1
(21)4425329/10
(22)13.04.88
(46) 15.01.91. Бюл. № 2
(71)Завод Фиолент
(72)В.П.Ивашкин, В.И.Безсонов и А,Б.Улыбин
(53)681 .84.083.8 (088.8)
(56)Патент США № 4404606, кл. 360/105, 1985.
Патент Японии 60-21419, кл. G 11 В 15/10, 1985.
(54)ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ КАССЕТНОГО МАГНИТОФОНА
(57)Изобретение относится к устройствам магнитной записи и позволяет уменьшить вес и габариты магнитофона, сохраняя объем выполняемых функций записи-воспроизведения и поиска фонограмм, обеспечивая режим ускоренной перемотки без дополнительного двигателя. Это достигается тем, что управляющий диск (УД) перемещения с зубьями и тремя вырезами на внешней боковой поверхности установлен с возможностью вхождения его зубчатой части
ч зацепление с шестерней маховика и снабжен тремя упорами и кулачками с профилями. На нижней поверхности УД выполнены три концентричных канавки,
средняя из которых выполнена круговой, а внешняя и внутренняя имеют ограниченную длину и переходы в средний паз. Ползун, снабженный канавкой, установлен с возможностью перемещения в поперечном относительно концентричных канавок направлении для образования перехода средний паз - внут- рений паз. Датчик положения УД электрически связан с микропроцессорным блоком управления. Рычажная система (PC) служит для обеспечения связи между штоком электромагнита и подвижными элементами конструкции и включает спусковой, исполнительный и переводной рычаги. Спусковой рычаг соеди- с нен со штоком электромагнита, установлен с возможностью перемещения ис- {Л полнительного рычага и снабжен криво- ят линейной поверхностью для перемещения V ползуна УД в положение либо образова- Ь ния перехода средний паз - внутренний S паз, либо выведения конца переводного, рычага узла перемоток во внешний паз УД. Исполнительный служит для перемещения платы магнитных головок в положения записи-воспроизведения и поиска фонограмм и для обеспечения холостого хода кулачка УД в режимах перемоток. ТО ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ КАССЕТНОГО МАГНИТОФОНА | 1992 |
|
RU2054202C1 |
| Устройство для наклонно-строчной магнитной записи и воспроизведения | 1988 |
|
SU1582200A1 |
| Лентопротяжный механизм | 1988 |
|
SU1607005A1 |
| Реверсивный лентопротяжный механизм | 1989 |
|
SU1683068A1 |
| Устройство для наклонно-строчной магнитной записи и воспроизведения | 1986 |
|
SU1515196A1 |
| Устройство для подачи и накопления сигарет | 1976 |
|
SU663287A3 |
| Устройство для заправки носителя информации в магнитофоне | 1986 |
|
SU1521295A3 |
| Устройство управления лентопротяжным механизмом | 1988 |
|
SU1638727A1 |
| Записывающее и/или воспроизводящее устройство для ленточного носителя информации | 1989 |
|
SU1838832A3 |
| Приспособление для автоматической установки дистанционной трубки в заряженном орудии | 1929 |
|
SU25441A1 |


Изобретение относится к устройствам магнитной записи и воспроизведения , в частности к лентопротяжным механизмам кассетных магнитофонов, обеспечивающим режимы записи-воспроизведения, ускоренных перемоток, поиска фонограмм по паузе и автостопа с упра влением легким нажатием (псевдосенсорное управление), и может быть использовано как в переносной, так и в стационарной аппаратуре.
Целью изобретения является упрощение, уменьшение габаритов и веса лентопротяжного механизма.
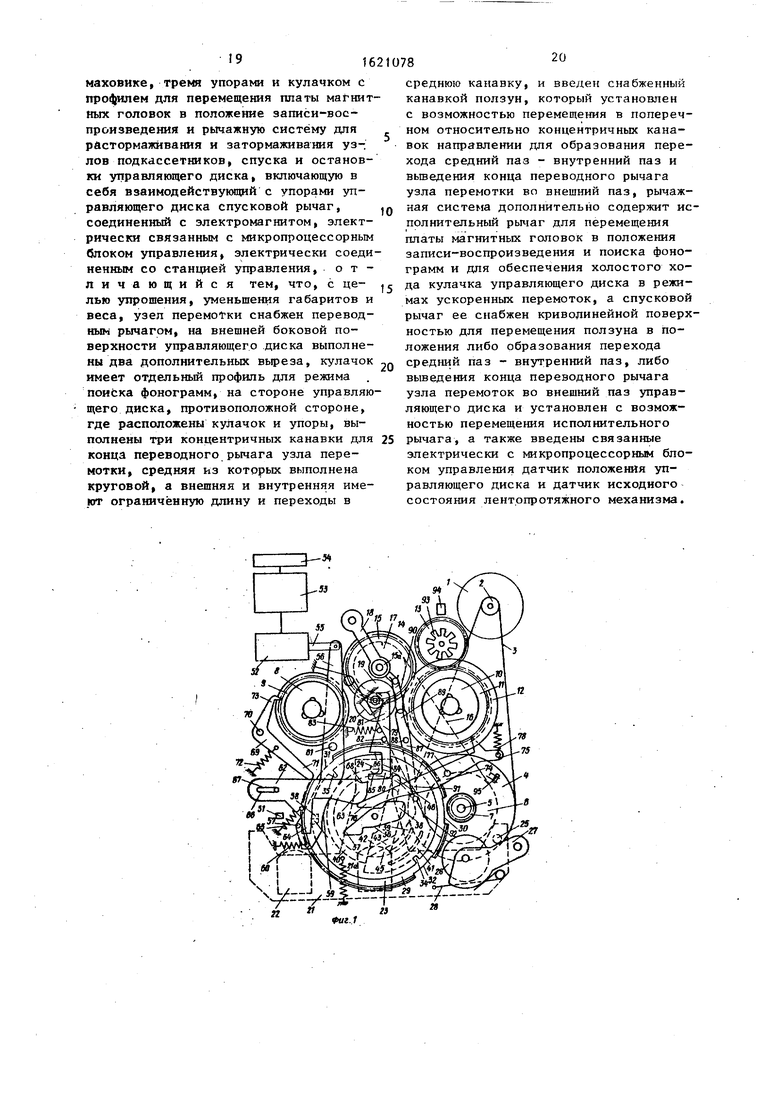
На фиг.1 изображен лентопротяжный механизм, исходное положение; на
J1
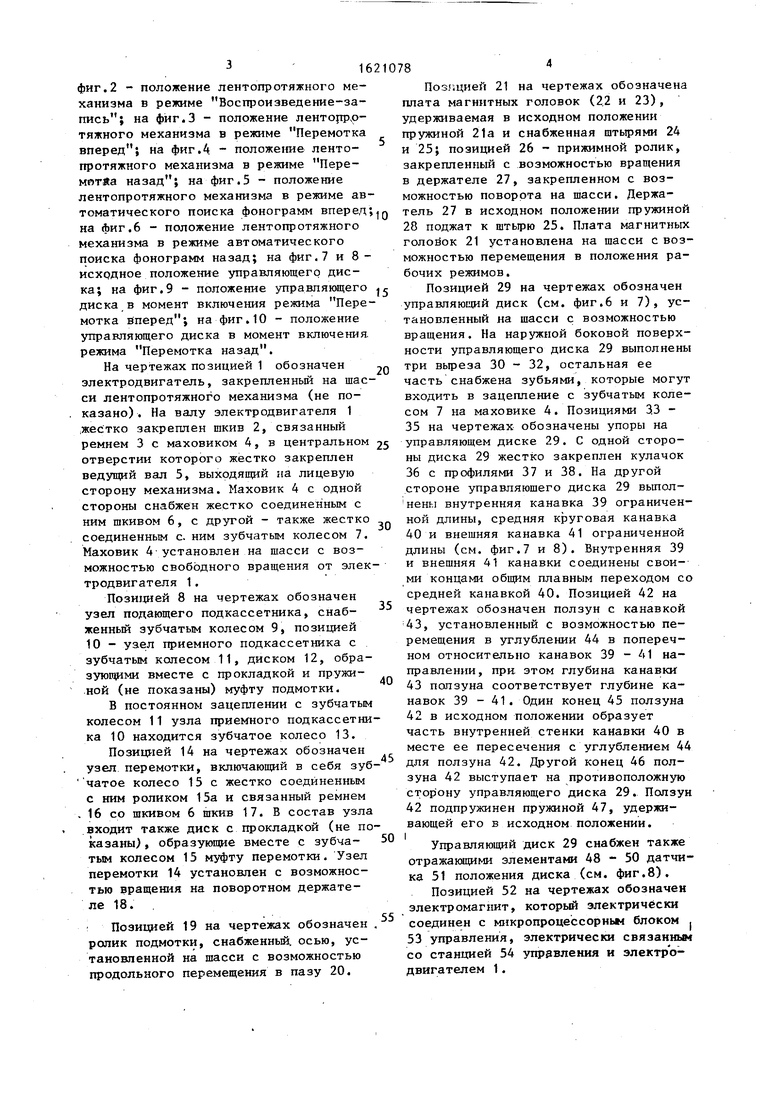
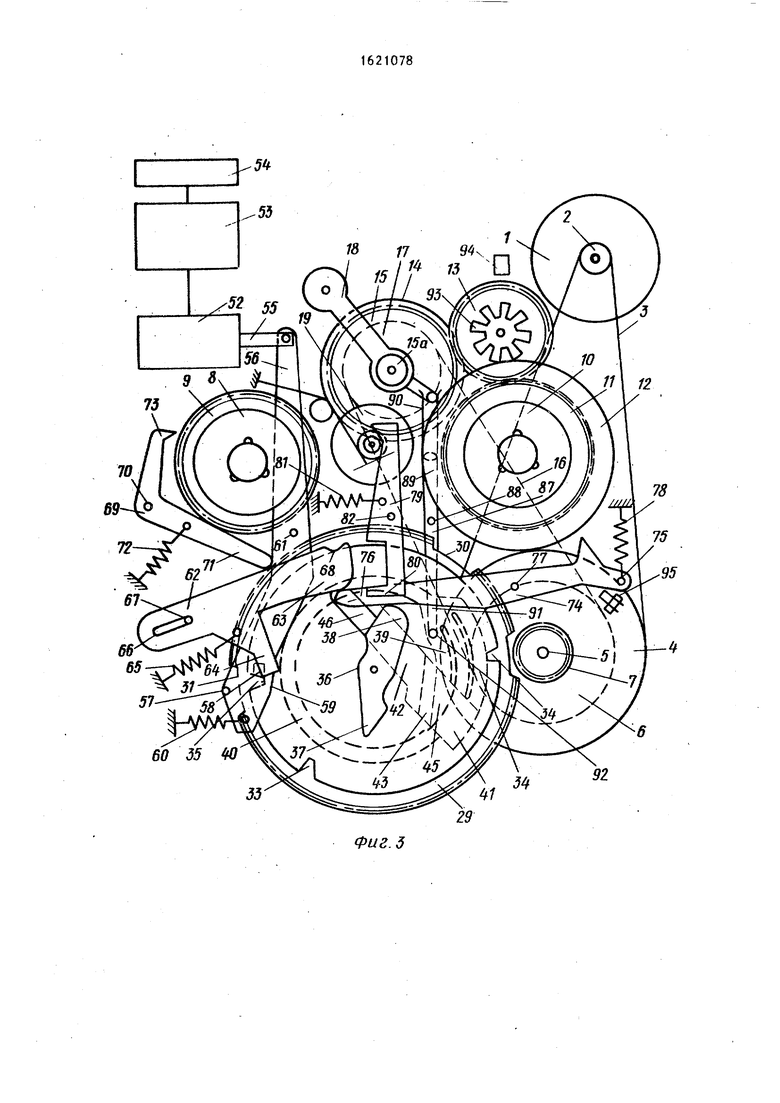
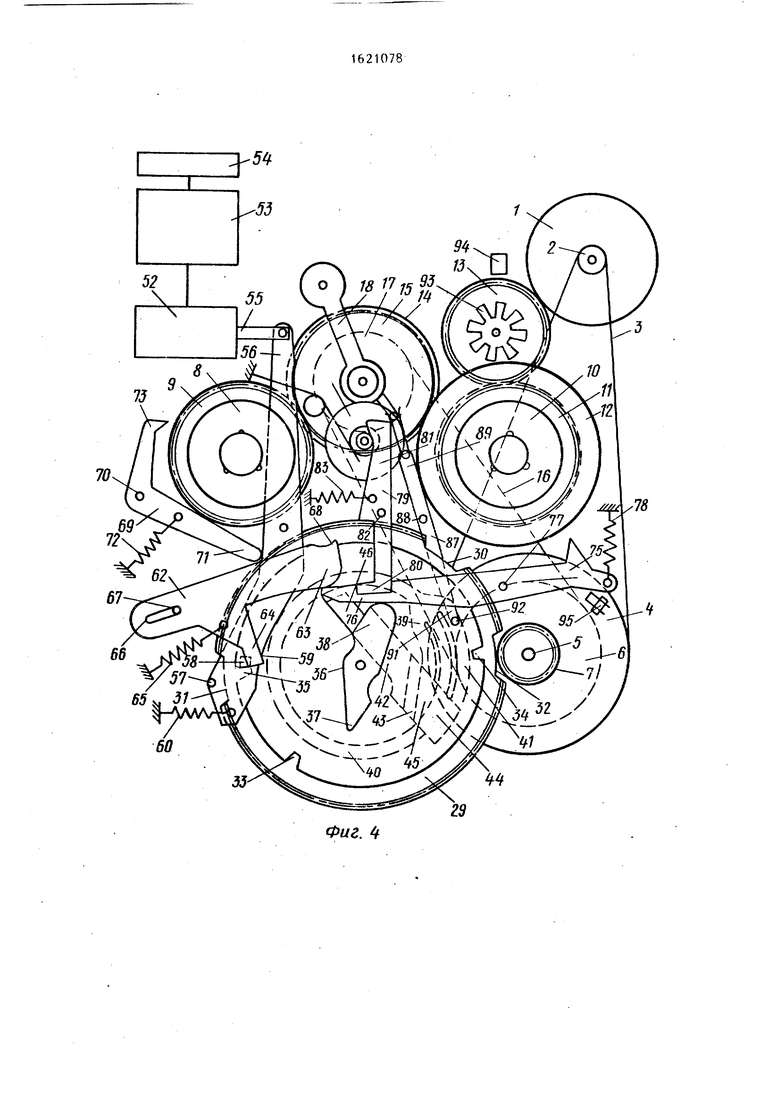
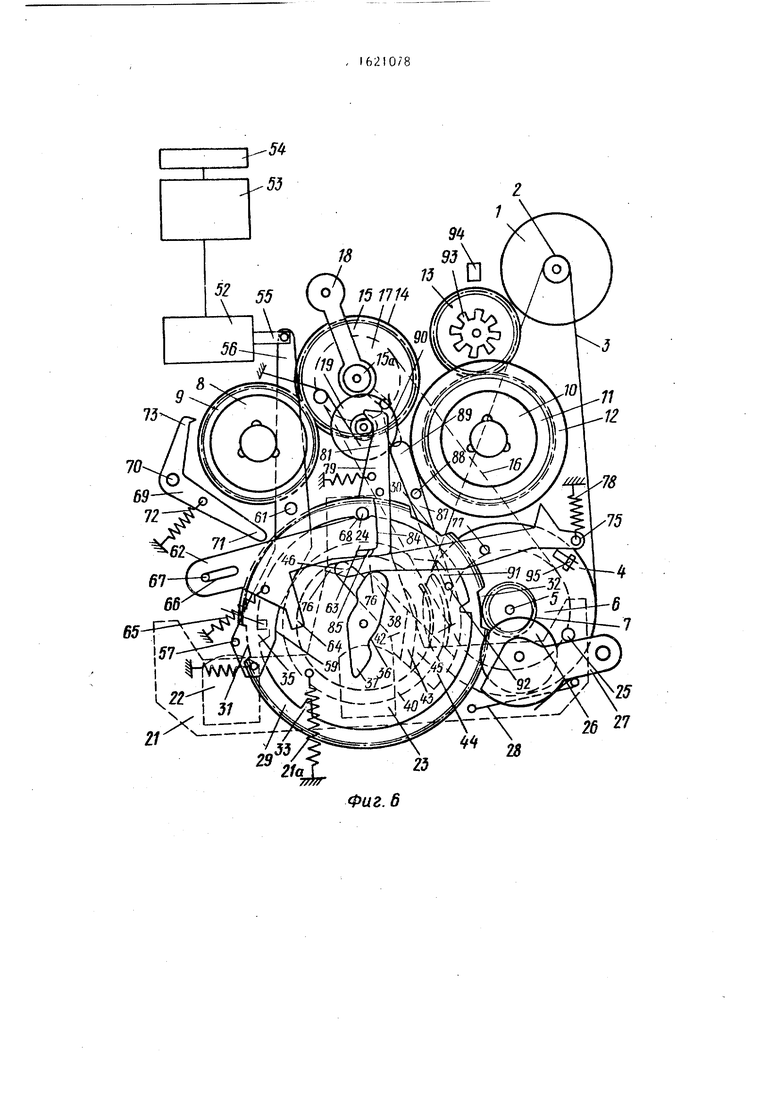
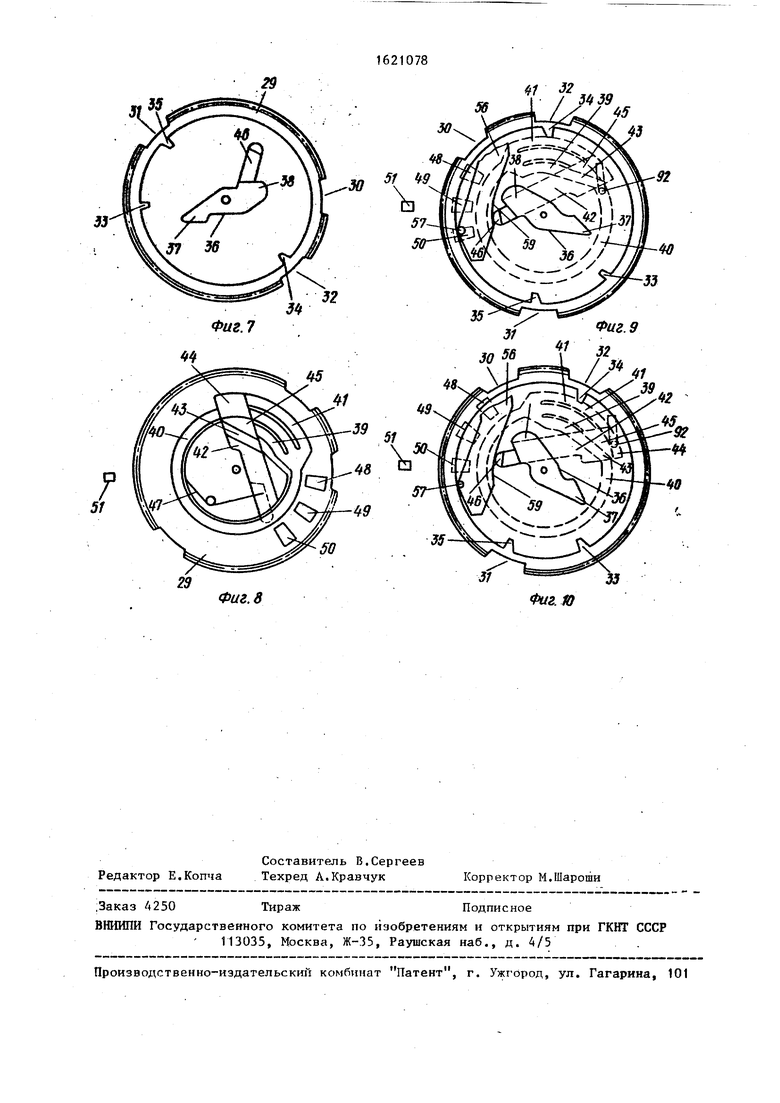
фиг.2 - положение лентопротяжного механизма в режиме Воспроизведение-запись ; на фиг.З - положение лентопротяжного механизма в режиме Перемотка вперед ; на фиг.4 - положение лентопротяжного механизма в режиме Пере- мвтйа назад ; на фиг.З - положение лентопротяжного механизма в режиме автоматического поиска фонограмм вперед на фиг.6 - положение лентопротяжного механизма в режиме автоматического поиска фонограмм назад; на фиг. 7 и 8 исхрдное положение управляющего диска; на фиг.9 - положение управляющего диска в момент включения режима Перемотка вперед ; на фиг.10 - положение управляющего диска в момент включения режима Перемотка назад.
На чертежах позицией 1 обозначен
электродвигатель, закрепленный на шасси лентопротяжного механизма (не показано) . На валу электродвигателя 1 жестко закреплен шкив 2, связанный ремнем 3 с маховиком 4, в центральном отверстии которого жестко закреплен ведущий вал 5, выходящий на лицевую сторону механизма. Маховик 4 с одной стороны снабжен жестко соединенным с ним шкивом 6, с другой - также жестко соединенным с. ним зубчатым колесом 7. Маховик 4 установлен на шасси с возможностью свободного вращения от электродвигателя 1.
Позицией 8 на чертежах обозначен узел подающего подкассетника, снабженный зубчатым колесом 9, позицией 10 - уаел приемного подкассетника с зубчатым колесом 11, диском 12, образующими вместе с прокладкой и пружиной (не показаны) муфту подмотки.
В постоянном зацеплении с зубчатым колесом 11 узла приемного подкассетника 10 находится зубчатое колесо 13.
Позицией 14 на чертежах обозначен узел перемотки, включающий в себя зубчатое колесо 15с жестко соединенным с ним роликом 15а и связанный ремнем . 16 со шкивом 6 шкив 17. В состав узла входит также диск с прокладкой (не показаны) , образующие вместе с зубча- тым колесом 15 муфту перемотки. Узел перемотки 14 установлен с возможностью вращения на поворотном держателе 18.
Позицией 19 на чертежах обозначен ролик подмотки, снабженный, осью, установленной на шасси с возможностью продольного перемещения в пазу 20.
r
0
5
0
5
0
Позицией 21 на чертежах обозначена плата магнитных головок (22 и 23), удерживаемая в исходном положении пружиной 21а и снабженная штырями 24 и 25; позицией 26 - прижимной ролик, закрепленный с возможностью вращения в держателе 27, закрепленном с возможностью поворота на шасси. Держатель 27 в исходном положении пружиной 28 поджат к штырю 25. Плата магнитных головок 21 установлена на шасси с возможностью перемещения в положения рабочих режимов.
Позицией 29 на чертежах обозначен управляющий диск (см. фиг.6 и 7), установленный на шасси с возможностью вращения. На наружной боковой поверхности управляющего диска 29 выполнены три выреза 30-32, остальная ее часть снабжена зубьями, которые могут входить в зацепление с зубчатым колесом 7 на маховике 4. Позициями 33 35на чертежах обозначены упоры на управляющем диске 29. С одной стороны диска 29 жестко закреплен кулачок
36с профилями 37 и 38. На другой стороне управляющего диска 29 выполнены внутренняя канавка 39 ограниченной длины, средняя круговая канавка 40 и внешняя канавка 41 ограниченной длины (см. фиг.7 и 8). Внутренняя 39 и внешняя 41 канавки соединены своими концами общим плавным переходом со средней канавкой 40. Позицией 42 на чертежах обозначен ползун с канавкой 43, установленный с возможностью перемещения в углублении 44 в поперечном относительно канавок 39 - 41 направлении, при. этом глубина канавки 43 ползуна соответствует глубине канавок 39 - 41. Один конец 45 ползуна 42 в исходном положении образует часть внутренней стенки канавки 40 в месте ее пересечения с углублением 44
для ползуна 42. Другой конец 46 ползуна 42 выступает на противоположную сторону управляющего диска 29. Ползун 42 подпружинен пружиной 47, удерживающей его в исходном положении.
Управляющий диск 29 снабжен также отражающими элементами 48 - 50 датчика 51 положения диска (см. фиг.8).
Позицией 52 на чертежах обозначен электромагнит, который электрически соединен с микропроцессорные блоком . 53 управления, электрически связанным со станцией 54 управления и электродвигателем 1.
0
5
516
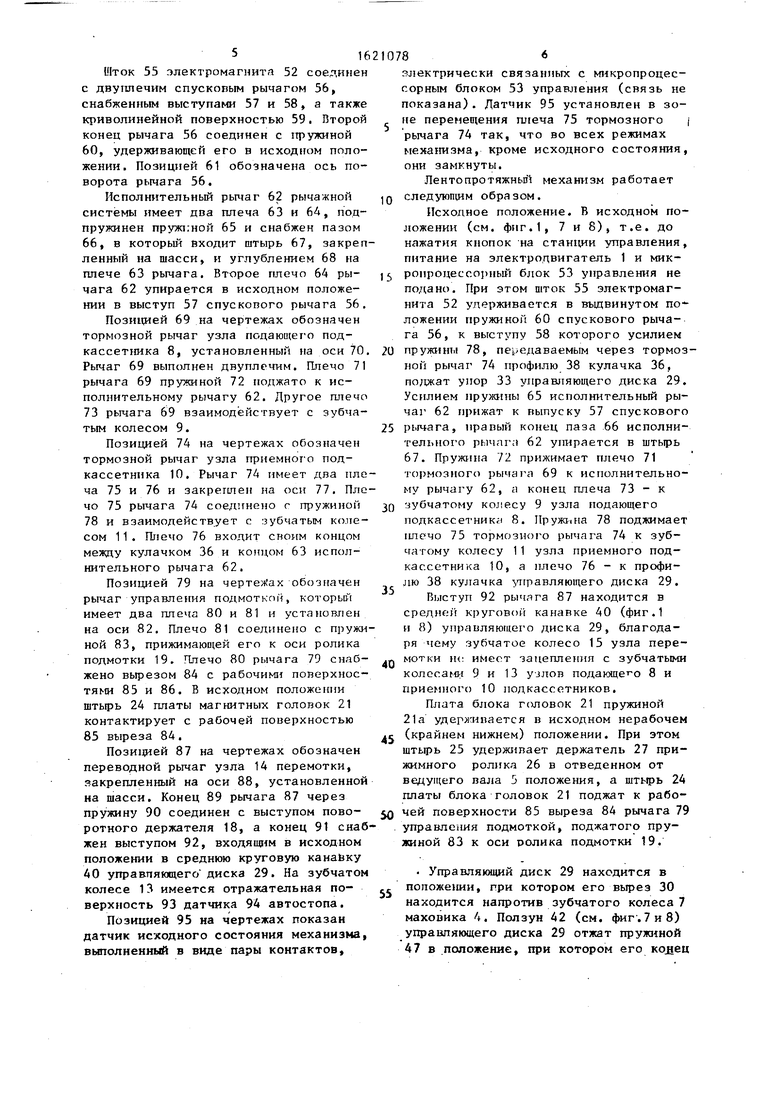
Шток 55 электромагнита 52 соединен с двуплечим спусковым рычагом 56, снабженным выступами 57 и 58, а также криволинейной поверхностью 59. Второй конец рычага 56 соединен с пружиной 60, удерживающей его в исходном положении. Позицией 61 обозначена ось поворота рычага 56.
Исполнительный рычаг 62 рычажной системы имеет два плеча 63 и 64, подпружинен пружтгной 65 и снабжен пазом 66, в который входит штырь 67, закрепленный на шасси, и углублением 68 на плече 63 рычага. Второе плечо 64 рычага 62 упирается в исходном положении в выступ 57 спускового рычага 56.
Позицией 69 на чертежах обозначен тормозной рычаг узла подающего под- кассетника 8, установленный на оси 70 Рычаг 69 выполнен двуплечим. Плечо 71 рычага 69 пружиной 72 поджато к исполнительному рычагу 62. Другое плечо 73 рычага 69 взаимодействует с зубчатым колесом 9.
Позицией 74 на чертежах обозначен тормозной рычаг узла приемного под- кассетника 10. Рычаг 74 имеет два плеча 75 и 76 и закрегшен на оси 77. Плечо 75 рычага 74 соединено г пружиной 78 и взаимодействует с -зубчатым копе- сом 11. Плечо 76 входит своим концом между кулачком 36 и концом 63 исполнительного рычага 62.
Позицией 79 на чертежах обозначен рычаг управления подмоткой, который имеет два плеча 80 и 81 и установлен на оси 82. Плечо 81 соединено с пружиной 83, прижимающей его к оси ролика подмотки 19, Плечо 80 рычага 79 снабжено вырезом 84 с рабочими поверхностями 85 и 86. В исходном положении штырь 24 платы магнитных головок 21 контактирует с рабочей поверхностью 85 выреза 84.
Позицией 87 на чертежах обозначен переводной рычаг узла 14 перемотки, закрепленный на оси 88, установленной на шасси. Конец 89 рычага 87 через пружину 90 соединен с выступом поворотного держателя 18, а конец 91 снабжен выступом 92, входящим в исходном положении в среднюю круговую канавку 40 управляющего диска 29. На зубчатом колесе 13 имеется отражательная поверхность 93 датчика 94 автостопа.
Позицией 95 на чертежах показан датчик исходного состояния механизма, выполненный в виде пары контактов,
0
5
0
5
электрически связанных с микропроцессорным блоком 53 управления (связь не показана). Датчик 95 установлен в зоне перемещения плеча 75 тормозного | рычага 74 так, что во всех режимах механизма, кроме исходного состояния, они замкнуты.
Лентопротяжный механизм работает следующим образом.
Исходное положение. В исходном положении (см. фиг.1, 7 и 8), т.е. до нажатия кнопок на станции управления, питание на электродвигатель 1 и микропроцессорный блок 53 управления не подано. При этом шток 55 электромагнита 52 удерживается в выдвинутом по-- ложении пружиной 60 спускового рычага 56, к выступу 58 которого усилием пружины 78, передаваемым через тормозной рычаг 74 профилю 38 кулачка 36, поджат упор 33 управляющего диска 29. Усилием пружины 65 исполнительный рычаг 62 прижат к выпуску 57 спускового рычага, правый конец паза 66 исполнительного рычаг. 62 упирается в штырь 67. Пружина /2 прижимает плечо 71 тормозного рычага 69 к исполнительному рычагу 62, а конец плеча 73 - к зубчатому колесу 9 узла подающего подкассетникс( 8. Пружина 78 поджимает плечо 75 тормозного рычага 74 к зуб- чатому колегу 11 узла приемного под- кассетника 10, а плечо 76 - к профилю 38 кулачка управляющего диска 29.
Выступ 92 рычага 87 находится в средней круговой канавке 40 (фиг.1 и 8) управляющего диска 29, благодаря чему зубчатое колесо 15 узла перемотки не имеет зацепления с зубчатыми колесами 9 и 13 узлов подающего 8 и приемного 10 подкассетников.
Плата блока головок 21 пружиной 21а удерживается в исходном нерабочем (крайнем нижнем) положении. При этом штырь 25 удерживает держатель 27 прижимного ролика 26 в отведенном от ведущего вала 5 положения, а штырь 24 платы блока головок 21 поджат к рабочей поверхности 85 выреза 84 рычага 79 управления подмоткой, поджатого пружиной 83 к оси ролика подмотки 19.
0
5
0
. Управляющий диск 29 находится в положении, при котором его вырез 30 находится напротив зубчатого колеса 7 маховика 4. Ползун 42 (см. фиг.7 и 8) управляющего диска 29 отжат пружиной 47 в положение, при котором его кодец
716
45 з исходном положении образует часть внутренней стенки канавки 40.
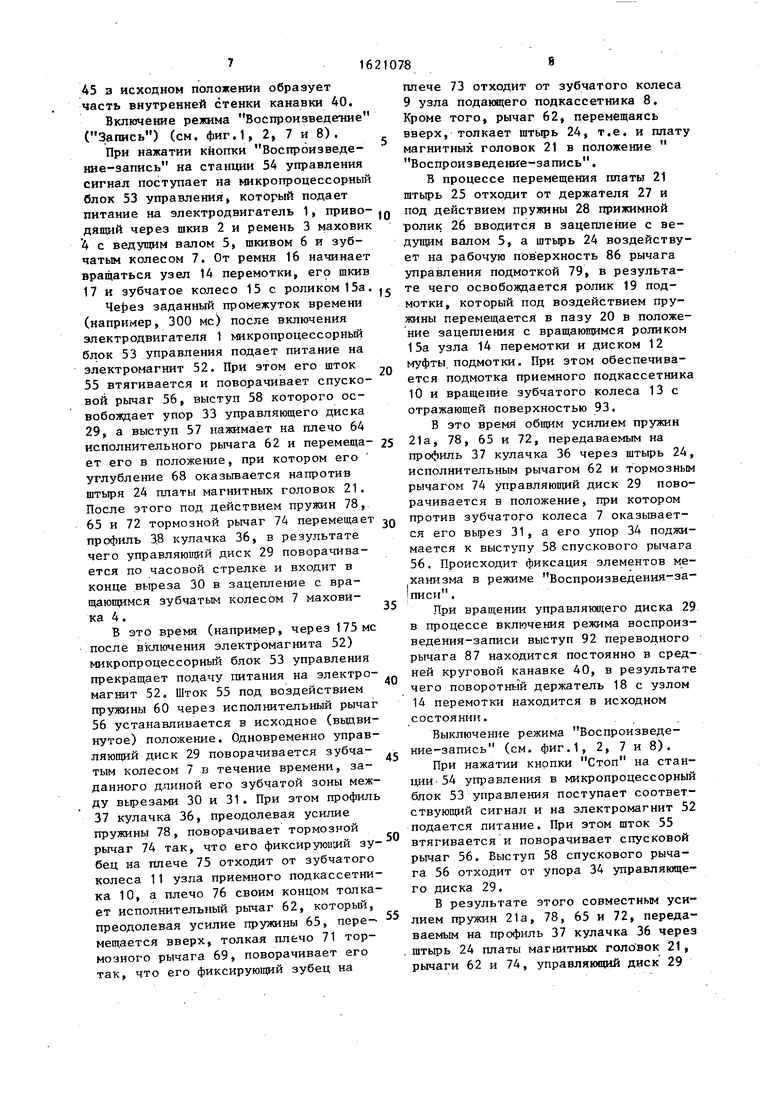
Включение режима Воспроизведение (Запись) (см. фиг.1, 2, 7 и 8).
При нажатии кнопки Воспроизведе
ние-запись на станции 54 управления сигнал поступает на микропроцессорный блок 53 управления, который подает питание на электродвигатель 1, приво- дящий через шкив 2 и ремень 3 маховик 4 с ведущим валом 5, шкивом 6 и зубчатым колесом 7. От ремня 16 начинает вращаться узел 14 перемотки, его шкив
В процессе перемещения платы 21 штырь 25 отходит от держателя 27 и под действием пружины 28 прижимной ролик 26 вводится в зацепление с ведущим валом 5, а штырь 24 воздейству ет на рабочую поверхность 86 рычага управления подмоткой 79, в результа17 и зубчатое колесо 15 с роликом 15а. те чего освобождается ролик 19 под20
Через заданный промежуток времени (например, 300 мс) после включения электродвигателя 1 микропроцессорный блок 53 управления подает питание на электромагнит 52. При этом его шток 55 втягивается и поворачивает спусковой рычаг 56, выступ 58 которого освобождает упор 33 управляющего диска 29, а выступ 57 нажимает на плечо 64 исполнительного рычага 62 и перемеща- 25 ет его в положение, при котором его углубление 68 оказывается напротив штыря 24 платы магнитных головок 21. После этого под действием пружин 78,
мотки, который под воздействием пружины перемещается в пазу 20 в положе ние зацепления с вращающимся роликом 15а узла 14 перемотки и диском 12 муфты подмотки. При этом обеспечивается подмотка приемного подкассетник 10 и вращение зубчатого колеса 13 с отражающей поверхностью 93.
В это время общим усилием пружин 21а, 78, 65 и 72, передаваемым на профиль 37 кулачка 36 через штырь 24 исполнительным рычагом 62 и тормозны рычагом 74 управляющий диск 29 пово рачивается в положение, при котором
65 и 72 тормозной рычаг 74 перемещает Q против зубчатого колеса 7 оказывает- профиль 38 кулачка 36, в результате чего управляющий диск 29 поворачивается по часовой стрелке и входит в конце выреза 30 в зацепление с вращающимся зубчатым колесом 7 маховика 4.
В это время (например, через 175мс после включения электромагнита 52) микропроцессорный блок 53 управления прекращает подачу питания на электромагнит 52. Шток 55 под воздействием пружины 60 через исполнительный рычаг 56 устанавливается в исходное (выдвинутое) положение. Одновременно управляющий диск 29 поворачивается зубчатым колесом 7 в течение времени, заданного дпиной его зубчатой зоны между вырезами 30 и 31. При этом профиль 37 кулачка 36, преодолевая усилие пружины 78, поворачивает тормозной
35
40
45
ся его вырез 31, а его упор 34 поджимается к выступу 58 спускового рычага 56. Происходит фиксация элементов механизма в режиме Воспроизведения-за- писи.
При вращении управляющего диска 29 в процессе включения режима воспроизведения-записи выступ 92 переводного рычага 87 находится постоянно в средней круговой канавке 40, в результате чего поворотный держатель 18 с узлом 14 перемотки находится в исходном состоянии.
Выключение режима Воспроизведение-запись (см. фиг.1, 2, 7 и 8).
При нажатии кнопки Стоп на станции 54 управления в микропроцессорный блок 53 управления поступает соответствующий сигнал и на электромагнит 52 подается питание. При этом шток 55
рычаг 74 так, что его фиксиругоняй зу- втягивается и поворачивает спусковой бец на плече 75 отходит от зубчатого рычаг 56. Выступ 58 спускового рыча- колеса 11 узла приемного подкассетника 10, а плечо 76 своим концом толкает исполнительный рычаг 62, который,
га 56 отходит от упора 34 управляющего диска 29.
В результате этого совместным усипреодолевая усилие пружины 65, пере- 55 лием пружин 21а, 78, 65 и 72, переда- мещается вверх, толкая плечо 71 тор- ваемым на профиль 37 кулачка 36 через мозного рычага 69, поворачивает его так, что его фиксирующий зубец на
штырь 24 платы магнитных головок 21, рычаги 62 и 74, управляющий диск 29
8
плече 73 отходит от зубчатого колеса 9 узла подающего подкассетника 8. Кроме того, рычаг 62, перемещаясь вверх, толкает штырь 24, т.е. и плату магнитных головок 21 в положение Воспроизведение-запись.
В процессе перемещения платы 21 штырь 25 отходит от держателя 27 и под действием пружины 28 прижимной ролик 26 вводится в зацепление с ведущим валом 5, а штырь 24 воздействует на рабочую поверхность 86 рычага управления подмоткой 79, в результате чего освобождается ролик 19 под0
5
мотки, который под воздействием пружины перемещается в пазу 20 в положение зацепления с вращающимся роликом 15а узла 14 перемотки и диском 12 муфты подмотки. При этом обеспечивается подмотка приемного подкассетника 10 и вращение зубчатого колеса 13 с отражающей поверхностью 93.
В это время общим усилием пружин 21а, 78, 65 и 72, передаваемым на профиль 37 кулачка 36 через штырь 24, исполнительным рычагом 62 и тормозным рычагом 74 управляющий диск 29 поворачивается в положение, при котором
против зубчатого колеса 7 оказывает-
ся его вырез 31, а его упор 34 поджимается к выступу 58 спускового рычага 56. Происходит фиксация элементов механизма в режиме Воспроизведения-за- писи.
При вращении управляющего диска 29 в процессе включения режима воспроизведения-записи выступ 92 переводного рычага 87 находится постоянно в средней круговой канавке 40, в результате чего поворотный держатель 18 с узлом 14 перемотки находится в исходном состоянии.
Выключение режима Воспроизведение-запись (см. фиг.1, 2, 7 и 8).
При нажатии кнопки Стоп на станции 54 управления в микропроцессорный блок 53 управления поступает соответствующий сигнал и на электромагнит 52 подается питание. При этом шток 55
втягивается и поворачивает спусковой рычаг 56. Выступ 58 спускового рыча-
га 56 отходит от упора 34 управляющего диска 29.
В результате этого совместным усилием пружин 21а, 78, 65 и 72, переда- ваемым на профиль 37 кулачка 36 через
лием пружин 21а, 78, 65 и 72, переда- ваемым на профиль 37 кулачка 36 через
штырь 24 платы магнитных головок 21, рычаги 62 и 74, управляющий диск 29
1
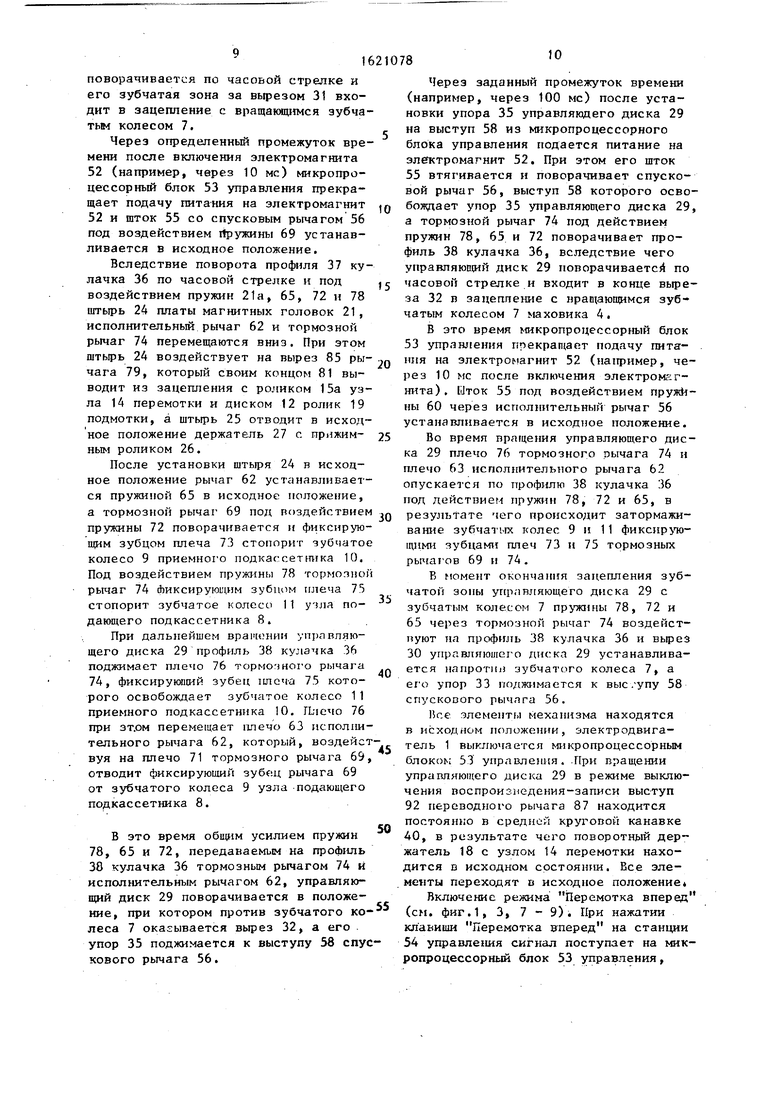
поворачивается по часовой стрелке и его зубчатая зона за вырезом 31 входит в зацепление с вращающимся зубчатым колесом 7.
Через определенный промежуток времени после включения электромагнита 52 (например, через 10 мс) микропроцессорный блок 53 управления прекращает подачу питания на электромагнит 52 и шток 55 со спусковым рычагом 56 под воздействием пружины 69 устанавливается в исходное положение.
Вследствие поворота профиля 37 кулачка 36 по часовой стрелке и под воздействием пружин 21 а, 65, 72 и 78 штырь 24 платы магнитных головок 21, исполнительный рычаг 62 и тормозной рычаг 74 перемещаются вниз. При этом
штырь 24 воздействует на вырез 85 ры- чага 79, который своим концом 81 выводит из зацепления с роликом 15а узла 14 перемотки и диском 12 ролик 19 подмотки, а штырь 25 отводит в исходное положение держатель 27 с прижимным роликом 26.
После установки штыря 24 в исходное положение рычаг 62 устанавливается пружиной 65 в исходное положение, а тормозной рычаг 69 под воздействием пружины 72 поворачивается и фиксирующим зубцом плеча 73 стопорит зубчатое колесо 9 приемного подкас-сетника 10. Под воздействием пружины 78 тормозной рычаг 74 Аиксирующнм зубном плеча 75 стопорит зубчатое колесо I1 учла подающего подкассетника 8.
При дальнейшем вращении управляющего диска 29 профиль 38 кулачка 36 поджимает плечо 76 тормочного рычага 74, фиксирующий зубец плеча 75 которого освобождает зубчатое колесо 11 приемного подкассетника 10. Плечо 76 при эт.ом перемещает плечо 63 исполнительного рычага 62, который, воздействуя на плечо 71 тормозного рычага 69, отводит фиксирующий зубец рычага 69 от зубчатого колеса 9 узла подающего подкассетника 8.
В это время общим усилием пружин 78, 65 и 72, передаваемым на профиль 38 кулачка 36 тормозным рычагом 74 и исполнительным рычагом 62, управляющий диск 29 поворачивается в положе
ние, при котором против зубчатого колеса 7 окасывается вырез 32, а его упор 35 поджимается к выступу 58 спускового рычага 56.
10
0
5
0
5
0
i
0
5
0
Через заданный промежуток времени (например, через 100 мс) после установки упора 35 управляюдего диска 29 на выступ 58 из микропроцессорного блока управления подается питание на электромагнит 52. При этом его шток 55 втягивается и поворачивает спусковой рычаг 56, выступ 58 которого освобождает упор 35 управляющего диска 29, а тормозной рычаг 74 под действием пружин 78, 65 и 72 поворачивает профиль 38 кулачка 36, вследствие чего управляющий диск 29 поворачиваете по часовой стрелке и входит в конце выреза 32 в зацепление с вращающимся зубчатым колесом 7 маховика 4.
В это время микропроцессорный блок
53управления прекращает подачу питания на электромагнит 52 (например, через 10 мс после включения электромагнита) . Ыток 55 под воздействием пружины 60 через исполнительный рычаг 56 устанавливается в исходное положение.
Во время вращения управляющего диска 29 плечо 76 тормозного пычага 74 и плечо 63 исполнительного рычага 62 опускается по профилю 38 кулачка 36 под действием пружин 78, 72 и 65, в результате чего происходит затормаживание зубчатых колес 9 и 11 фиксирующими зубцами плеч 73 и 75 тормозных рычагов 69 и 74.
В момент окончания зацепления зубчатой зоны управляющего диска 29 с зубчатым колесом 7 пружины 78, 72 и 65 через тормозной рычаг 74 воздейст- нуют на профиль 38 кулачка 36 и вырез 30 управляющего диска 29 устанавливается напротшз зубчатого колеса 7, а его упор 33 поджимается к вые/упу 58 спускооого рычага 56.
Все -элементы механизма находятся в исходном положении, электродвигатель 1 выключается микропроцессорным блоком 53 управления. При вращении управляющего диска 29 в режиме выключения воспроигиедения-записи выступ 92 переводного рычага 87 находится постоянно в средний круговой канавке АО, в результате чего поворотный держатель 18 с узлом 14 перемотки находится в исходном состоянии. Все элементы переходят в исходное положение
Включение режима Перемотка вперед (си. фиг.1, 3, 7-9). При нажатии клавиши Перемотка вперед на станции
54управления сигнал поступает на микропроцессорный блок 53 управления,
11
который, в свою очередь, подает питание .на электродвигатель 1.
Электродвигатель 1 приводит во-вращение маховик 4 с ведущим валом 5, шкивом 6 и зубчатым колесом 7. От шкива 6 через ремень 16 начинает вращаться узел 14 перемотки, его шкив 17 и зубчатое колесо 15 с ропиком 15а.
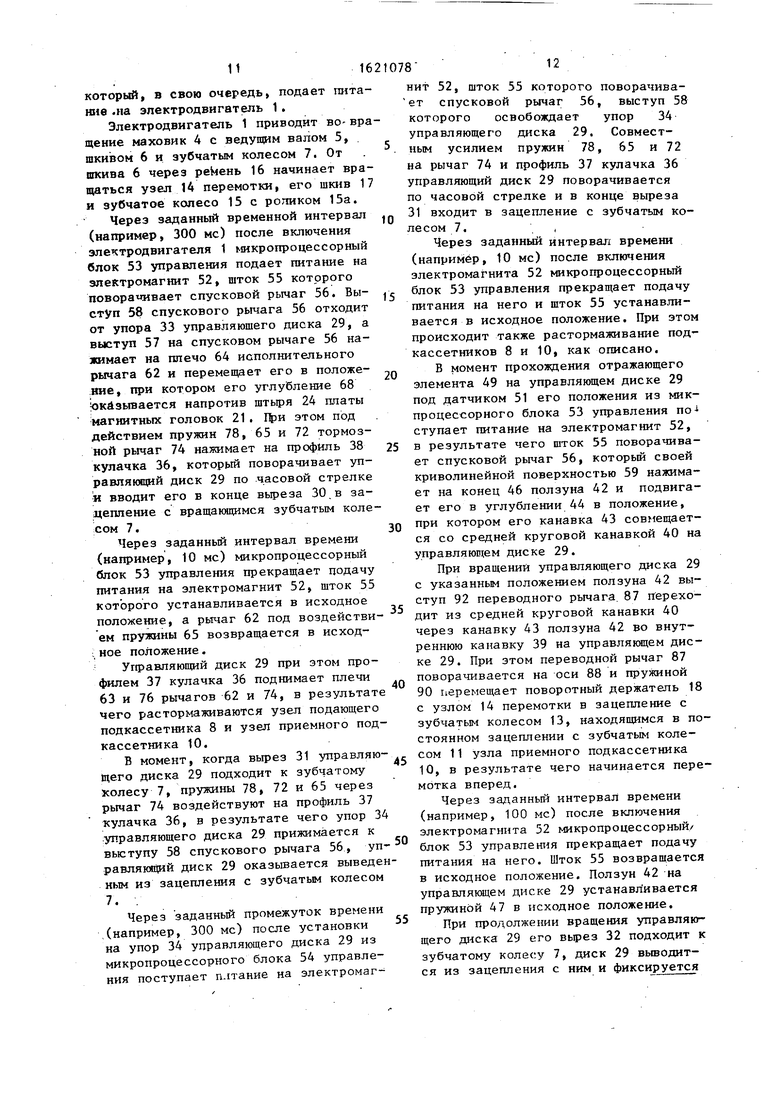
Через заданный временной интервал (например, 300 мс) после включения электродвигателя 1 микропроцессорный блок 53 управления подает питание на электромагнит 52, шток 55 которого поворачивает спусковой рычаг 56. Выступ 58 спускового рычага 56 отходит от упора 33 управляющего диска 29, а выступ 57 на спусковом рычаге 56 нажимает на плечо 64 исполнительного рычага 62 и перемещает его в положение, при котором его углубление 68 Оказывается напротив штыря 24 платы магнитных головок 21. При этом под действием пружин 78, 65 и 72 тормозной рычаг 74 нажимает на профиль 38 кулачка 36, который поворачивает управляющий диск 29 по часовой стрелке и вводит его в конце выреза 30 в зацепление с вращающимся зубчатым колесом 7.
Через заданный интервал времени (например, 10 мс) микропроцессорный блок 53 управления прекращает подачу питания на электромагнит 52, шток 55 которого устанавливается в исходное
10
15
1621078 12
нит 52, шток 55 которого поворачива ет спусковой рычаг 56, выступ которого освобождает упор 34 управляющего диска 29. Совместным усилием пружин 78, 65 и 7 на рычаг 74 и профиль 37 кулачка 36 управляющий диск 29 поворачивается по часовой стрелке и в конце выреза 31 входит в зацепление с зубчатым к лесом 7.
Через заданный интервал времени (например, 10 мс) после включения электромагнита 52 микропроцессорный блок 53 управления прекращает подач питания на него и шток 55 устанавли вается в исходное положение. При эт происходит также растормаживание по кассетников 8 и 10, как описано.
В момент прохождения отражающего элемента 49 на управляющем диске 29 под датчиком 51 его положения из ми процессорного блока 53 управления п ступает питание на электромагнит 52 в результате чего шток 55 поворачив ет спусковой рычаг 56, который свое криволинейной поверхностью 59 нажим ет на конец 46 ползуна 42 и подвиг ет его в углублении 44 в положение, при котором его канавка 43 совмещае ся со средней круговой канавкой 40 управляющем диске 29.
При вращении управляющего диска с указанным положением ползуна 42 в ступ 92 переводного рычага 87 перех
20
25
30
положение, а рычаг 62 под воздействи- дит из средней круговой канавки 40
ем пружины 65 возвращается в исходное положение.
Управляющий диск 29 при этом профилем 37 кулачка 36 поднимает плечи 63 и 76 рычагов 62 и 74, в результате чего растормаживаются узел подающего подкассетника 8 и узел приемного под- кассетника 10.
В момент, когда вырез 31 управляющего диска 29 подходит к зубчатому колесу 7, пружины 78, 72 и 65 через рычаг 74 воздействуют на профиль 37 кулачка 36, в результате чего упор 34 управляющего диска 29 прижимается к выступу 58 спускового рычага 56, уп равляюший диск 29 оказывается выведенным из зацепления с зубчатым колесом 7.
Через заданный промежуток времени (например, 300 мс) после установки на упор 34 управляющего диска 29 из микропроцессорного блока 54 управления поступает плтание на электромаг
10
15
21078 12
нит 52, шток 55 которого поворачива- ет спусковой рычаг 56, выступ 58 которого освобождает упор 34 управляющего диска 29. Совместным усилием пружин 78, 65 и 72 на рычаг 74 и профиль 37 кулачка 36 управляющий диск 29 поворачивается по часовой стрелке и в конце выреза 31 входит в зацепление с зубчатым колесом 7.
Через заданный интервал времени (например, 10 мс) после включения электромагнита 52 микропроцессорный блок 53 управления прекращает подачу питания на него и шток 55 устанавливается в исходное положение. При этом происходит также растормаживание под- кассетников 8 и 10, как описано.
В момент прохождения отражающего элемента 49 на управляющем диске 29 под датчиком 51 его положения из мик- процессорного блока 53 управления по ступает питание на электромагнит 52, в результате чего шток 55 поворачивает спусковой рычаг 56, который своей криволинейной поверхностью 59 нажимает на конец 46 ползуна 42 и подвигает его в углублении 44 в положение, при котором его канавка 43 совмещается со средней круговой канавкой 40 на управляющем диске 29.
При вращении управляющего диска 29 с указанным положением ползуна 42 выступ 92 переводного рычага 87 перехо20
25
30
40
45
50
55
через канавку 43 ползуна 42 во внутреннюю канавку 39 на управляющем диске 29. При этом переводной рычаг 87 поворачивается на оси 88 и пружиной 90 перемещает поворотный держатель 18 с узлом 14 перемотки в зацепление с зубчатым колесом 13, находящимся в постоянном зацеплении с зубчатым колесом 11 узла приемного подкассетника 10, в результате чего начинается перемотка вперед.
Через заданный интервал времени (например, 100 мс) после включения электромагнита 52 микропроцессорный/ блок 53 управления прекращает подачу питания на него. Шток 55 возвращается в исходное положение. Ползун 42 на управляющем диске 29 устанавливается пружиной 47 в исходное положение.
При продолжении вращения управляющего диска 29 его вырез 32 подходит к зубчатому колесу 7, диск 29 выводится из зацепления с ним и фиксируется
упором 35, поджимаемым к выступу 58 спускового рычага 56, как описано.
Выключение режима Перемотка вперед (см. фиг.1, 3, 7 и 8). При нажатии кнопки Стоп на станции 54 управления сигнал поступает в микропроцессорный блок 53 управления, который подает питание на электромагнит 52. Шток 55 поворачивает спусковой рычаг 56, выступ 58 которого освобождает упор 35 управляющего диска 29.
Пружины 78, 65 и 72 через рычаг 74 воздействуют на профиль 38 кулачка 36, в результате чего управляющий диск 29 поворачивается и входит в конец выреза 32 в зацепление с зубчатым колесом 7. При этом профиль 38 кулачка 36 поворачивается по часовой стрелке и тормозной рычаг 74 своим зубцом затормаживает узел приемного подкассетника 10, а исполнительный рычаг 62 отходит от тормозного рычага 69, который затормаживает узел подающего подкассетника 8.
Одновременно при повороте управляющего диска 29 выступ 92 переводного рычага 87 из внутренней канавки 39 переходит в среднюю круговую канавку 40 и, таким образом, пружиной 90 выводит узел 14 перемотки из зацепления с зубчатым колесом 13.
Через заданный интервал времени после включения электромагнита (например, 10 мс) микропроцессорный блок управления прекращает подачу питания на электромагнит 52. Мток 55 под воздействием пружины 60 через исполнительный рычаг 56 устанавливается в исходное положение.
При вращении управляющего диска 29 его вырез 30 подходит к зубчатому колесу 7 и диск 29 выводится из зацепления с ним в результате совместного действия пружин 78, 65 и 72 через ры- чаг 74 на профиль 38 кулачка 36, а упор 33 прижимается к выступу 58 спускового рычага 56. Все элементы находятся в исходном положении.
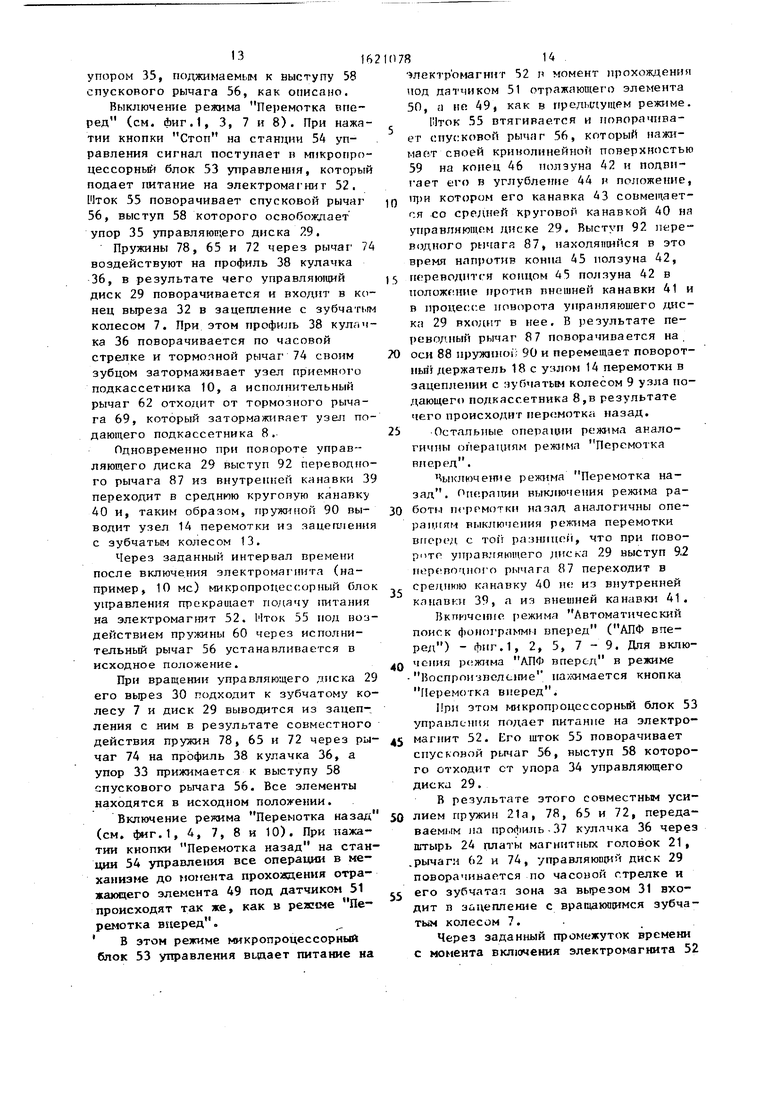
Включение режима Перемотка назад (см. фиг.1, 4, 7, 8 и 10). При нажатии кнопки Перемотка назад на станции 54 управления все операции в механизме до момента прохождения отражающего элемента 49 под датчиком 51 происходят так же, как в релине Перемотка вперед.
В этом режиме микропроцессорный блок 53 управления видает питание на
0
5
5
0
электромагнит 2 л момент прохождения под датчиком 51 отражающего элемента 50, ) не 49, как в предыдущем режиме.
Шток 55 втягивается и поворачивает спусковой рычаг 56, который нажимает своей криволинейной поверхностью 59 на конец 46 ползуна 42 и подвигает его в углубление 44 л положение, при котором его канавка 43 совмещается со средней круговой канавкой 40 на управляющем диске 29. Выступ 92 переводного рычага 87, находящийся в это время напротив конна 45 ползуна 42, 5 переводится концом 45 ползуна 42 в положение против внешней канавки 41 и в процессе поворота управляющего диска 29 входит в нее. В результате переводный рычаг 87 поворачивается на 0 оси 88 иружшю 90 и перемещает поворотный держатель 18 с узлом 14 перемотки в зацеплении с зубчатым колесом 9 узла подающего подкассетника 8,в результате чего происходит перемотка назад.
Остальные операции режима аналогичны операциям режима Перемотка вперед.
выключение режима Перемотка назад. Операции выключения режима работы перемолки назад аналогичны операциям выключения режима перемотки вперед с той разницей, что при пово- РОТР управляющего диска 29 выступ 9.2 переводного рычага 87 перб .ходит в среднюю канавку 40 не из внутренней канавки 39, а из внешней канавки 41.
Включение режима Автоматический поиск фонограммн вперед (АПФ вперед) - Лнг.1, 2, 5, 7-9. Для включения режима АПФ вперед в режиме Воспроизведение1 нажимается кнопка Перемотка вперед.
При этом микропроцессорный блок 53 управления подает питание на электромагнит 52. Его шток 55 поворачивает спусьоной рычаг 56, ныступ 58 которого отходит ст упора 34 управляющего диска 29.
В результате этого совместным усилием пружин 21а, 78, 65 и 72, передаваемым на профиль-37 куллчка 36 через штырь 24 платы магнитных головок 21, .рычаги 62 и 74, управляющий диск 29 поворачивается по часовой стрелке и его зубчатал зона за вырезом 31 входит в зацепление с вращающимся зубчатым колесом 7. .
Через заданный промежуток времени с момента включения электромагнита 52
0
5
0
(например, 10 мс) микропроцессорный блок 53 управления прекращает подачу питания на электромагнит 52, и штрк 55 со спусковым рычагом 56 пружиной 60 возвращается в исходное положение.
Вследствие поворота профиля 37 кулачка 36 по часовой стрелке и под воздействием пружин 21 а, 65, 72 и 78 штырь 24 платы магнитных головок 21, исполнительный рычаг 62 и тормозной рычаг 74 перемещаются вниз. При этом щтырь 24 воздействует на вырез 85 рычага 79, который своим концом 81 выводит из зацепления с роликом 15а узла 14 перемотки и диском 12 ролик 19 подмотки, а штырь 25 отводит в исходное положение держатель 27 с прижимным роликом 26.
После установки штыря 24 в исходное положение рычаг 62 устанавливается пружиной 65 в исходное положение, а тормозной рычаг 69 под воздействием пружины 72 поворачивается и фиксирующим зубцом плеча 73 стопорит зубчатое колесо 9 приемного подкассетника 10. Под воздействием пружины 78 тормозной рычаг 74 фиксирующим зубцом плеча 75 стопорит зубчатое колесо 9.
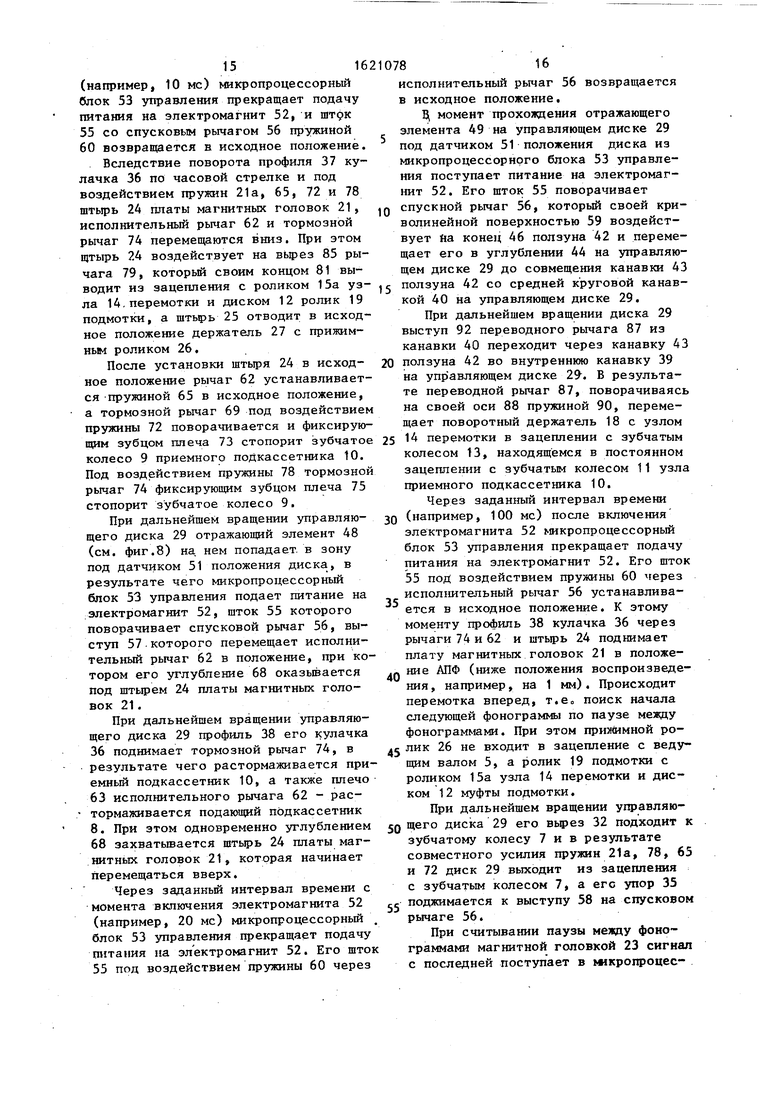
При дальнейшем вращении управляющего диска 29 отражающий элемент 48 (см. фиг.8) на нем попадает в зону под датчиком 51 положения диска, в результате чего микропроцессорный блок 53 управления подает питание на электромагнит 52, шток 55 которого поворачивает спусковой рычаг 56, выступ 57 которого перемещает исполнительный рычаг 62 в положение, при котором его углубление 68 оказывается под штырем 24 платы магнитных головок 21.
При дальнейшем вращении управляющего диска 29 профиль 38 его кулачка 36 поднимает тормозной рычаг 74, в результате чего растормаживается приемный подкассетнкк 10, а также плечо 63 исполнительного рычага 62 - растормаживается подающий подкассетник 8. При этом одновременно углублением 68 захватывается штырь 24 платы магнитных головок 21, которая начинает перемещаться вверх.
Через заданный интервал времени с момента включения электромагнита 52 (например, 20 мс) микропроцессорный . блок 53 управления прекращает подачу питания на электромагнит 52. Его шток 55 под воздействием пружины 60 через
0
5
0
5
0
5
0
5
исполнительный рычаг 56 возвращается в исходное положение.
Д момент прохождения отражающего элемента 49 на управляющем диске 29 под датчиком 51 положения риска из микропроцессорного блока 53 управления поступает питание на электромагнит 52. Его шток 55 поворачивает спускной рычаг 56, который своей криволинейной поверхностью 59 воздействует на конец 46 ползуна 42 и перемещает его в углублении 44 на управляющем диске 29 до совмещения канавки 43 ползуна 42 со средней круговой канавкой 40 на управляющем диске 29.
При дальнейшем вращении диска 29 выступ 92 переводного рычага 87 из канавки 40 переходит через канавку 43 ползуна 42 во внутреннюю канавку 39 на управляющем диске 29л В результате переводной рычаг 87, поворачиваясь на своей оси 88 пружиной 90, перемещает поворотный держатель 18 с узлом 14 перемотки в зацеплении с зубчатым колесом 13, находящемся в постоянном зацеплении с зубчатым колесом 11 узла приемного подкассетника 10.
Через заданный интервал времени (например, 100 мс) после включения электромагнита 52 микропроцессорный блок 53 управления прекращает подачу питания на электромагнит 52. Его шток 55 под воздействием пружины 60 через исполнительный рычаг 56 устанавливается в исходное положение. К этому моменту профиль 38 кулачка 36 через рычаги 74 и 62 и штырь 24 поднимает плату магнитных головок 21 в положение АПФ (ниже положения воспроизведения , например, на 1 мм). Происходит перемотка вперед, т.е„ поиск начала следующей фонограммы по паузе между фонограммами. При этом прижимной ролик 26 не входит в зацепление с ведущим валом 5, а ролик 19 подмотки с роликом 15а узла 14 перемотки и диском 12 муфты подмотки.
При дальнейшем вращении управляющего диска 29 его вырез 32 подходит к зубчатому колесу 7 и в результате совместного усилия пружин 21 а, 78, 65 и 72 диск 29 выходит из зацепления с зубчатым колесом 7, а его упор 35 поджимается к выступу 58 на спусковом рычаге 56.
При считывании паузы между фонограммами магнитной головкой 23 сигнал с последней поступает в микропроцес17
сорный блок 53 управления, который подает питание на электромагнит 52. Его шток 55 поворачивает спусковой рычаг 56, выступ 58 которого отходит от упора 35 управляющего диска 29. Совместным усилием пружин 21а, 78, 65 и 72 через рычаги 74, 62 и штырь 24 на профиль 38 кулачка 36 управляющий диск 29 вводится в зацепление с зубчатым колесом 7 в конце выреза 32.
Через заданный интервал времени с момента включения электромагнита 52 (например, 10 мс) микропроцессорный блок 53 управления прекращает подачу питания на электромагнит 52. Его шток 55 под воздействием пружины 60 через спусковой рычаг 56 возвращается в исходное положение.
При повороте управляющего диска 29 профиль 38 кулачка 36 освобождает подпружиненную плату магнитных головок 21, которая возвращается в исходное положение. При этом плечо 76 тормозного рычага 74 и плечо 63 исполнительного рычага 62 опускаются по профилю 38 кулачка 36 под действием пружин 78, 65 и 72 и 21а, в результате чего обеспечивается затормаживание узлов приемного 10 и подающего 8 под- кассетников и возврат рычага 62 в исходное положение.
Одновременно при повороте управляющего диска 29 выступ 92 переводного рычага 87 из внутренней канавки 39 переходит в среднюю круговую канавку 40 и, таким образом, пружиной 90 выводит узел 14 перемотки из зацепления с зубчатым колесом 13.
При дальнейшем вращении вырез 30 подходит к зубчатому колесу 7, в результате чего совместным усилием пружин 78, 65 и 72 на профиль 38 кулачка 36 через рычаг 74 управляющий диск
29 выводится из зацепления с зубчатым ., лами либо приемного, либо подающего
колесом 7, а упор 33 поджимается к выступу 58 спускового рычага 56. Все элементы находятся в исходном положении.
Через заданный промежуток времени после возвращения в исходное положение (например, 100 мс) микропроцессорный блок 53 управления подает питание на электромагнит 52 и выполняется полный цикл операций по включению режима воспроизведения.
Включение режима Автоматический поиск фонограмм назад (АПФ назад) - Фиг.1, 2, 4, 6, 7, 8, 10. При нажатии
SO
55
подкассетников, узел перемотки, уста новленный с возможностью перевода в положение передачи кинематического воздействия с узла перемотки на узел подающего подкассетника, ролик подмо ки, установленный с возможностью перемещения в положения рабочих режимо подпружиненную плату магнитных головок, узел прижимного ролика, установ ленный с возможностью подвода к веду щему валу и отвода от него, управляю щий диск с зубьями и вырезом на его внешней боковой поверхности, взаимодействующими с зубчатым колесом на
10
2107818
кнопки Перемотка назад при включенном режиме Воспроизведение происходит включение режима АПФ назад.
Включение происходит аналогично включению режима АПФ вперед с той разницей, что перемотка осуществляется в обратном направлении.
Работа автостопа (см. фиг. 2-6). В случае остановки зубчатого колеса 13 с отражательными поверхностями 93 в любом режиме работы механизма эта остановка считывается датчиком 94 автостопа, при этом в микропроцессорный блок 53 управления подается сигнал,а далее цикл совпадает с циклом работы при включении любого из описанных режимов .
Таким образом, наличие в предла- гаемом лентопротяжном механизме управляющего диска и исполнительного рычага, особенности выполнения спускового рычага, их связи между собой и с известными составными частями механизма позволяют выполнять функции ускоренных перемоток без второго электродвигателя и, следовательно, значительно уменьшить трудоемкость и стоимость его итготовления, существенно уменьшить вес мечанизма в целом.
15
20
25
30
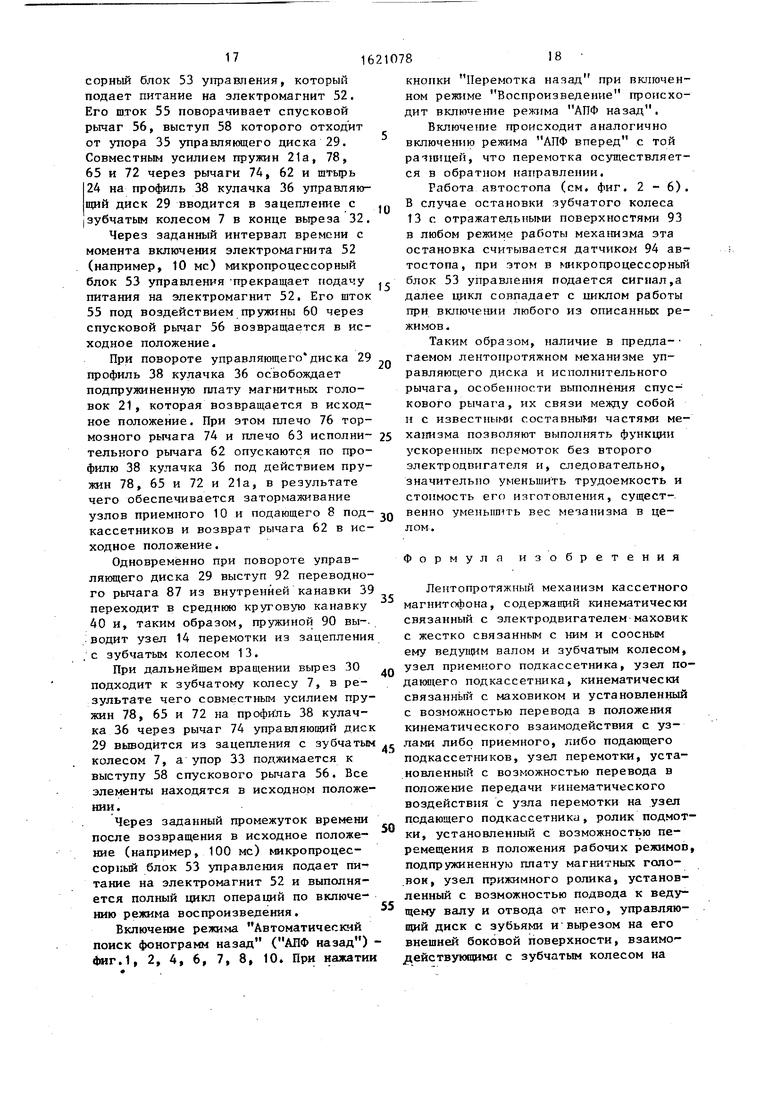
Формула изобретения
Лентопротяжный механизм кассетного магнитофона, содержащий кинематически связанный с электродвигателем маховик с жестко связанным с ним и соосным ему ведущим валом и зубчатым колесом, узел приемного подкассетника, узел подающего подкассетника, кинематически связанный с маховиком и установленный с возможностью перевода в положения кинематического взаимодействия с уз-
O
5
подкассетников, узел перемотки, установленный с возможностью перевода в положение передачи кинематического воздействия с узла перемотки на узел подающего подкассетника, ролик подмотки, установленный с возможностью перемещения в положения рабочих режимов, подпружиненную плату магнитных головок, узел прижимного ролика, установленный с возможностью подвода к ведущему валу и отвода от него, управляющий диск с зубьями и вырезом на его внешней боковой поверхности, взаимодействующими с зубчатым колесом на
маховике, тремя упорами и кулачком с профилем для перемещения платы магнитных головок в положение записи-воспроизведения и рычажную систему для растормаживания и затормаживания узлов подкассетников, спуска и остановки управляющего диска, включающую в себя взаимодействующий с упорами управляющего диска спусковой рычаг, соединенный с электромагнитом, электрически связанным с микропроцессорным блоком управления, электрически соединенным со станцией управления, отличающийся тем, что, с целью упрощения, уменьшения габаритов и веса, узел перемотки снабжен переводным рычагом, на внешней боковой поверхности управляющего диска выполнены два дополнительных выреза, кулачок имеет отдельный профиль для режима поиска фонограмм, на стороне управляющего диска, противоположной стороне, где расположены кулачок и упоры, выполнены три концентричных канавки для конца переводного рычага узла перемотки, средняя из которых выполнена круговой, а внешняя и внутренняя имеют ограниченную длину и переходы в
0
5
5
0
среднюю канавку, и введен снабженный канавкой ползун, который установлен с возможностью перемещения в поперечном относительно концентричных канавок направлении для образования перехода средний паз - внутренний паз и выведения конца переводного рычага узла перемотки во внешний паз, рычажная система дополнительно содержит исполнительный рычаг для перемещения платы магнитных головок в положения записи-воспроизведения и поиска фонограмм и для обеспечения холостого хода кулачка управляющего диска в режимах ускоренных перемоток, а спусковой рычаг ее снабжен криволинейной поверхностью для перемещения ползуна в положения либо образования перехода средний паз - внутренний паз, либо выведения конца переводного рычага узла перемоток во внешний паз управляющего диска и установлен с возможностью перемещения исполнительного рычага, а также введены связанные электрически с микропроцессорным блоком управления датчик положения управляющего диска и датчик исходного состояния лентопротяжного механизма.
г
Nj
XI 1
60 35
33
92
Фиг. 5
60
35
Фиг. Ч
к 29 /
-t-пл.
92 6 28
Фиг. 5
70
21
.-n.-±
гь
Фиг. 6
55
Фиг. 8
W X
34 39
45
43
Фиг. to
