сторе 12с высокой точностью отражает значение массы измеряемого груза 3. Высокая точность измерения обеспечивается симметричной формой коромысла 1 и симметричным расположением обмотки 8 катушки
7 в компенсаторе 6. Аналого-цифровой преобразователь 13 формирует цифровое значение взвешиваемой массы, считываемое с цифрового индикатора 14. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| Способ юстировки чувствительного элемента весов | 1987 |
|
SU1422014A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1352235A1 |
| Способ управления электрогидравлической системой и устройство для его осуществления | 1989 |
|
SU1779806A1 |
| Устройство для определения жесткости и гистерезиса упругой опоры | 1989 |
|
SU1615564A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Весоизмерительное устройство | 1988 |
|
SU1719915A1 |
| Весы с автоматическим уравновешиванием | 1985 |
|
SU1262294A1 |
Изобретение относится к весоизмерительной технике. Цель изобретения - повышение точности измерения. Коромысло 1 выполнено в виде Т-образного равноплечего рычага, одно плечо которого снабжено элементом 16 сопряжения с подвеской 2, другое - подвижной частью 10 датчика 9 разбаланса. Нижний вертикальный выступ 17 рычага 1 снабжен катушкой 7 электромагнитного компенсатора 6. Центр рычага 1 снабжен боковыми симметричными выступали 18 с базовыми поверхностями 19 крепления упругих опор 20 с шейками 21. Шейки 21 упругих опор 20. элемент 16 сопряжения с подвеской 2 и подвижная часть 10 датчика 9 разбаланса расположены в одной горизонтальной плоскости. Оси обмотки 8 катушки 7 перпендикулярны плоскости упругих опор 20 и параллег.ьны горизонтальной плоскости, а обмотка 8 катушки 7 расположена симметрично относительно шеек 21 упругих спор 20. С датчика 9 разбаланса подается СИГНРЛ на интегрирующий усилитель 11, который преобразуется а постоянное напряжение, пропорциональное значению компенсационного тока, протекающего через измерите тьный резистор 12 и обмотку 8 катушки 7 компенсатора б. Падение напряжения на измерительном резиЁ 16 фиг.1
Изобретение относится к весоизмерительной технике и может быть использовано в весах с автоматическим уравновешиванием нагруз ки.
Цель изобретения - повышение точности измерения.
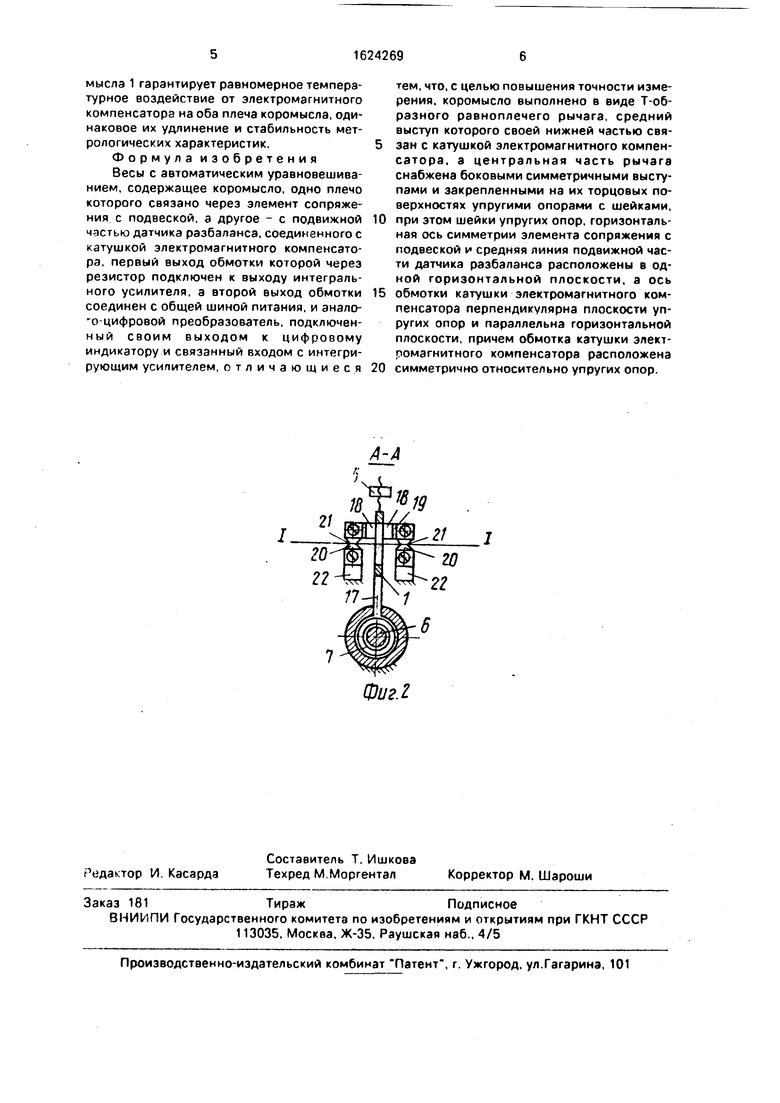
На фиг.1 изображены весы с автоматическим уравновешиванием; на фиг.2 - разрез А-А на фиг. 1.
Весы с автоматическим уравновешиванием содержат коромысло 1, грузоприем- ную подвеску 2 для измеряемого груза 3, тарировочное 4 и регулировочное 5 приспособления, электромагнитный компенсатор 6, содержащий катушку 7 с обмоткой 8, жестко связанную с коромыслом датчик
9разбаланса с подвижной частью 10, интегральный усилитель 11, измерительный резистор 12, аналого-цифровой преобразователь 13, выходом подключенный к цифровому индикатору 14.
Для ограничения угла наклонения коромысла 1 весы снабжены регулируемыми упорами 15. Датчик 9 разбаланса через ин тегральный усилитель 11 и резистор 12 связан с первым выходом обмотки 8 катушки 7 электромагнитного компенсатора 6. выход обмотки 8 соединен с общей или ь питания. Интегральный выход усилите 11 по второму каналу связан с входом аналого- цифрового преобразователя 13.
Коромысло 1 выполнено в виде Т-образного равноплечего рычага, одно плечо которого снабжено элементом 16 сопряжения с подвеской 2. а другое - подвижной частью
10датчика 9 разбаланса
Средний выступ 17 коромысла 1 своей нижней частью связан о катушкой 7 электромагнитного компенсатора 6. Центральная часть рычага 1 снабжена боковыми симметричными выступами 18 с закрепленными на их торцовых поверхностях 19 упругими опорами 20 с шейками 21.
Вторые концы упругих опор 20 прикреплены к основанию 22 весов. Таким образом, коромысло 1 закреплено на упругих опорах 20 и имеет возможность при наложении измеряемой нагрузки 3 на подвеску 2 поворачиваться вокруг оси I-I. проходящей через шейки 21 упругих опор 20, до упоров 15.
Катушка электромагнитного компенсатора 7 закреплена на нижней части среднего выступа 17 коромысла 1 на плече b относительно шеек 21 упругих опор 20 оси I-I.
Для получения высоких метрологических характеристик весов, высокой точности
измерения, исключения температурного дрейфа подвижной части 10 датчика 9 разбаланса, упругих опор20, горизон тальная ось симметрии элемента 16 сопряже ия с подвеской и средняя линия
подвик - ой ча ти 10 9 разбаланса расположены в одной горизонтальной плоское1 ll-li Ось Hi-III обмотки 8 катушки 7 электромагнитного компенсатора перпендикулярна плоскости IV-IV упругих опор 20.
Обмотка 8 чагушки 7 расположена симметрично DTI соительно шеек 21 упругих опор 20.
Ось IM-ISI имотки 8 катушки 7 парал- лельнт го- . чтэльной плоскости 11-И.
Устро-ство работает следующим образом
На п ,двеску 2 накладывают измеряемый груз 3. При этом коромысло 1 наклоняется ка угон, ограничиваемый упорами
15 С датчика 9 разбаланса подается сигнал на интегральный усилитель 11, который преобразуется в постоянное напряжение, пропорциональное значению компенсационного тока, протекающего через имерительный резистор 12 и обмотку 8 катушки 7 электромагнитного компенсатора 6
Падение напряжения на измерительном резистор 12 с высокой точностью отрзжает значение массы измеряемого груза 3, а аналого-цифровой преобразователь 13 формирует цифровое значение взвешиваемой массы, считываемое с цифрового индикатора 14.
Соотношение плеч коромысла а и b может конструктивно меняться в широких пределах, что позволяет при малых измеряемых нагрузках 3 получить значительный компенсационный ток в обмотке 8. Это увеличивает
разрешающую способность весов при малых нагрузках, при а Ь, а при больших нагрузках, наоборот, можно сделат плечо b а, что уменьшает компенсационный ток, а следовательно, выделремое тепло от
электромагнитного компенсатора 6.
Симметричное расположение обмотки электромагнитного компенсатора 6 коромысла 1 гарантирует равномерное температурное воздействие от электромагнитного компенсатора на оба плеча коромысла, одинаковое их удлинение и стабильность метрологических характеристик. Формула изобретения Весы с автоматическим уравновешиванием, содержащее коромысло, одно плечо которого связано через элемент сопряжения с подвеской, а другое - с подвижной частью датчика разбаланса, соединенного с катушкой электромагнитного компенсатора, первый выход обмотки которой через резистор подключен к выходу интегрального усилителя, а второй выход обмотки соединен с общей шиной питания, и энало- о-цифровой преобразователь, подключенный своим выходом к цифровому индикатору и связанный входом с интегрирующим усилителем, отличающиеся
тем, что, с целью повышения точности измерения, коромысло выполнено в виде Т-образного равноплечего рычага, средний выступ которого своей нижней частью связан с катушкой электромагнитного компенсатора, а центральная часть рычага снабжена боковыми симметричными выступами и закрепленными на их торцовых поверхностях упругими опорами с шейками, при этом шейки упругих опор, горизонтальная ось симметрии элемента сопряжения с подвеской и средняя линия подвижной части датчика разбаланса расположены в одной горизонтальной плоскости, а ось обмотки катушки электромагнитного компенсатора перпендикулярна плоскости упругих опор и параллельна горизонтальной плоскости, причем обмотка катушки электромагнитного компенсатора расположена симметрично относительно упругих опор.
Фиг. 2
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1352235A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Весы с автоматическим уравновешиванием | 1985 |
|
SU1262294A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
