Изобретение относится к силоизмери- тельной технике и может быть использовано в системах измерений обобщенных механических сил или давлений с применением вычислительной техники.
Цель изобретения - повышение точности измерений за счет возможности изменения амплитуды и периода автоколебаний.
На фиг. 1 приведена структурная схема преобразователя; на фиг. 2 - фазовые диаграммы работы преобразователя.
Преобразователь (фиг. 1) содержит механический элемент 1 сравнения, постоянный магнит 2, внутри которого движется сердечник 3, датчик 4 положения элемента сравнения, суммирующий релейный элемент, включающий два постоянных сопротивления 5 и 6, усилитель 7 постоянного тока, переменное сопротивление 8, опору 9, вокруг которой вращается элемент сравнения, катушку 10 скоростной коррекции и исполнительную катушку 11, намотанные на сердечнике 3. Катушки 10 и 11 соединены с соответствующими выходами суммирующего элемента. Выход суммирующего элемента является выходом всего преобразователя.,
Преобразователь работает следующим образом.
Измеряемое усилие F прикладывается к рычажному элементу 1 сравнения. Сигнал отклонения элемента сравнения с датчика 4 суммируется сумматором 5-8 с сигналом скорости, снимаемой с катушки 10, так что напряжение на выходе сумматора в зависимости от знака этой суммы принимает два фиксированных уровня Переключение уровня происходит с коррекцией во времени, определяемой шириной зоны гистерезиса сумматора. Зона гистерезиса регулируется потенциометром 8.
В зависимости от уровня выходного напряжения сумматора силовой элемент на катушке 11 или включает встречное по отношению к F усилие FQC. большее, чем F по абсолютному значению, или выключает его В соответствии с работой взвешигающего сумматора 5-8 значение усилия F0c обратной связи определяется следующим выражением
For - sign (V-aX-b signV),
где условно принято F0c ±1, причем Foc 1 соответствует включенному силовому элементу; F г - -1 - выключенному, диапазон измеряемых усилий в этих условиях F (-1,1); V - скорость элемента сравнения; X - его отклонение от положения равновесия: а. b -- коэффициенты определяемые сопротивлениями 5 6 8 сумматора
а -Ка R5/R6, Ь Кь R5/R8, где R5, R6, R8 - сопротивления резисторов 5, 6,8 соответственно;
Ка, Кь - коэффициенты пропорциональ- ности;
b - ширина зоны гистерезиса,
а - скорость сходимости переходных режимов.
При таком законе переключения Foc ус- тановившемуся режиму преобразования соответствуют автоколебания, в которых переключение силового элемента следует сразу за отклонением элемента 1 сравнения
Foc signX.
Предельный цикл установившихся автоколебаний образован участками парабол, соответствующих F0c 1 и FQC -1, сопрягающихся в точках (о, Ь) и (о, -Ь) фазовой плоскости (фиг. 2). Это следует из анализа уравнений движения рычажного механизма. Уравнения имеют вид
I
d V
- F - Fr
d X
V,
(1)
d t d t где I - момент инерции; 5t - время.
Из этих уравнений следуют выражения для фазовых траекторий dXV
d V F - Foc 0 или, интегрируя
АО
I
(V2 - V02) ,
(2)
F-FOC
где Х0, V0 - координаты точек, соответствующих начальным условиям.
5Нетрудно видеть, что уравнение (2) соответствует параболе в координатах (X, V), параметры которой определяются значениями F, Х0, V0(npn постоянных I, F0c). Периодическому режиму соответствуют
0 следующие значения начальных условий Х0 О, V0 ±b, поэтому при некотором F период и амплитуда автоколебаний зависят только от Ь. Требуемую величину b выбирают изменением сопротивления потенцио5 метра 8.
Выходной сигнал катушки 10, пропорциональный скорости движения элемента сравнения, вводят для коррекции переход0 ных режимов преобразования. Он приводит к наклону полупрямых фазовой плоскости, на которых происходит переключение уровня FOO против часовой стрелки на угол «, а, вокруг точек (о, Ь) и (о, -Ь). Параметры
5 установившихся колебаний от угла а не зависят, а зависит только скорость затухания переходных процессов.
Статическую характеристику преобразования определяют,интегрируя уравнение
(1) на двух последовательных участках постоянства Foe
Vi V0 + I (F - 1)tT
V0 - Vi + I (F + 1)tp , где tT - интервал времени, на котором F0c
л ,
I ,
tp - интервал, соответствующий F0c «-1. В силу периодичности значение V в начале одного участка равняется значению V в конце предыдущего.
Из этих уравнений имеют
1/ 2tT i v
-1).
I V tp + tr
где tp + tr Т - период автоколебаний.
Очевидно, что отношение tT/T - величина, пропорциональная F, и статическая характеристика Т.Т/Т линейна,
Режим преобразования является динамическим. В моменты отсчета механический момент сравнения находится в состоянии автоколебаний. Поэтому сухое трение в опорах рычажного механизма и элементах, передающих на него измеряемое усилие, а
также гистерезис силового элемента обратной связи, практически не вносят вклада в средний небаланс сравниваемых усилий, что повышает точность измерений.
Формула изобретения Преобразователь механических сил в широтно-модулированный сигнал, содержащий механический элемент сравнения, дат0 чик положения элемента сравнения, силовой элемент обратной связи с постоянным магнитом, отличающийся тем, что, с целью повышения точности измерений за счет возможности изменения ампли5 туды и периода автоколебаний, в него введены катушка скоростной коррекции, расположенная в поле магнита силового элемента обратной связи, и суммирующий релейный элемент с настраиваемой зоной
0 гистерезиса, причем катушка подключена к одному из входов суммирующего релейного элемента, а к другому его входу подключен датчик положения элемента сравнения.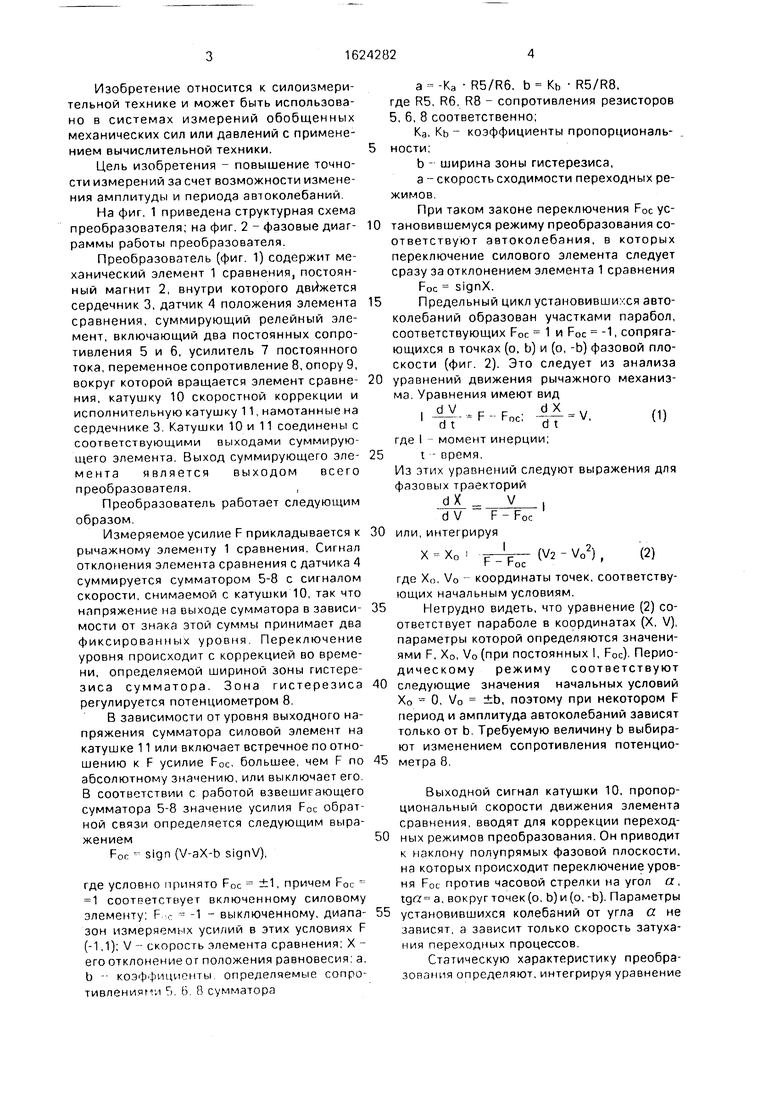
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический усилитель | 1990 |
|
SU1710866A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2011 |
|
RU2462744C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| СПОСОБ АДАПТИВНОЙ КОРРЕКЦИИ МНОГОПОЗИЦИОННЫХ СИГНАЛОВ | 1990 |
|
RU2024201C1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 2015 |
|
RU2606149C2 |
| Релейный стабилизатор постоянного напряжения | 1988 |
|
SU1529196A1 |
| Многозонный развертывающий преобразователь | 1987 |
|
SU1418765A1 |
Изобретение относится к силоизмери- тельной технике и позволяет повысить точность измерений обобщенных механических сил или давлений. Измеряемое усилие F прикладывается к рычажному элементу 1 сравнения. Сигнал отклонения элемента сравнения с датчика 4 суммируется суммаФиг.1 тором, содержащим два постоянных сопротивления 5 и 6, усилитель 7 постоянного тока и переменное сопротивление 8, с сигналом скорости, снимаемым с катушки 10. Напря сние на выходе сумматора в зависимости от знака этой суммы принимает два фиксированных уровня. Переключение уровня происходит с коррекцией во времени, определяемой шириной зоны гистерезиса сумматора В зависимости от уровня выходного напряжения сумматора силовой элемент на катушке 11 или включает встречное по отношению к F усилие F0c. большее, чем F по абсолютному значению, или выключает его. В моменты отсчета механический элемент 1 сравнения находится в состоянии автоколебаний, отношение времени действия усилия F0c к периоду автоколебаний пропорционально измеряемой силе F. 2 ил. Ј О ьо -N hO 00 го
| Магнитоэлектрический динамометр | 1950 |
|
SU93593A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
