Изобретение относится к технике электросвязи и предназначено для использования в приемных устройствах преобразования сигналов, работающих в многоточечных сетях передачи данных.
Цель изобретения - обеспечение коррекции сигналов с неизвестными тактовыми и несущими частотами.
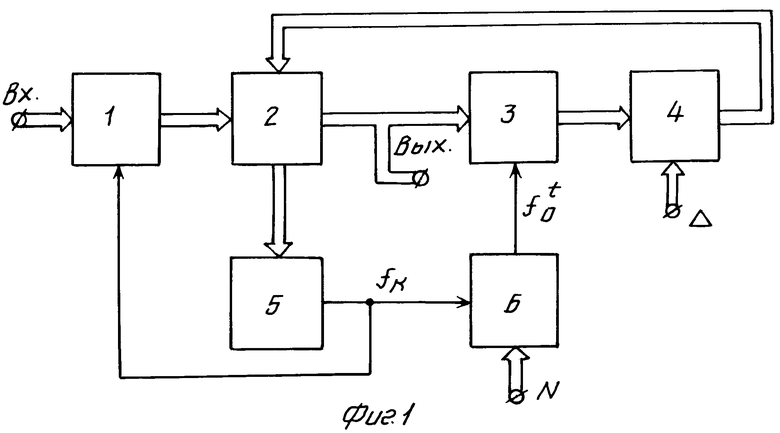
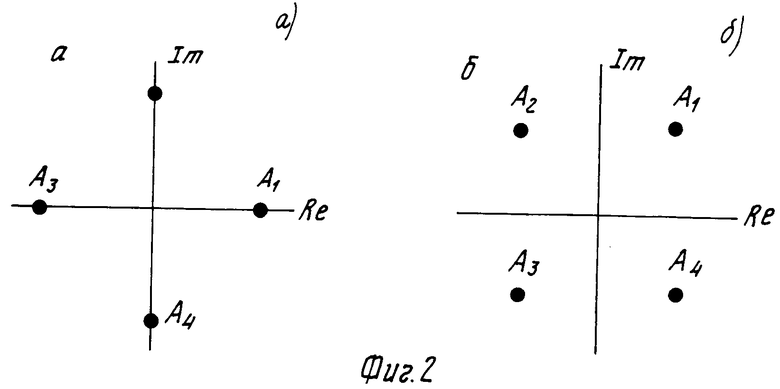
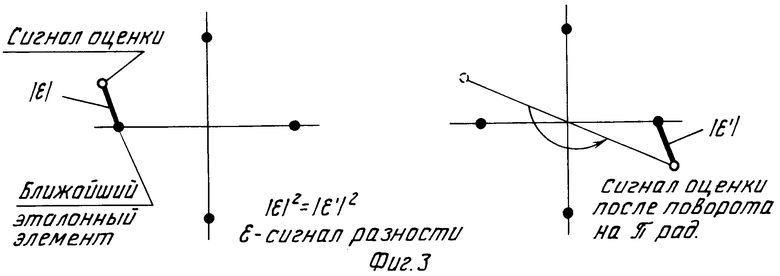
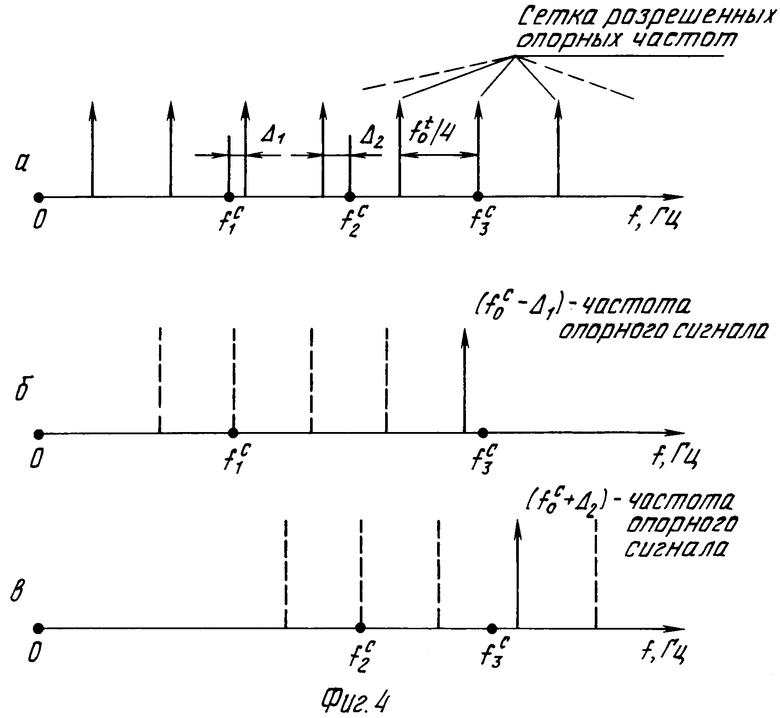
На фиг. 1 приведена структурная схема устройства для осуществления предлагаемого способа; на фиг. 2 - векторная диаграмма ансамблей сигнала двукратной фазовой модуляции: а - без поворота; б - с поворотом на 45о; на фиг. 3 - наглядное представление формирования сигнала разности; на фиг. 4 - наглядное представление формирования опорного сигнала: а - сетка опорных частот при Fc = {f1c, f2c, f3c}; б - частота опорного сигнала при приеме сигнала с частотой несущей f1c при f0c = f3cи Δ = = Δ 2; в - частота опорного сигнала при приеме сигнала с частотой несущей f2c при f0c = f3c и Δ = Δ 2.
Способ включает в себя квантование сигнала по времени и уровню, преобразование его в сигнал цифровой информации. Далее полученный сигнал фильтруют с помощью фильтра-корректора. Отфильтрованный сигнал прореживают с частотой f0t, после чего посредством когерентного детектирования прореженного сигнала выделяют огибающую сигнала, являющуюся сигналом оценки. Причем для когерентного детектирования формируют опорный сигнал с частотой (f0c ± Δ ). Далее измеряют сигнал разности между сигналом оценки и эталонным сигналом, в качестве которого используют ближайший к сигналу оценки элемент ансамбля сигнала двукратной фазовой модуляции. Затем по измеренному сигналу разности производят изменение коэффициентов фильтра-корректора до достижения минимума среднего квадрата сигнала разности. Причем при формировании сигналов обеспечивают выполнение следующих соотношений:
f ; (1)
; (1)
f x
x f
f +
+  , f
, f (2)
(2)
Δ =  ax
ax  f
f + 0,5
+ 0,5 (3)
(3)
fк = Nf0t ≥ 2 Δ f, (4) где f0t - частота прореживания;
[T1,...,Tn] - наименьшее общее кратное совокупности тактовых интервалов передаваемых сигналов;
М и N - произвольные натуральные числа;
f0c - опорная частота;
fic - несущая частота сигнала i-го вида;
max(˙) - операция определения максимального числа;
К - произвольное целое;
Δ - сдвиг опорной частоты;
[Z] - целая часть числа Z;
fк - частота квантования;
Δ f - полоса частот корректируемого сигнала;
n - число различных тактовых частот передаваемых сигналов;
m - число различных несущих частот передаваемых сигналов.
Отметим, что обычно в демодуляторах многопозиционных сигналов обработка сигнала осуществляется дискретно через тактовые интервалы (ТИ) времени Т = 1/ft, где ft - тактовая частота принимаемого сигнала. Если же ft не определена, но априорно известно, что она принадлежит известной совокупности Ft = { f1t, ..., fnt} тактовых частот, то подстройку фильтра-корректора предлагается осуществлять через ТИ, длительность которого равна или в целое число раз превышает наименьшее общее кратное [T1,...,Tn] всех ТИ (где Тi = 1/fit). Понятно, что при этом тактовая частота обработки сигнала f0t снизится, но зато будет удовлетворять всему конечному набору априорно допустимых тактовых частот.
Выражение (4) отражает факт синхронности процесса квантования и процесса дискретной обработки сигнала и необходимость соблюдения при квантовании теоремы Котельникова.
При отсутствии информации о несущем колебании предлагается выполнение следующих действий. Если несущая частота не определена, но известна совокупность несущих частот Fc = {f1c,...,fmc}, к которой принадлежит данная неизвестная частота принимаемого сигнала, то определяется опорная частота f0c как универсальная для всей совокупности. При этом использовано свойство инвариантности ансамблей многопозиционных сигналов к поворотам по фазе на целое число π /2 радиан. Таким образом детектируемый отсчет сигнала может поворачиваться относительно эталонного за ТИ обработки Т0 = 1/f0t на целое число π /2 радиан, что не повлияет на значение квадрата сигнала разности (см. фиг. 3). Аналитически это свойство можно записать в виде системы из m линейных уравнений -
-  =
=  Xi, i =
Xi, i =  (5)
(5)
i = 1,m где неизвестные foc, Δ i и Xi; причем Xi - произвольные целые числа, а Δ i - полоса захвата системы фазовой автоподстройки частоты (ФАПЧ) для несущей частоты fic. Формулы (2) и (3) являются решением системы (5) с учетом того, что полоса захвата системы ФАПЧ Δ = |m x Δi| . Выражение (2) показывает, что в качестве опорной частоты необходимо выбирать положительную частоту, отстоящую от максимально возможной несущей частоты на целое число f0t/4. Таким образом получается сетка разрешенных опорных частотб отстоящих друг от друга на f0t/4 (см. фиг. 4,а). При приеме сигнала с fic выбранная согласно (3) полоса захвата Δ системы ФАПЧ обеспечит перестройку опорного сигнала на величину Δ i ≅ Δ так, что произойдет захват по фазе несущей частоты (см. фиг. 4,б и 4,в). При этом несмотря на то, что foc ± Δ может значительно отличаться по величине от fic, между опорным и несущим колебаниями за ТИ обработки Т0будет набег фазы кратный π /2, что не повлияет на процесс коррекции.
x Δi| . Выражение (2) показывает, что в качестве опорной частоты необходимо выбирать положительную частоту, отстоящую от максимально возможной несущей частоты на целое число f0t/4. Таким образом получается сетка разрешенных опорных частотб отстоящих друг от друга на f0t/4 (см. фиг. 4,а). При приеме сигнала с fic выбранная согласно (3) полоса захвата Δ системы ФАПЧ обеспечит перестройку опорного сигнала на величину Δ i ≅ Δ так, что произойдет захват по фазе несущей частоты (см. фиг. 4,б и 4,в). При этом несмотря на то, что foc ± Δ может значительно отличаться по величине от fic, между опорным и несущим колебаниями за ТИ обработки Т0будет набег фазы кратный π /2, что не повлияет на процесс коррекции.
Способ может быть реализован, например, с помощью устройства, изображенного на фиг. 1, которое содержит последовательно соединенные блоки аналого-цифрового преобразования (АЦП) 1, фильтра-корректора 2, блок задержки 3 и блок синхронизации опорного колебания 4, второй вход которого является первым установочным входом устройства, а выход подключен к второму входу фильтра-корректора 2, второй выход которого подключен к входу блока тактовой синхронизации 5, выход которого подключен к тактовым входам блока АЦП 1 и делителя 6, второй вход которого является вторым установочным входом устройства, а выход подключен к тактовому входу блока задержки 3, причем вход блока АЦП 1 является информационным входом устройства, а выход фильтра - корректора 2 - выходом устройства.
Работает устройство следующим образом.
На вход блока АЦП 1 в виде двух составляющих поступает модулированный многопозиционный сигнал Z(t), имеющий межсимвольные искажения (МСИ). Для удобства описания преобразований представим Z(t) как аналитический сигнал:
Z(t) = Z s(t) + jZc(t), где Zs (t) синфазная, a Zc(t) - квадратурная составляющие сигнала. С выхода блока АЦП 1 цифровой отсчет сигнала Z(iTк), где Тк = 1/fк, поступает в фильтр-корректор 2. Отфильтрованный отсчет сигнала X (iТк) появляется на выходе фильтра-корректора 2 также с частотой fк. Блок задержки 3 представляет собой регистр, информация на выходе которого изменяется с частотой fк. На выход регистра, а следовательно и блока задержки 3, отсчет сигнала Х поступает с частотой f0t благодаря стробированию записи в регистр с частотой f0t. Тем самым осуществляется прореживание сигналов с фильтра-корректора 2. Отсчет сигнала Х(iТ0) поступает в блок синхронизации опорного колебания 4, который содержит цепь ФАПЧ с синусно-косинусным генератором и решающую схему. Частота генератора изменяется от f0c - Δ до f0c + Δ, где Δ определяет полосу захвата ФАПЧ и задается через установочный вход как параметр δ2, что эквивалентно заданию полосы пропускания фильтра петли ФАПЧ. После захвата по фазе ФАПЧ обеспечивает когерентное детектирование сигнала, при этом на выходах сумматоров 6 и 7 формируется огибающая сигнала Y(iТ0).
В решающей схеме блока синхронизации опорного колебания 4 по огибающей сигнала Y (iT0), являющейся сигналом оценки, определяется эталонный сигнал А(iT0). Операцию вынесения решения можно представить в виде
A(iTo) = arg m n
n YiT
YiT -A
-A , U =
, U =  где argmin f(x) - функция, принимающая значения аргумента Х, минимизирующего f(x);
где argmin f(x) - функция, принимающая значения аргумента Х, минимизирующего f(x);
А1-А4 - элементы ансамбля двукратной фазовой модуляции.
Таким образом решающая схема формирует сигнал оценки А(iT0) как ближайший по квадрату эвклидовой метрики к Y (iT0) элемент Аn. Затем в блоке синхронизации опорного колебания 4 определяется сигнал разности Еi= Y (iT0) - А(iT0) = εs + j εc, где εs - синфазная, а εс - квадратурная составляющие сигнала разности. С выхода блока синхронизации опорного колебания 4 сигнал Еi поступает в фильто-корректор 2 на подстройку коэффициентов до достижения минимума среднего значения Е2.
Блок тактовой синхронизации 5 содержит генератор колебаний с частотой квантования и цепь подстройки фазы момента квантования, работа которой описывается выражением
r(i) = r(i - 1) + γ {C1(i - 1) - C-1(i - 1)}, где r(i), r(i - 1) - оценка фазы момента квантования, вычисляемая на i и (i - 1) шагах подстройки;
С1(i - 1), C-1(i - 1) - значения коэффициентов фильтра-корректора 2, ближайших к центральному; γ - малое вещественное число.
Причем величина в фигурных скобках характеризует величину ошибки фазы момента квантования. Отсчеты С1(i - 1) и C-1(i - 1) поступают на вход блока тактовой синхронизации 5 с второго выхода фильтра-корректора 2. С выхода блока тактовой синхронизации 5 импульсы с частотой квантования поступают на входы блока АЦП 1 и делителя. Делитель на программируемом счетчике формирует на выходе импульсы с частотой f0t.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ КОМПЕНСАЦИИ УЗКОПОЛОСНЫХ ПОМЕХ В ЦИФРОВЫХ РАДИОСИСТЕМАХ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2013 |
|
RU2552850C2 |
| СПОСОБ МАГНИТНОЙ ВИДЕОЗАПИСИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2013023C1 |
| УСТРОЙСТВО ПРОСТРАНСТВЕННО-РАЗНЕСЁННОГО ПРИЁМА ЦИФРОВЫХ СИГНАЛОВ СИСТЕМ ПОДВИЖНОЙ РАДИОСВЯЗИ | 2020 |
|
RU2727710C1 |
| Когерентный приемник частотно-манипулированных радиосигналов с непрерывной фазой | 1990 |
|
SU1716615A1 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| Устройство для распознавания радиосигналов | 1987 |
|
SU1647603A1 |
| Многоканальное устройство приема сложных сигналов | 1989 |
|
SU1786664A1 |
| ЦИФРОВОЙ ПРИЕМНИК ДИСКРЕТНЫХ СИГНАЛОВ С "ВРАЩАЮЩЕЙСЯ ФАЗОЙ" | 1991 |
|
RU2038703C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ НЕСУЩЕЙ И ОПОРНОЙ ЧАСТОТ В КАНАЛЕ СВЯЗИ СО ЗНАЧИТЕЛЬНЫМИ ЧАСТОТНЫМИ НЕСТАБИЛЬНОСТЯМИ И ОГРАНИЧЕНИЯМИ НА ЭНЕРГЕТИКУ | 2010 |
|
RU2451408C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ НЕСТАБИЛЬНОСТИ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2006 |
|
RU2336650C2 |
Использование: электросвязь. Сущность изобретения: способ позволяет расширить класс корректируемых многопозиционных сигналов за счет коррекции сигналов с неизвестными тактовыми и несущими частотами, благодаря обеспечению независимости процесса коррекции от задания или изменения как несущей, так и тактовой частот передаваемого сигнала. 4 ил.
СПОСОБ АДАПТИВНОЙ КОРРЕКЦИИ МНОГОПОЗИЦИОННЫХ СИГНАЛОВ, включающий квантование сигнала по времени и уровню, преобразование его в сигнал цифровой информации, фильтрацию сигнала, измерение сигнала разности между сигналом оценки и эталонным сигналом, изменение коэффициентов фильтра корректора до достижения минимума среднего квадрата сигнала разности, отличающийся тем, что, с целью обеспечения коррекции сигналов с неизвестными тактовыми и несущими частотами, отфильтрованный сигнал прореживают с частотой fot , формируют опорный сигнал с частотой foc ± Δ , выделяют огибающий сигнал, являющимся сигналом оценки посредством когерентного детектирования прореженного сигнала, в качестве эталонного сигнала используют ближайший к сигналу оценки элемент ансамбля сигналов двухкратной фазовой модуляции и при формировании сигналов обеспечивают выполнение следующих соотношений:
f ;
;
f f
f +
+  , f
, f ;
;
f ,
,
Δ =  ax
ax  f
f + 0,5
+ 0,5 ;
;
fк = Nfot ≥ 2(Δf) ;
где fot - частота прореживания;
[T1 , ..., Tn] - наименьшее общее кратное совокупности тактовых интервалов передаваемых сигналов;
M и N - произвольные натуральные числа;
foc - опорная частота;
fic - несущая частота сигнала I-го вида,
max(˙) - операция определения максимального числа;
K - произвольное целое;
Δ - сдвиг опорной частоты;
fк - частота квантования;
Δ f - полоса частот корректируемого сигнала;
n - число различных тактовых частот передаваемых сигналов;
m - число различных несущих частот передаваемых сигналов.
| ВОЛНОВОДНЫЙ РАЗДЕЛИТЕЛЬНЫЙ ФИЛЬТР | 0 |
|
SU278898A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
