фиг.1
Изобретение относится к электротехнике и может быть использовано для управления электроприводом переменного тока.
Целью изобретения является повышение точности.
На фиг.1 приведена блок-схема устройства для управления электроприводом переменного тока; на фиг.2 - развернутая блок-схема устройства; на фиг.З - электрическая схема нелинейного звена; на фиг.4,5 - векторная диаграмма напряжений, формирующих входной сигнал нелинейного звена; на фиг.6 - временные диаграммы, поясняющие работу устройства.
Устройство для управления электропри- водом переменного тока в каждом канале содержит блок 1 обратной связи по току (фиг.1), блок 2 задания тока фазы, блок 3 выделения противоЭДС соответствующей фазы двигателя переменного тока, четырех- входовый сумматор 4, три входа которого соединены с выходами блоков 1-3, а выход- с входом блока 5 импульсно-фазового управления.
В устройство введены второй сумматор 6 и нелинейное звено 7. Входы сумматора 6 подключены к выходам блока 3 выделения противоЭДС данной фазы, например фазы А, и блока 8 выделения противоЭДС опережающей фазы, например фазы С. Выход сумматора 6 подключен к входу нелинейного звена 7, выходом соединенного с четвертым входом сумматора 4.
Данное устройство может быть использовано в составе структуры электро- привода переменного тока, построенного на базе асинхронного двигателя (фиг.2) с короткозамкнутым ротором, статорная обмотка асинхронного двигателя через непосредственный преобразователь частоты, выполненный в виде трех групп встречно- параллельно включенных тиристоров подключена к сети. Блок 1 обратной связи представляет собой датчик тока, включенный в цепь обмотки статора.
Блок 2 задания тока IA в фазе А включает в себя блок 9 умножения, сумматор 10, выход которого являетс к выходом блока 2.
Для формирования заданных значений ь и ic в фазах В и С используются блок 11 умножения, сумматор 12, два инвертора 13 и 14 и сумматоры 15 и 16, на выходах которых формируются токи 1ь и с.
Для формирования токов ia, Ib, Ic используются сигналы, поступающие с выхода формирователя 17 гармонических функций, поступающих на входы блоков 9,11, 18,19 умножения. Вторые входы блоков 9, 11 умножения связаны с выходом регулятора 20 скольжения, а вторые входы блоков 18, 19
умножения - с выходом задатчика 21 намагничивающего тока л . На вход регулятора 20 скольжения поступает сигнал, пропорциональный разности заданной (аз и измеренной о)р величин частоты вращения. Измерение частоты вращения осуществляется тахогенератором 22, установленным на валу асинхронного двигателя.
Формирование противоЭДС Ед в фазе А осуществляется блоком 23 умножения и инвертором 24, а формирование противоЭДС Еь, ЕС в фазах В и С осуществляется на выходах сумматоров 25, 26, одни входы которых соединены с выходом блока 23 умножения, второй вход сумматора 25 непосредственно, а второй вход сумматора 26 через инвертор 27 соединены с выходом блока 28 умножения, первые входы блоков 23, 28 умножения подключены к одному выходу формирователя 17 гармонических функций, вторые входы - к выходу сумматора 29, входы которых подключены к выходам регулятора 20 скольжения и тахогенератора 22.
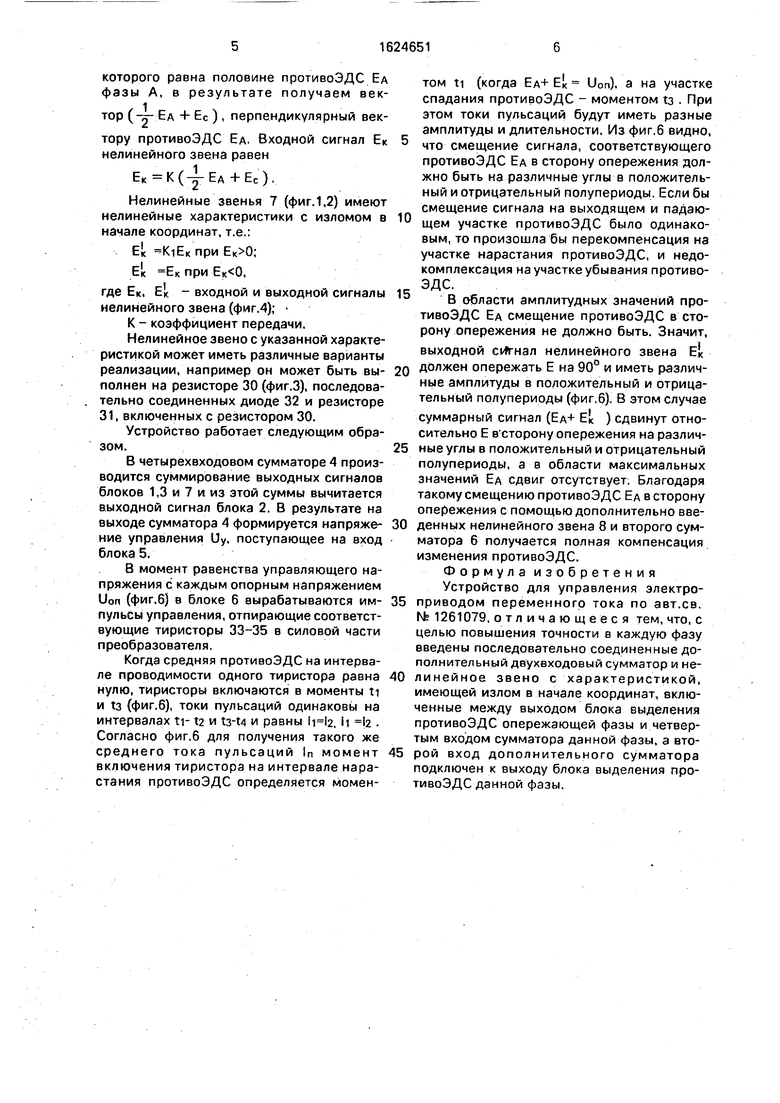
Согласно этой схеме коэффициент передачи К при равен к R2
Ri +R2
где Ri, R2 - величины резисторов 30, 31 нелинейного звена.
Регулятор 20 скольжения формирует сигнал задания (Os - la частоты скольжения, пропорциональный активной составляющей тока U статора. На выходе сумматора 29 формируется сигнал, пропорциональный частоте. С этой частотой формирователь 17 гармонических сигналов формирует на выходе два квадратурных синусоидальных сигнала. Блоки 9, 11 перемножения изменяют амплитуды этих сигналов пропорционально активной составляющей тока la, а блоки 18, 19 умножения - пропорционально реактивной составляющей. В сумматорах 10, 12 происходит суммирование активной и реактивной составляющих тока, сдвинутых одна относительно другой на 90°. Таким образом, на выходах сумматоров 10, 12 формируются два квадратурных сигнала, пропорциональных току статора. Один из этих токов является током задания в фазе А, а два других фазных тока задания ь и с получают путем векторного суммирования двух квадратурных сигналов в сумматорах 15,16.
Принцип формирования входного сигнала нелинейного звена для одного канала управления, например фазы А, поясняется диаграммой, представленной на фиг.5. Для этого вектор противоЭДС опережающей фазы Ее складывается с вектором, длина
которого равна половине противоЭДС Ед фазы А, в результате получаем вектор ( Ед + Ее ) , перпендикулярный вектору противоЭДС Ед. Входной сигнал Е нелинейного звена равен
ЕК К( + ЕС).
Нелинейные звенья 7 (фиг. 1,2) имеют нелинейные характеристики с изломом в начале координат, т.е.:
Ек KiEK при
ЕК ЕК при ,
it
где Ек, Ек - входной и выходной сигналы нелинейного звена (фиг.4);
К - коэффициент передачи,
Нелинейное звено с указанной характеристикой может иметь различные варианты реализации, например он может быть вы- полней на резисторе 30 (фиг.З), последовательно соединенных диоде 32 и резисторе 31, включенных с резистором 30.
Устройство работает следующим образом.
В четырехвходовом сумматоре 4 производится суммирование выходных сигналов блоков 1,3 и 7 и из этой суммы вычитается выходной сигнал блока 2. В результате на выходе сумматора 4 формируется напряже- ние управления Uy, поступающее на вход блока 5.
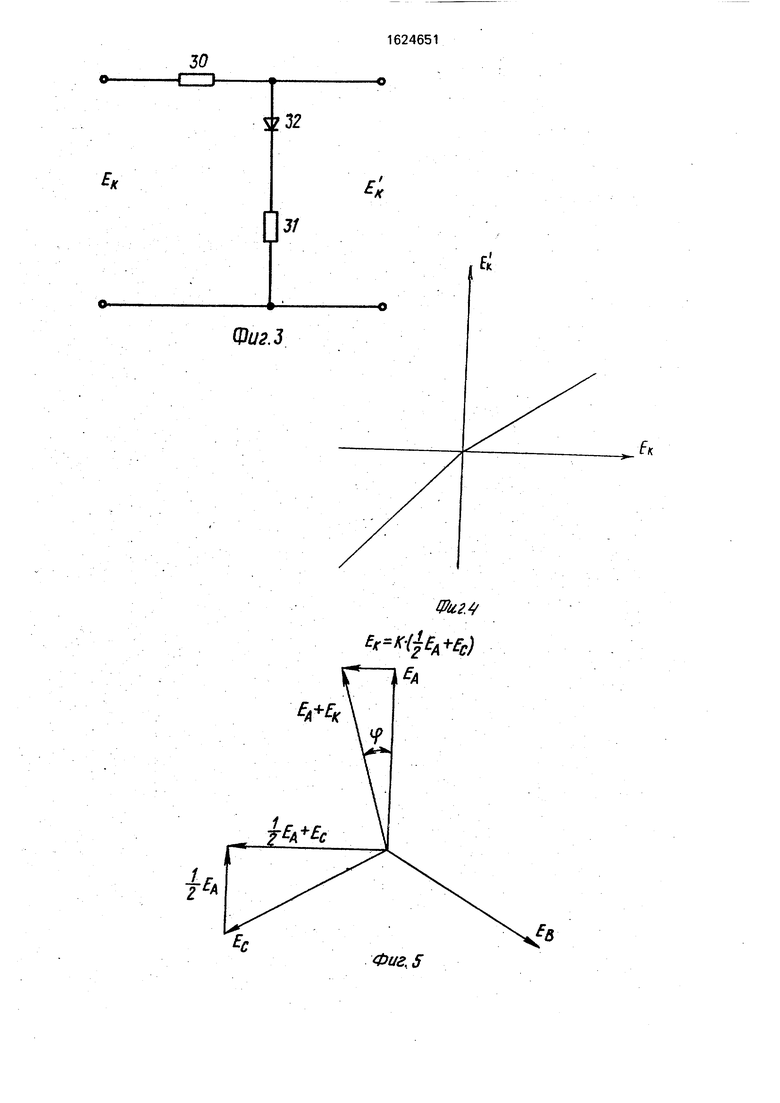
В момент равенства управляющего напряжения с каждым опорным напряжением Uon (фиг.б) в блоке 6 вырабатываются им- пульсы управления, отпирающие соответствующие тиристоры 33-35 в силовой части преобразователя.
Когда средняя противоЭДС на интервале проводимости одного тиристора равна нулю, тиристоры включаются в моменты ti и гз (фиг.б), токи пульсаций одинаковы на интервалах ti- г и t3-t4 и равны . И . Согласно фиг.б для получения такого же среднего тока пульсаций п момент включения тиристора на интервале нарастания противоЭДС определяется момен0
5
0
5
0
5
том ti (когда ЕА+ Ек U0n). а на участке спадания противоЭДС - моментом 1з . При этом токи пульсаций будут иметь разные амплитуды и длительности. Из фиг.б видно, что смещение сигнала, соответствующего противоЭДС ЕА в сторону опережения должно быть на различные углы в положительный и отрицательный полупериоды. Если бы смещение сигнала на выходящем и падающем участке противоЭДС было одинаковым, то произошла бы перекомпенсация на участке нарастания противоЭДС, и недо- комплексация на участке убывания противоЭДС.
В области амплитудных значений противоЭДС ЕА смещение противоЭДС в сторону опережения не должно быть. Значит,
выходной сиУнал нелинейного звена Ек должен опережать Е на 90° и иметь различные амплитуды в положительный и отрицательный полупериоды (фиг.б). В этом случае
суммарный сигнал (Ед+ Ек ) сдвинут относительно Е в сторону опережения на различные углы в положительный и отрицательный полупериоды, а в области максимальных значений ЕА сдвиг отсутствует. Благодаря такому смещению противоЭДС ЕА в сторону опережения с помощью дополнительно введенных нелинейного звена 8 и второго сумматора 6 получается полная компенсация изменения противоЭДС.
Формула изобретения Устройство для управления электроприводом переменного тока по авт.св. № 1261079. о т л и ч а ю щ е е с я тем, что, с целью повышения точности в каждую фазу введены последовательно соединенные дополнительный двухвходовый сумматор и не- линейное звено с характеристикой, имеющей излом в начале координат, включенные между выходом блока выделения противоЭДС опережающей фазы и четвертым входом сумматора данной фазы, а второй вход дополнительного сумматора подключен к выходу блока выделения противоЭДС данной фазы.
N
cvi
I
Ц
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом переменного тока | 1985 |
|
SU1261079A2 |
| Устройство для управления @ -фазным реверсивным вентильным преобразователем | 1989 |
|
SU1837378A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| ВЫСОКОВОЛЬТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ МОЩНОГО ЭЛЕКТРОДВИГАТЕЛЯ, ИМЕЮЩЕГО ОДНУ ИЛИ НЕСКОЛЬКО ТРЕХФАЗНЫХ ОБМОТОК (ЕГО ВАРИАНТЫ) | 2005 |
|
RU2295824C1 |
| Электропривод переменного тока | 1988 |
|
SU1539952A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Асинхронно-вентильный каскад | 1987 |
|
SU1603519A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |

Изобретение относится к электротехнике. Целью изобретения является повышение точности. С этой целью в устройство для управления электроприводом переменного тока в каждый канал управления введены сумматор 6 и нелинейное звено 7. Входы сумматора 6 подключены к выходам блоков выделения противоЭДС, например, фазы А и опережающей фазы С, а выход сумматора подключен к входу нелинейного звена 7. Выходом нелинейное звено подключено к четвертому входу сумматора 4. Нелинейное звено формирует сигнал, обеспечивающий полную компенсацию изменения противоЭДС на интервале проводимости тока вентилем преобразователя частоты в цепи статора асинхронного двигателя. 6 ил.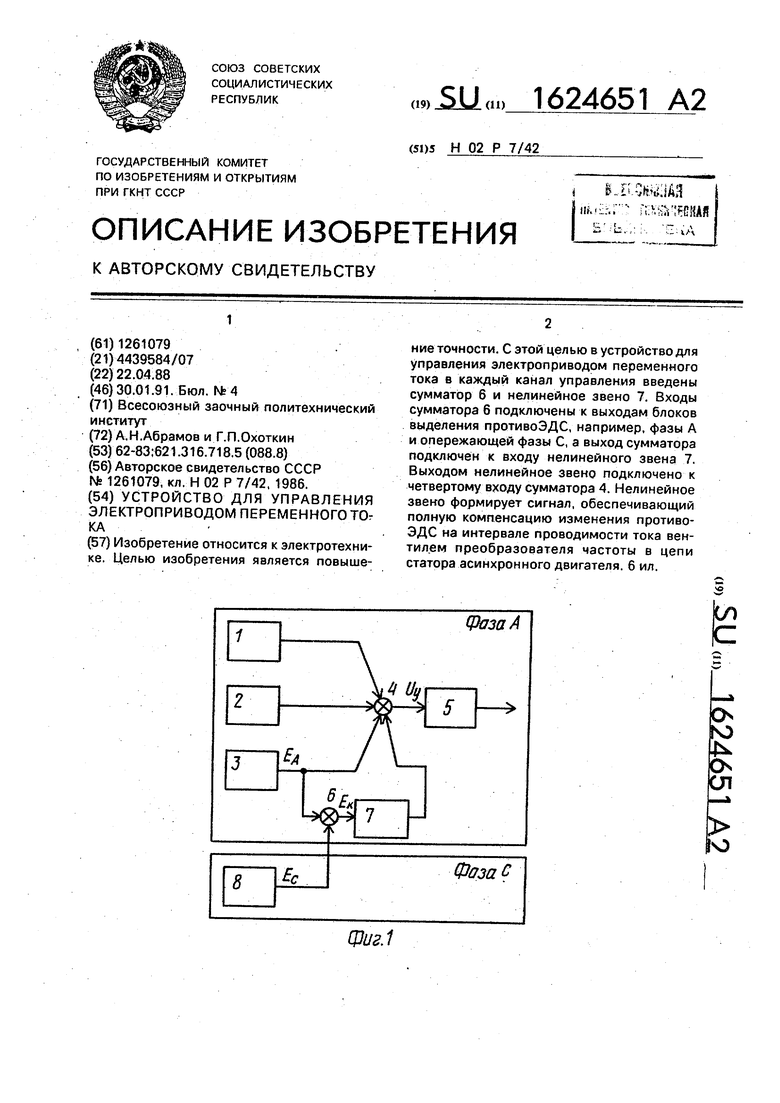
Фиг.З
Ъ+Ь
-
4fo24
b lfa+$) b
Фиг, 5
/
/
| Устройство для управления электроприводом переменного тока | 1985 |
|
SU1261079A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
