Изобретение относится к гидроавтоматике, предназначено преимущественно для систем стабилизации шасси транспортных машин при движении по неровностям и может быть использовано для регулирования давления в цилиндрах активных систем подрессоривания.
Известны электрогидравлические уси- пители (ЭГУ) с обратной связью по давлению, которые могут применяться для эегулирования давления и расхода в активных подвесках ходовой части транспортных ашин.
ЭГУ содержат последовательно соединенные электромеханический преобразователь, управляемый гидравлический мостик ла элементах сопло-заслонка с постоянны-1
ми дросселями, в диагональ которого включен золотник, снабженный плунжерами обратной связи по давлению нагрузки.
Они могут управлять либо двухполост- ной нагрузкой (ЭГУ БСЗ.254.017), либо од- нополостной (3DS 2ЕН 10), что необходимо для применения с оДнополостными цилиндрами активных подвесок. Благодаря плунжерной обратной связи такие ЭГУ могут обеспечить мягкую обкатку неровностей без возмущений шасси дополнительными усилиями на штоке.
Известны также мощные трехкаскад- ные ЭГУ позиционного типа (без обратной связи по давлению), содержащие датчик перемещений выходного золотника для регулирования его позиции (ЭГУ типа 4WS3
О 00
Qs Ov
ЕЕ22), однако они не могут применяться непосредственно в активных подвесках, так как не обеспечивают малрвозмущенной обкатки неровностей из-за жесткой обратной связи по перемещению золотника.
Наиболее близким по технической сущности к предлагаемому является гидроусилитель 3DS2E НЮ, содержащий последовательно соединенные электромеханический преобразователь, элемент сопло-заслонка и двухкромочный золотник с плунжером обратной связи по давлению нагрузки.
Специфика применения ЭГУ для активной подвески нагруженных транспортных средств требует давления питания мощного золотника с уровнем до 25 МПа в сети и расходом до 3 л/с при обеспечении широкой полосы пропускания (до 40 Гц) расходных возмущений от цилиндров ходовой части. Для удобства эксплуатации питание первого каскада ЭГУ сопло - заслонка целесообразно осуществить от той же сети 25 МПа. Кроме того, управление положением транспортного средства на стоянке и движение на участках ровной дороги (без расходов через гидроцилиндр) требует положительных перекрытий в полостях нагнетания и слива для снижения энергетических потерь, т. е. реализации непроточного золотника с общими статическими потерями ЭГУ до 0,1 л/с.
Такая конструкция с питанием первого каскада высоким давлением в сочетании с мощным непроточным золотником и плунжерной обратной связью создает проблемы с демпфированием ЭГУ.
Экспериментальная обработка и расчет показывают, что такая конструкция оказывается неустойчивой с наличием автоколе- баний в контуре обратной связи п о давлению. Амплитуда автоколебаний ограничивается только давлением сети.
Демпфирование автоколебаний в известных ЭГУ достигается за счет отрицательных перекрытий в полостях нагнетания и слива, т, е. применение проточных золотников.
Подобным образом демпфируются ЭГУ БС3.254 017 и 3DS2EH10, однако при этом существенно снижается КПД и ухудшаются энергетические показатели. Если применение проточных ЭГУ приемлемо при построении маломощных гидроприводов, то их применение в активных подвесках создает недопустимые потери мощности из сети, приводит к перегреву на стоянке и существенному снижению КПД транспортной машины. Расчеты показывают, что использование дополнительных дросселей
внутри силового золотника не решает.полностью вопросов устойчивости и не позволяет выполнить золотники непроточными. К тому же со снижением перетечек подобная
конструкция оказывается более критичной к отношению эффективных площадей дополнительных дросселей (в пределах 0,1-4X15) и температурных разбросов.
В гидроусилителе не предусмотрено де0 мпфирующих элементов, поэтому устойчивая работа может быть достигнута только за счет снижения коэффициента обратной связи по давлению, падения быстродействия и повышения потерь в элементе сопло - за5 слонка.
Особенности применения непроточных ЭГУ с цилиндрами активных подвесок заключаются также в изменении сжимаемых объемов масла при движении штока., вызы0 вающих соответственно изменения динамических характеристик ЭГУ (собственной частоты, демпфирования, быстродействия и
ДР)..
Целью изобретения является эффектив5 ное демпфирование ЭГУ при одновременном повышении КПД.
С этой целью в электрогидроусилитель, содержащий последовательно соединенные электромеханический преобразова0 тель, элемент сопло - заслонка и золотник с плунжером обратной связи по давлению нагрузки, введены датчик перемещений золотника (ДПЗ), дифференциатор, электронный усилитель и входной сумматор, причем вы5 ход датчика через дифференциатор, сумматор и электронный усилитель к электромеханическому преобразователю, а вход электрогидравлического усилителя связан с вторым входом сумматора, кроме
0 того, золотник выполнен непроточным.
Применение ДПЗ в трехкаскадных ЭГУ известно однако в известном решении ДПЗ применен как главная обратная связь для позиционирования силового золотника, что
5 невозможно применять в активных подвесках. Существенным отличием применения ДПЗ в предлагаемом ЭГУ является его подключение через дифференциатор для демпфирования контура главной обратной
0 связи по давлению нагрузки, реализуемого плунжером. Введение в ЭГУ наряду с обратной связью по давлению дополнительной жесткой обратной связи по перемещению золотника неприемлемо из-за принципи5 ального ухудшения внешних расходных ха,- рактеристик, так как основная задача ЭГУ в соответствии со спецификой применения - это обеспечить инвериантность (нечувствительность) к расходным возмущениям, а же- сткая обратная связь по перемещению
действует в противоположном направлении. Кроме того, она не имеет достаточных запасов устойчивости по фазе, что снижает ее эффективность в части демпфирования контура главной обратной связи.
Дальнейшим усовершенствованием изобретения является введение нелинейного элемента типа ограничение на входе дифференциатора с насыщением на уровне 25% от полного хода золотника. Дело в том, что смещение золотника соответствует расходам QH через нагрузку. При этом пропорционально росту расхода (смещение золотника) падает коэффициент передачи
dP .у по давлению от смещения золотника
X. Это повышает устойчивость ЭГУ, что и обеспечивает демпфирование проточных золотников.
Для эффективного демпфирования непроточного предлагаемого ЭГУ на стоянке машины при достаточно действия вводимой обратной связи в упомянутом диапа- зоне линейности /X/ 0,25ХМакс. За границами этого диапазона, как показывают расчеты и эксперимент, ЭГУ будет достаточно хорошо демпфирован расходами нагрузки QH, несмотря на насыщение канала обратной связи по ДПЗ. Такой подход обеспечивает эффективное демфирование ЭГУ на стоянке машины и при движении по ровной дороге, когда смещение X близко к 0. В то же время вводимая обратная связь при выходе на ограничение не препятствует быстрому перемещению золотника и мягкой маловозмущенной обкатке подвесками неровностей большой амплитуды (,2 М) и высокой частоты (f 2 Гц) при QH 0,25 Омакс. Поскольку предлагаемый ЭГУ является непроточным, то существенное влияние на его динамические характеристики (полосу пропускания, фазовое запаздывание и др.) оказывает изменение сжимаемого объема (гидроцилиндра активной подвески), который варьируется от 0,2 до 2 л при движении штока подвески в крайние положения. Для-стабилизации динамических характеристик ЭГУ целесообразно использовать в его выходной полости гид- ропневмоаккумулятор (ГПА) .малой емкости (до 0,15 л) с начальной заправкой до 0,3 давления сети. При этом ЭГУ обеспечит одновременно со стабилизацией характеристик поглощения возмущений высокой (более 20 Гц) частоты и малой амплитуды (траковых возмущений). Динамика сжатия определяется в этом случае не объемом масла, а давлением и объемом газа, что стабилизирует характеристики ЭГУ, Небольшое (до 20°) фазовое запаздывание по давлению
на частоте 10-20 Гц, вносимое I ПА при его малой емкости, не препятствует использованию в составе замкнутых систем активного подрессоривания.
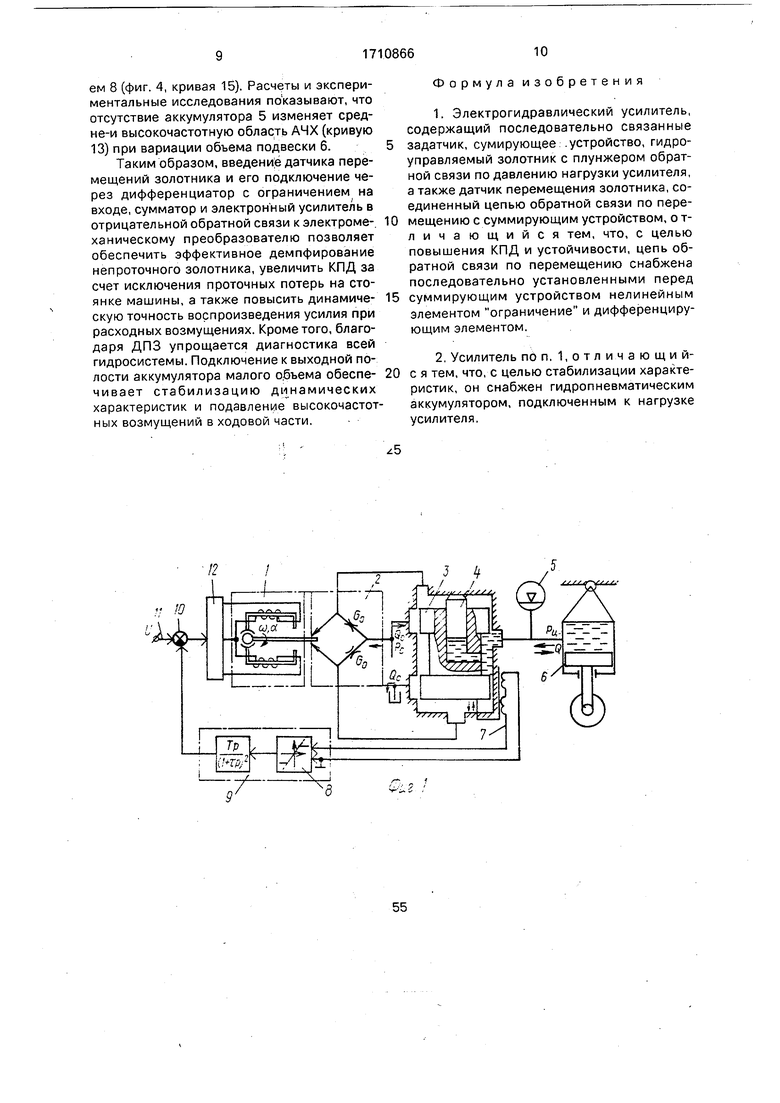
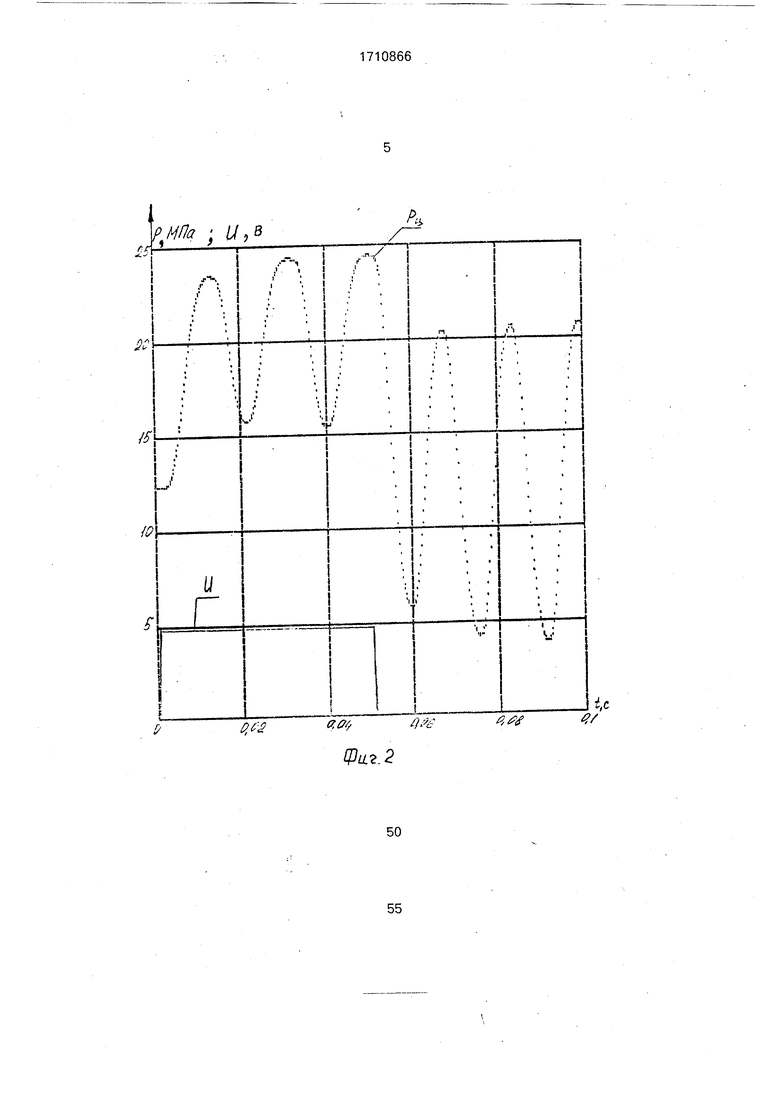
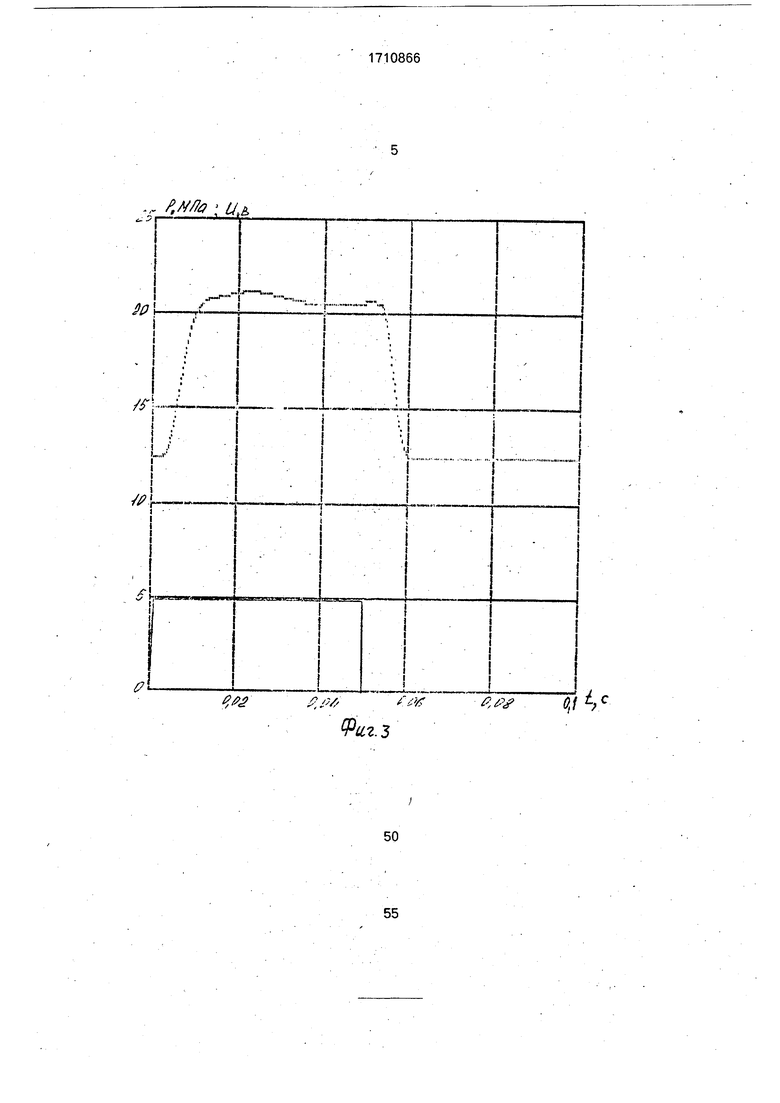
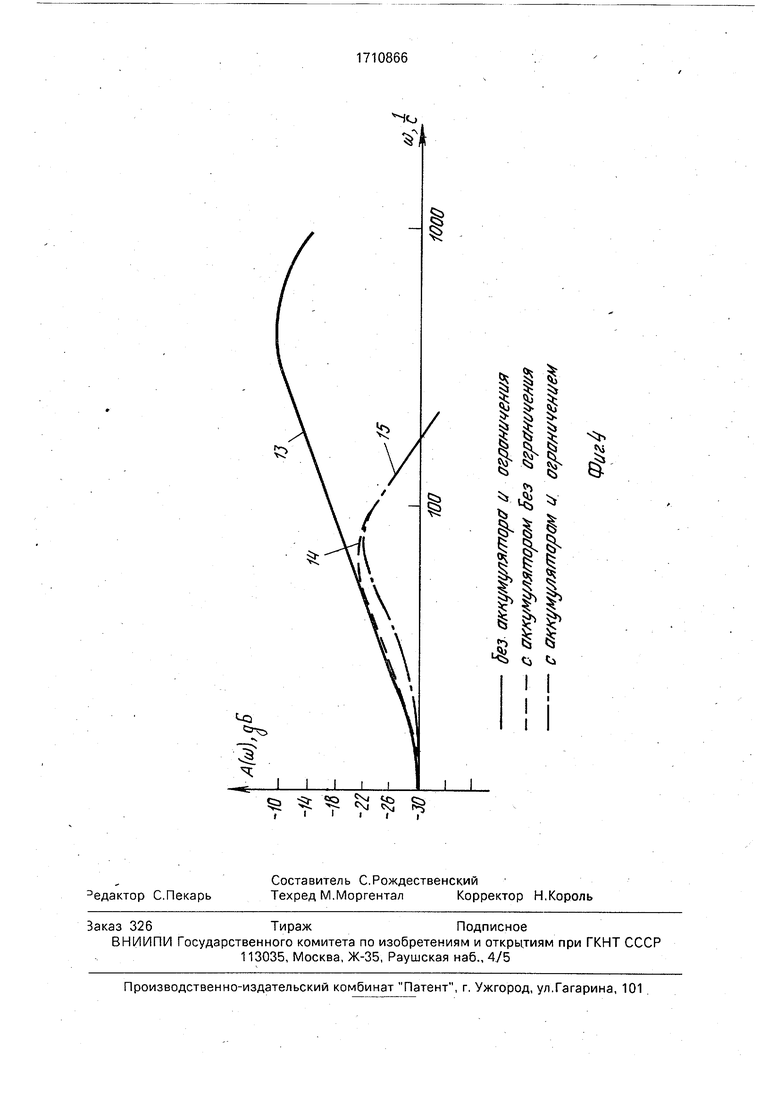
На фиг. 1 представлена функциональная схема ЭГУ; на фиг. 2 - переходный процесс по управлению без обратной связи на базе ДПЗ; на фиг. 3 - то же, при наличии обратной связи; на фиг. 4 - амплитудно-частотные характеристики ЭГУ по расходным возмущениям.
Электрогидравлический усилитель (фиг. 1) содержит задатчик (не показан), последовательно соединенные электромеханический преобразователь 1, элемент сопло - заслонка 2, представляющий регулируемый мост, в одну диагональ которого включен источник гидравлической энергии с давлением сети МПа, а в другую - управляемый золотник 3. Внутри золотника 3 расположен плунжер 4 обратной связи по давлению цилиндра Рц. Золотник 3 имеет положительные перекрытия в полостях нагнетания и слива. К выходной полости гидроусилителя может быть подсоединен пневмогидроаккумулятор 5. Нагрузкой является активная управляемая подвеска (цилиндр) 6. Смещение X золотника 3 измеряется датчиком 7 перемещений золотника, Датчик 7 перемещений золотника является устройством индуктивного типа с питанием 5 кГц, преобразующим перемещение золотника в напряжение. Это напряжение может быть ограничено по смещению
X золотника 3 на уровне 0,25 X с помощью нелинейного элемента 8 ограничения на входе дифференцирующего элемента 9. Выход дифференциатора 9 связан с одним входом суммирующего устройства 10, второй
вход 11 которого является входом ЭГУ. Выход сумматора 10 через электронный усилитель 12, например, дифференциального типа соединен с электромеханическим преобразователем 1.
В неподвижном состоянии машины и при отсутствии управляющего сигнала U на входе 11 золотник 3 располовинивает
давление сети Рс. При этом давление в ци- р
линдре 12,5 Мпа удерживает машину с помощью активной подвески 6 в номинальном клиренсе. Это реализуется за счет главных обратных связей по положению шасси (не показаны). Уравнение статического равновесия золотника 3 определяется площадью плунжера 4 обратной связи по давлению нагрузки F0c, a также площадями двух торцов золотника Рз и Рз-Foc. Гидравлический мост 2 настраивается так,чтобы обеспечить на управляемой диагонали статическое располовинива- ние сетьевого давления. Под торцами
Рс
золотника давления ческого уравнения
, поэтому из статиРР
2 ( FOC ) + Рц FOC п РЭ
давление в цилиндре Рц
Отрицательная обратная связь по скорости перемещения золотника 3, реализуемая датчиком 7, дифференциатором 9, входным сумматором 10 и усилителем 11 мощности, обеспечивает эффективное демпфирование ЭГУ в полосе частот до 150 Гц, ограниченной постоянными времени т 0,0005 с фильтра в канале дифференциатора 9. При наезде машины активной подвеской 6 на выбоину каток движется вниз,
давление Рцуменьшается относительно стар
тического уровня Рц -Ј- , Падение давления в цилиндре мгновенно нарушает статическое равновесие и воздействует на золотник 3 так, что он смещается (на фиг, 1 вверх), обеспечивая подачу масла из сети через кромку нагнетания. При наезде на валик шток подвески 6 движется вверх, повышая давление на плунжере 4. Золотник 3 смещается (на фиг. 1 вниз), автоматически сбрасывая масло из цилиндра через сливную кромку, обеспечивая маловозмущенную обкатку неровностей. При больших скоростях обкатки микропрофиля подвеской 6 и соответственно расхрдах нагрузки Q, когда смещение золотника.3 превышает 0,25 Хмакс, отрицательная обратная связь в канале ДПЗ ограничивается нелинейным элементом 8 на входе дифференциатора 9, что уменьшает демпфирующий сигнал и соответствующую реакцию от заслонки на сопла. Это способствует более быстрому смещению силового золотника 3 и повышает точность стабилизации давления Рц при действии расходных возмущений, а следовательно, и плавность хода машины.
Давление заправки аккумулятора 5 выбирается 5,0-7,0 МПа, поэтому в статичер
ском состоянии при Рц -Ј- мембрана
аккумулятора 5 находится в промежуточном положении. Статическое перемещение штока подвески 6 практически не изменяет податливость рабочей полости нагрузки, которая определяется жесткостью аккумулятора 5. Это стабилизирует динамические характеристики ЭГУ.
Кроме того, аккумулятор 6 позволяет поглотить импульсы расхода нагрузки Q малой
амплитуды и траковой частоты (f 10 Гц), что снижает высокочастотную тряску, например, при движении по брусчатке.
На фиг. 2 показан переходный процесс в ЭГУ при отключении электрической обратной связи, реализуемой датчиком перемещений золотника, в ЭГУ без ГПА. Процесс сопровождается незатухающими автоколебаниями 50 Гц вокруг
р
равновесного состояния Рц .Автоколебания ограничиваются давлением сети Рс. Включение к выходной полости ЭГУ дополнительного ГПА уменьшает частоту автоколебаний до 20 Гц, но не решает вопросов
демпфирования.
На фиг. 3 показан тот же переходный процесс при введении электрической обратной связи по перемещению золотника в соответствии с изобретением. Из фиг. 3
следует эффективность демпфирования ЭГУ упомянутым способом с обеспечением безрезонансных характеристик. Ограничение сигнала нелинейным элементом 8 на входе дифференциатора 9 практически
не изменяет переходный процесс, так как вариации давления Рц при 0 0 осуществляются смещением золотника в пределах положительных перекрытий
/X/ 0,05 Хмакс.
На фиг. 4 показаны амплитудно-частотные характеристики ЭГУ с параметрами Рс 25МПа, л/с по расходным возмущениям при амплитуде расхода ,4 л/с, полученные при исследовании на ЦВМ полной нелинейной модели ЭГУ с разложением в ряд и выделением первой гармоники давления цилиндра Рц. При этом кривая 13 показывает характеристику ЭГУ без аккумулятора 5 и ограничения 8 на входе
дифференциатора 9, кривая 14 - характеристики ЭГУ без ограничения 8, но при наличии аккумулятора 5, кривая 15 - при наличии аккумулятору 5 и ограничения 8 на входе дифференциатора 9. Статический коэффициент передачи - 30 дБ (фиг. 4) при частоте
возмущающего расхода f 2 Гц, (и 12 -)
L
соответствует изменению давления на 0,8 Мпа относительно номинального,уровня 12,5 Мпа при ,4 л/с. С ростом частоты возмущения Q растет амплитуда изменения давления. Наиболее эффективное подавление расходлых возмущений достигается при сочетании аккумулятора 5 с ограничением 8 (фиг. 4, кривая 15). Расчеты и экспериментальные исследования показывают, что отсутствие аккумулятора 5 изменяет сред- не-и высокочастотную область АЧХ (кривую 13) при вариации объема подвески 6.
Таким образом, введение датчика перемещений золотника и его подключение через дифференциатор с ограничением на входе, сумматор и электронный усилитель в отрицательной обратной связи к электроме-. ханическому преобразователю позволяет обеспечить эффективное демпфирование непроточного золотника, увеличить КПД за счет исключения проточных потерь на стоянке машины, а также повысить динамическую точность воспроизведения усилия при расходных возмущениях. Кроме того, благодаря ДПЗ упрощается диагностика всей гидросистемы. Подключение к выходной полости аккумулятора малого о.бъема обеспе- чивает стабилизацию динамических характеристик и подавление высокочастотных возмущений в ходовой части.
:l
0 0
5
Формула изобретения
1.Электрогидравлический усилитель, содержащий последовательно связанные задатчик, сумирующее .устройство, гидро- управляемый золотник с плунжером обратной связи по давлению нагрузки усилителя, а также датчик перемещения золотника, соединенный цепью обратной связи по перемещению с суммирующим устройством, о т- личающийся тем, что, с целью повышения КПД и устойчивости, цепь обратной связи по перемещению снабжена последовательно установленными перед суммирующим устройством нелинейным элементом ограничение и дифференцирующим элементом.
2.Усилитель пб п. 1, о т л и ч а ю щ и й- с я тем, что, с целью стабилизации характеристик, он снабжен гидропневматическим аккумулятором, подключенным к нагрузке усилителя.
Изобретение относится к гидроавтоматике и может быть использовано для регулирования давления в цилиндрах активных подвесок систем подрессоривания самоходных машин. Цель изобретения - повышение КПД и устойчивости, а также стабилизация характеристик. В неподвижном состоянии машины и отсутствии управляющего сигнала задатчика давление нагрузки удерживает машину. При наезде активной подвеской 6 на выбоину давление нагрузки уменьшается. Статическое равновесие золотника 3 нарушается, и он смещается, обеспечивая дополнительную подачу рабочей жидкости. При наезде на валик давление нагрузки увеличивается, золотник 3 смещается, обеспечивая сброс рабочей жидкости. При больших скоростях обкатки профиля подвеской 6 в цепи отрицательной обратной связи сигнал ограничивается нелинейным элементом 8, что уменьшает демпфирующий сигнал. Это способствует более быстрому смещению золотника 3 и стабилизирует давление нагрузки. 1 з. п. ф-лы, 4 ил. w Ё
к
о
оэ
CD Оэ
Wfo:
Риг.З
Q t
ч
5
Ч
§ I l I $ I III
v
Ј
III
- «s
ь
III
n
g § §
Q «o
h
I
| Электрогидравлическая следящая система | 1980 |
|
SU928090A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
