I
Изобретение относится к манипуляторостроению и может быть использовано в исполнительных и задающих органах дистанционных копирующих манипуляторов и в исполнительных органах роботов-манипуляторов.
Известен манипулятор, содержащий приводные валы с коническими щестернями, блоки конических и цилиндрических колес, одно из которых жестко связано с неподвижным звеном щарнирного соединения механической руки, и конические дифференциалы 1.
Недостатком известного манипулятора является возникновение взаимовлияния движений приводимых валов при относительном вращении звеньев.
Цель изобретения - устранение взаимовлияния движений приводимых валов при относительном вращении звеньев.
Поставленная цель достигается тем, что конические дифференциалы, включенные в приводные валы, выполнены двухступенчатыми, причем на водиле одной ступени дифференциала установлены два комплекта цилиндрических сателлитов, кинематически связанных между собой, каждый из
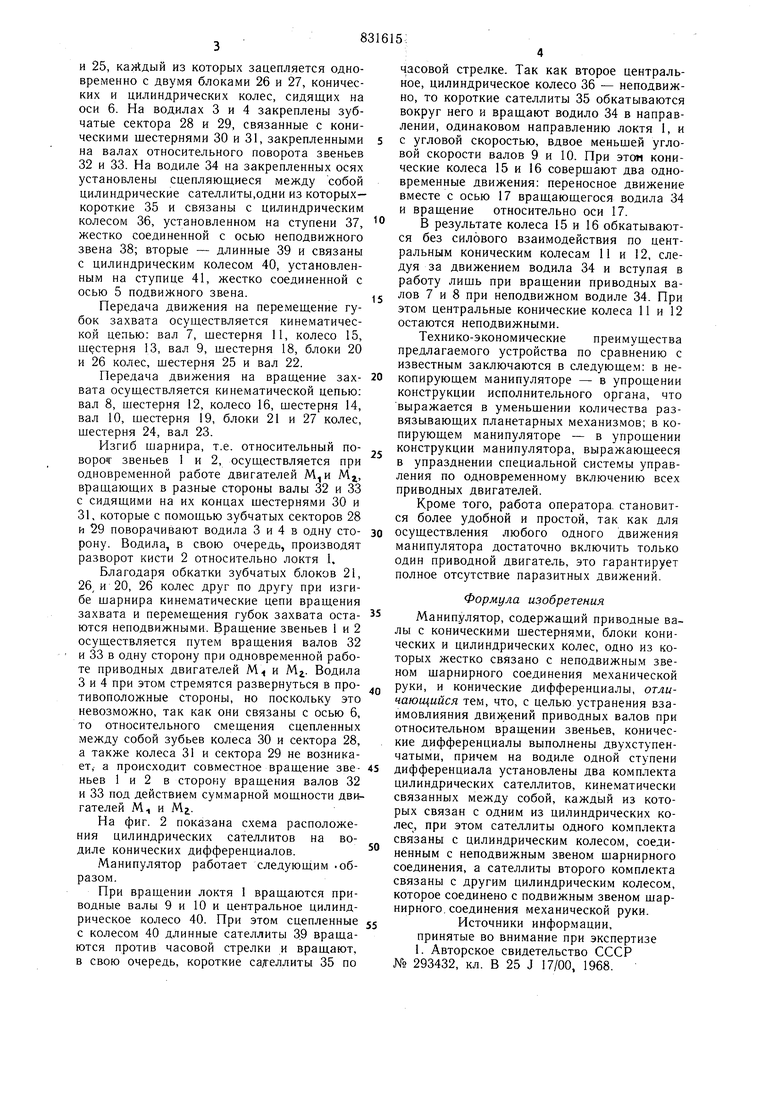
которых связан с одним из цилиндрических колес, при этом сателлиты одного комплекта связаны с цилиндрическим колесом, соединенным с неподвижным звеном щарнирного соединения, а сателлиты второго комплекта сбязаны с другим цилиндрическим колесом, которое соединено с подвижным звеном шарнирного соединения механической руки. На фиг. 1 изображена кинематическая схема манипулятора; на фиг. 2 -,разрез А-А на фиг. 1.
Манипулятор содержит локоть 1 и кисть
2, соединенные между собой водилом, выполненным в виде параллельных водил 3 и 4, установленных на осях 5 и 6. В локтевом звене установлены составные приводные валы 7-10 с коническими щестернями 11 -
14 на концах, зацепляющиеся соответственно с коническими колесами-сателлитами 15 и 16, установленными на зацепленной в водиле конического дифференциала оси 17. Кроме того, на валах 9 и 10 закреплены
конические щестерни 18 и 19, каждая из которых зацепляется одновременно с двумя блоками 20 и 2 конических и цилиндрических колес. В кистевом звене установлены приводные валы 22 и 23 с шестернями 24 и 25, Ka rtflbifl из которых зацепляется одновременно с двумя блоками 26 и 27, конических и цилиндрических колес, сидящих на оси 6. На водилах 3 и 4 закреплены зубчатые сектора 28 и 29, связанные с коническими шестернями 30 и 31, закрепленными на валах относительного поворота звеньев 32 и 33. На водиле 34 на закрепленных осях установлены сцепляющиеся между собой цилиндрические сателлиты,одни из которых- короткие 35 и связаны с цилиндрическим колесом 36, установленном на ступени 37, жестко соединенной с осью неподвижного звена 38; вторые - длинные 39 и связаны с цилиндрическим колесом 40, установленным на ступице 41, жестко соединенной с осью 5 подвижного звена. Передача движения на перемещение губок захвата осуществляется кинематической цепью: вал 7, щестерня 11, колесо 15, щестерня 13, вал 9, шестерня 18, блоки 20 и 26 колес, шестерня 25 и вал 22. Передача движения на вращение захвата осуществляется кинематической цепью; вал 8, шестерня 12, колесо 16, шестерня 14, вал 10, шестерня 19, блоки 21 и 27 колес, шестерня 24, вал 23. Изгиб шарнира, т.е. относительный поворос звеньев 1 и 2, осуществляется при одновременной работе двигателей М, и М, вращающих в разные стороны валы 32 и 33 с сидящими на их концах шестернями 30 и 31, которые с помощью зубчатых секторов 28 и 29 поворачивают водила 3 и 4 в одну сторону. Водила, в свою очередь, производят разворот кисти 2 относительно локтя I. Благодаря обкатки зубчатых блоков 21, 26, и 20, 26 колес друг по другу при изгибе шарнира кинематические цепи вращения захвата и перемещения губок захвата остаются неподвижными. Вращение звеньев 1 и 2 осуществляется путем вращения валов 32 и 33 в одну сторону при одновременной работе приводных двигателей М и М. Водила 3 и 4 при этом стремятся развернуться в противоположные стороны, но поскольку это невозможно, так как они связаны с осью 6, то относительного смещения сцепленных между собой зубьев колеса 30 и сектора 28, а также колеса 31 и сектора 29 не возникает,- а происходит совместное вращение звеньев 1 и 2 в сторону вращения валов 32 и 33 под действием суммарной мощности двигателей М., и MZ,. На фиг. 2 показана схема расположения цилиндрических сателлитов на водиле конических дифференциалов. Манипулятор работает следующим -образом. При вращении локтя 1 вращаются приводные валы 9 и 10 и центральное цилиндрическое колесо 40. При этом сцепленные с колесом 40 длинные сателлиты 39 вращаются против часовой стрелки и вращают, в свою очередь, короткие саделлиты 35 по часовой стрелке. Так как второе центральное, цилиндрическое колесо 36 - неподвижно, то короткие сателлиты 35 обкатываются вокруг него и вращают водило 34 в направлении, одинаковом направлению локтя 1, и с угловой скоростью, вдвое меньщей угловой скорости валов 9 и 10. При этой конические колеса 15 и 16 совершают два одновременные движения: переносное движение вместе с осью 17 вращающегося водила 34 и вращение относительно оси 17. В результате колеса 15 и 16 обкатываются без силового взаимодействия по центральным коническим колесам 11 и 12, следуя за движением водила 34 и вступая в работу лишь при вращении приводных валов 7 и 8 при неподвижном водиле 34. При этом центральные конические колеса 11 и 12 остаются неподвижными. Технико-экономические преимущества предлагаемого устройства по сравнению с известным заключаются в следующе.м: в некопирующем манипуляторе - в упрощении конструкции исполнительного органа, что выражается в уменьшении количества развязывающих планетарных механизмов; в копирующем манипуляторе - в упрощении конструкции манипулятора, выражающееся в упразднении специальной системы управления по одновременному включению всех приводных двигателей. Кроме того, работа оператора, становится более удобной и простой, так как для осуществления любого одного движения манипулятора достаточно включить только один приводной двигатель, это гарантирует полное отсутствие паразитных движений. Формула изобретения Манипулятор, содержащий приводные валы с коническими шестернями, блоки конических и цилиндрических колес, одно из которых жестко связано с неподвижным звеном шарнирного соединения механической руки, и конические дифференциалы, отличающийся тем, что, с целью устранения взаимовлияния движений приводных валов при относительном вращении звеньев, конические дифференциалы выполнены двухступенчатыми, причем на водиле одной ступени дифференциала установлены два комплекта цилиндрических сателлитов, кинематически связанных между собой, каждый из которых связан с одним из цилиндрических колес, при этом сателлиты одного комплекта связаны с цилиндрическим колесом, соединенным с неподвижным звеном шарнирного соединения, а сателлиты второго комплекта связаны с другим цилиндрическим колесом, которое соединено с подвижным звеном шарнирного, соединения механической руки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 293432, кл. В 25 J 17/00, 1968.
///////
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1240581A2 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Шарнирное соединение звеньев манипулятора | 1978 |
|
SU699748A2 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| ВАРИАТОРНЫЙ ПРИВОД МОБИЛЬНОЙ МАШИНЫ | 2002 |
|
RU2205110C1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор | 1970 |
|
SU334777A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Манипулирующее устройство | 1983 |
|
SU1113973A1 |
| Шарнирное соединение звеньев манипулятора | 1978 |
|
SU704777A2 |

