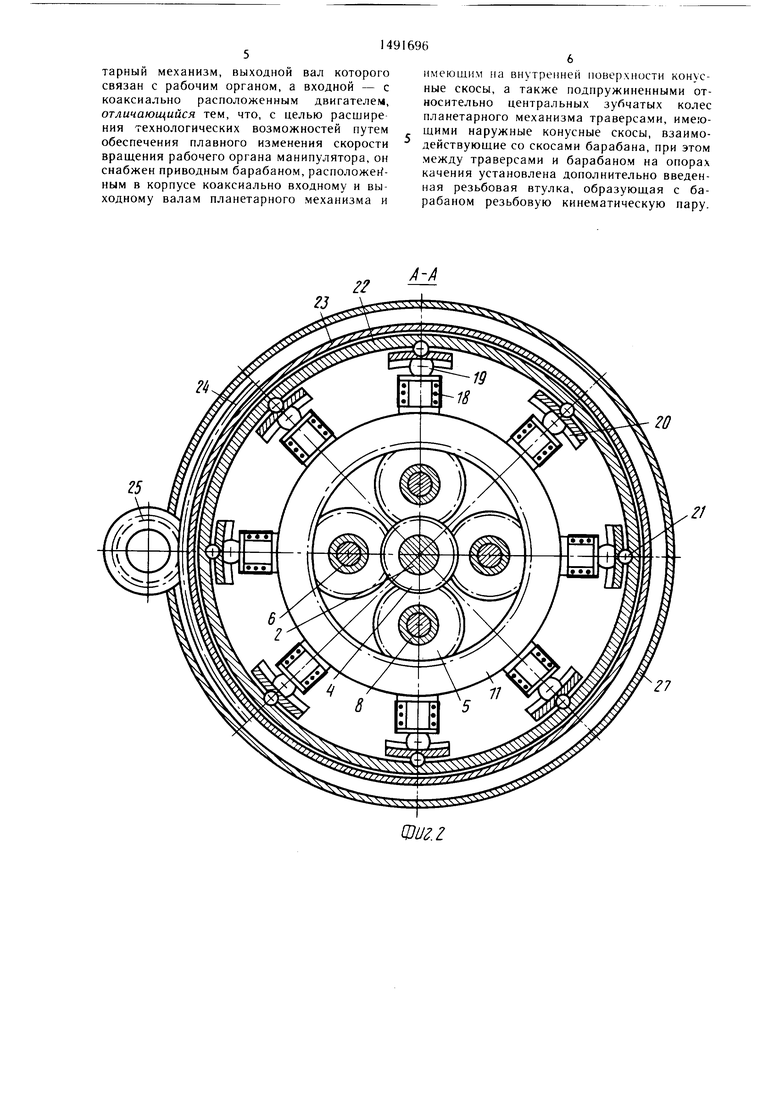
НИИ рабочего органа манипулятора получают за счет поочередного торможения с разным тормозным моментом или водила 8 или центрального зубчатого колеса 11, осуществляемого через подпружиненные траверсы 20, наружные конусные скосы которых взаимодействуют с внутренними конусными скосами приводного барабана 23. Барабан 23
образует резьбовую кинематическую пару со втулкой 22, расположенной между ним и траверсами на опорах 19 качения, и по ее резьбе смещается относительно траверс 20. За счет этого смещения изменяются тормозные моменты на водиле 8 и колесе 11. 5 ил.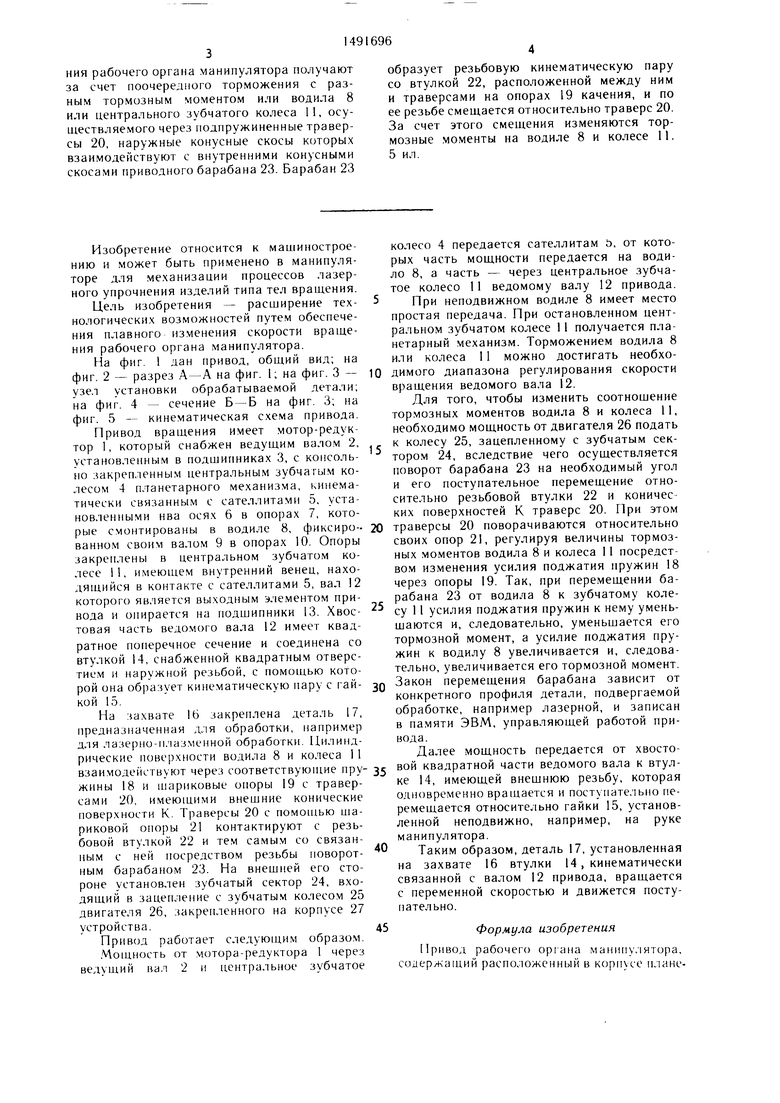
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
| ЭЛЕКТРОПРИВОД | 2000 |
|
RU2173420C1 |
| ГРУЗОВАЯ ЛЕБЕДКА | 1996 |
|
RU2096309C1 |
| Пневматический винтоверт | 1984 |
|
SU1284818A1 |
| Устройство для сборки резьбовых соединений | 1990 |
|
SU1803317A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С РЕГУЛИРУЕМЫМ ПЕРЕДАТОЧНЫМ ОТНОШЕНИЕМ | 2007 |
|
RU2347965C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2382916C1 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2380596C1 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| ПЛАНЕТАРНАЯ СОСТАВНАЯ КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2382257C1 |
Изобретение относится к области машиностроения и может быть применено в манипуляторе для механизации процессов лазерного упрочнения изделий типа тел вращения. Цель изобретения - расширение технологических возможностей путем обеспечения плавного изменения скорости вращения рабочего органа манипулятора. Плавное изменение скорости вращения рабочего органа манипулятора получают за счет поочередного торможения с разным тормозным моментом или водила 8, или центрального зубчатого колеса 11, осуществляемого через подпружиненные траверсы 20, наружные конусные скосы которых взаимодействуют с внутренними конусными скосами приводного барабана 23. Барабан 23 образует резьбовую кинематическую пару со втулкой 22, расположенной между ним и траверсами на опорах 19 качения, и по ее резьбе смещается относительно траверс 20. За счет этого смещения изменяются тормозные моменты на водиле 8 и колесе 11. 5 ил.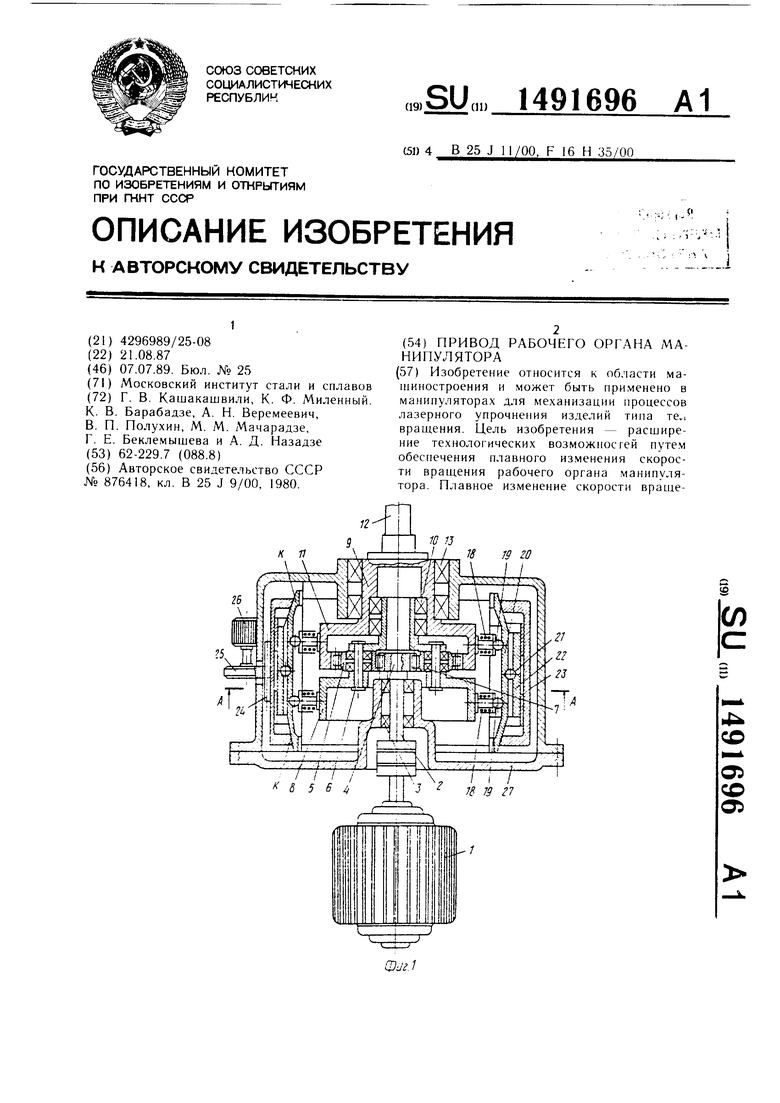
Изобретение относится к мащинострое- нию и может быть применено в манипуляторе для механизации процессов лазерного упрочнения изделий типа тел вращения.
Цель изобретения - расширение технологических возможностей путем обеспечения плавного изменения скорости вращения рабочего органа манипулятора.
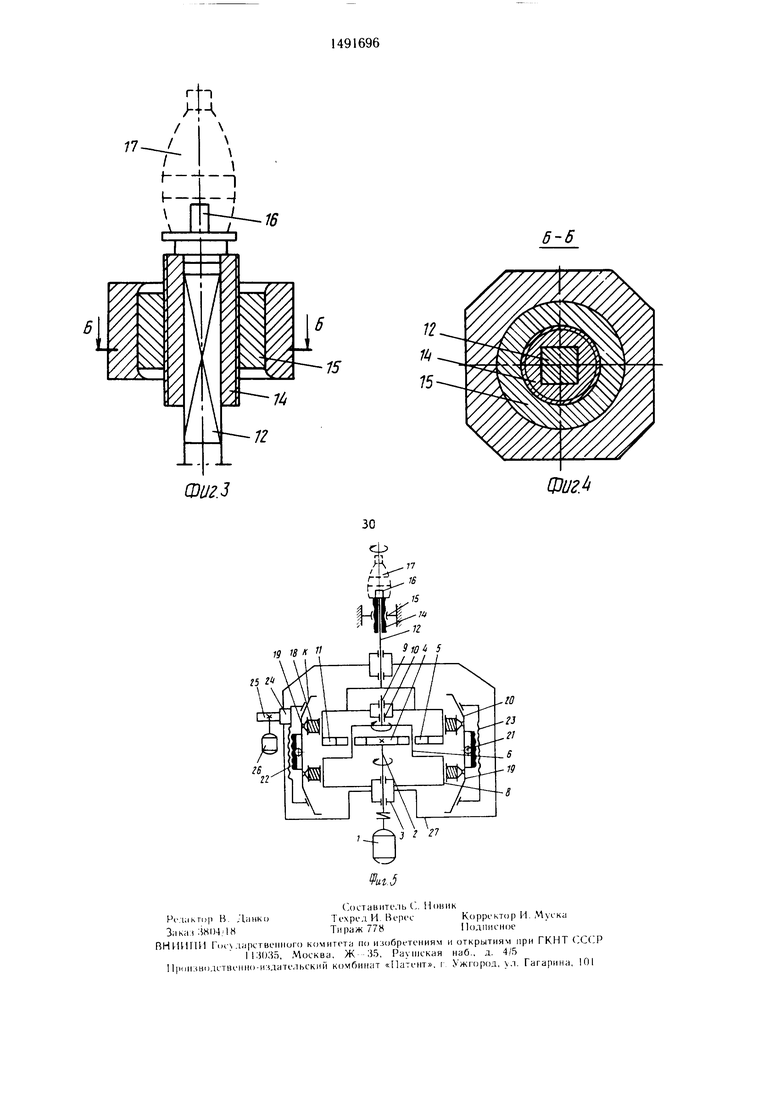
На фиг. 1 дан привод, общий вид; на фиг. 2 - разрез .-А на фиг. I; на фиг. 3 - узел установки обрабатываемой детали; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - кинематическая схема привода.
Привод вращения имеет мотор-редуктор 1, который снабжен ведущим валом 2, установленным в подщипниках 3, с консоль- но закрепленным центральным зубчатым колесом 4 планетарного механизма, кинематически связанным с сателлитами 5, установленными нва осях 6 в опорах 7, которые смонтированы в водиле 8, фиксированном своим валом 9 в опорах 10. Опоры закреплены в центральном зубчатом колесе 11, имеющем внутренний венец, находящийся в контакте с сателлитами 5, вал 12 которого является выходным элементом привода и опирается на подщипники 13. Хвостовая часть ведомого вала 12 имеет квадратное поперечное сечение и соединена со втулкой 14, снабженной квадратным отверстием и наружной резьбой, с помощью которой она образует кинематическую пару с гайкой 15.
На захвате 16 закреплена деталь 17, предназначенная для обработки, например для лазерно-п.чазменной обработки. Цилиндрические поверхности водила 8 и колеса 11 взаимодействуют через соответствуюп1ие пружины 18 и шариковые опоры 19 с траверсами 20, имеющими внешние конические поверхности К. Траверсы 20 с помощью шариковой опоры 21 контактируют с резьбовой втулкой 22 и тем самым со связанным с ней посредством резьбы поворотным барабаном 23. На внешней его стороне установлен зубчатый сектор 24, входящий в зацепление с зубчатым колесом 25 двигателя 26, закрепленного на корпусе 27 устройства.
Привод работает следующим образом.
Мощность от мотора-редуктора 1 через ведущий вал 2 и центральное зубчатое
5
колесо 4 передается сателлитам 5, от которых часть мощности передается на водило 8, а часть - через центральное зубчатое колесо 11 ведомому валу 12 привода. 5 Цри неподвижном водиле 8 имеет место простая передача. При остановленном центральном зубчатом колесе 11 получается планетарный механизм. Торможением водила 8 или колеса 11 можно достигать необхо0 димого диапазона регулирования скорости вращения ведомого вала 12.
Для того, чтобы изменить соотношение тормозных моментов водила 8 и колеса 11, необходимо мощность от двигателя 26 подать к колесу 25, зацепленному с зубчатым сектором 24, вследствие чего осуществляется поворот барабана 23 на необходимый угол и его поступательное перемещение относительно резьбовой втулки 22 и коничес ких поверхностей К траверс 20. При этом
траверсы 20 поворачиваются относительно своих опор 21, регулируя величины тормозных моментов водила 8 и колеса 11 посредством изменения усилия поджатия пружин 18 через опоры 19. Так, при перемещении барабана 23 от водила 8 к зубчатому колесу 11 усилия поджатия пружин к нему уменьшаются и, следовательно, уменьшается его тормозной момент, а усилие поджатия пружин к водилу 8 увеличивается и, следовательно, увеличивается его тормозной момент. Закон перемещения барабана зависит от конкретного профиля детали, подвергаемой обработке, например лазерной, и записан в памяти ЭВМ, управляющей работой привода.
Далее мощность передается от хвостос вой квадратной части ведомого вала к втулке 14, имеющей внешнюю резьбу, которая одновременно вращается и поступательно перемещается относительно гайки 15, установленной неподвижно, например, на руке манипулятора.
Таким образом, деталь 17, установленная на захвате 16 втулки 14, кинематически связанной с валом 12 привода, вращается с переменной скоростью и движется поступательно.
5Формула изобретения
Привод рабочего органа манипулятора, содержащий расположенный в корпусе плане5
0
0
тарный механизм, выходной вал которого связан с рабочим органом, а входной - с коаксиально расположенным двигателем, отличающийся тем, что, с целью расшире ния технологических возможностей путем обеспечения плавного изменения скорости вращения рабочего органа манипулятора, он снабжен приводным барабаном, расположеь(- ным в корпусе коаксиально входному и выходному валам планетарного механизма и
F
имеющим на внутренней поверхности конусные скосы, а также подпружиненными относительно центральных зубчатых колес планетарного механизма траверсами, имеющими наружные конусные скосы, взаимодействующие со скосами барабана, при этом между траверсами и барабаном на опорах качения установлена дополнительно введенная резьбовая втулка, образующая с барабаном резьбовую кинематическую пару.
20
27
Фи.2
шиг.з
25 гч
6-6
Фиг.
| Привод манипулятора | 1980 |
|
SU876418A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
