Изобретение относится к электротехнике и может быть использовано в асинхронных электроприводах подъемно-транспортных машин.
Цель изобретения - расширение диапазона частот вращения, в котором жесткость механической характеристики не зависит от величины нагрузки, и повышение надежности путем снижения бросков момента
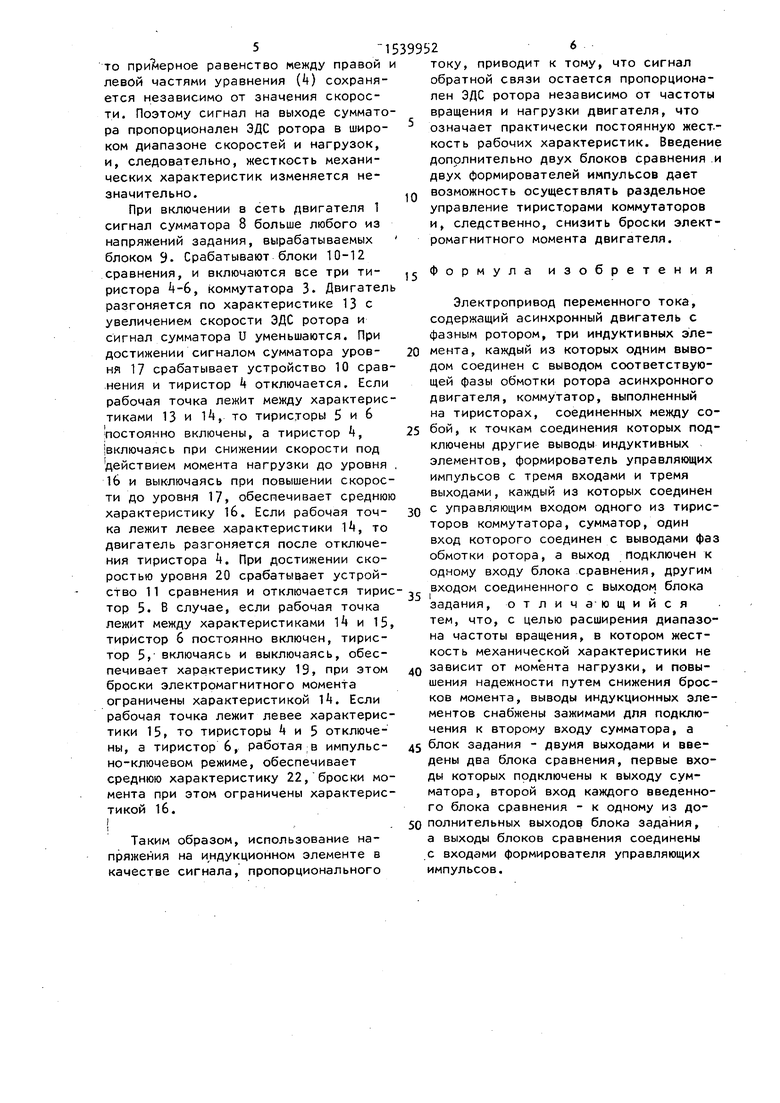
На фиг. 1 представлена блок-схема электропривода переменного тока; на фиг. 2 - механические характеристики.
Электропривод переменного тчока со- держит асинхронный двигатель 1 с фазным ротором, три индукционных элемента 2, коммутатор 3 выполненный на тиристорах k-б, соединенных между собой, например, в треугольник (тирис- торы могут быть соединены и по мостовой схеме). Одни выводы индуктивных элементов соединены с выводами соответствующих фаз обмотки ротора асинхронного двигателя 1, а другие выво- ды у индукционных элементов подключен к точкам соединения тиристоров 4-6. Управляющие электроды тиристоров k-6 подк рчены к выходам соответствующих формирователей 7 управляющих импуль- сов, выводы фаз обмотки ротора соединены с одним входом сумматора 8, второй вход которого подключен к выводам
О
Из этого уравнения (3) для того,
индукционных элементов 2. Электропривод содержит также блок 9 задания с , чтобы сигнал на выходе сумматора был тремя выходами, блоки 10-12 сравнения, первые входыокоторых соединены с выходом сумматора 8, а второй вход каждого блока сравнения подключен к соответствующему входу блока 9 задания 4д Выходы блоков сравнения подключены
прямо пропорционален ЭДС ротора необходимо выполнения условия
(4)
ЧзЧ,гэ kzz
г we4
Здесь
+
z... .-+ Х2
соответственно к входам формирователей 7.
На фиг. 2 введены следующие обозначения: 13 - механическая характеристика электродвигателя 1 при включении всех трех тиристоров; 14 - характеристика при включении двух тиристоров; 15 - характеристика при включении одного тиристора; 16 - величина задания , } 17 - уровен отключения блока 10 сравнения; 18 - уровень его включения; 19 - величина задания 20 - уровень отключения устройства 11 сравнения; 21 - уровень его включения; 22 - величина задания ; 23 - уровень отключени блока 12 сравнения; 2k - уровень его включения.
Электропривод работает следующим образом.
Блок 9 задания вырабатывает три напряжения задания U, , U , причем и U .
С роторной обмотки снимается сигнал, пропорциональный роторному напряжению:
k(Up лГз1 (Ет - IpZg), (I)
где kf - постоянный коэффициент; Up -линейное напряжение роторной обмотки;
Е - фазная ЭДС ротора; 1р - ток ротора; Z. - полное сопротивление фазы
ротора.
С индукционного сопротивления (ИС) снимается сигнал, пропорциональный падению напряжения на фазе ИС:
U«c У С .
(2)
де t U
k2 J«c
Z
ис
постоянный коэффициент; напряжение на фазной обмот - ке индукционного сопротивления;
полное сопротивление фазы ИС„ Сигнал на выходе сумматора
U k,Up + k2lb,,c - 1„2Э f 41 zwc. (3)
О
Из этого уравнения (3) для того,
тобы сигнал на выходе сумматора был
чтобы сигнал на выходе сумматора был
прямо пропорционален ЭДС ротора необходимо выполнения условия
(4)
ЧзЧ,гэ kzz
г we4
бы сиг
Здесь
чтобы сигнал на выходе сумматора был
+
z... .-+ Х2
Lp ис v-цс -м где Rp - «активное сопротивление ротора двигателя;
Х„ Р
реактивное сопротивление ротора при скольжение электродвигателя;
ис «с
0
5
- активное и реактивное сопротивления ИС, являющиеся нелинейными функциями скольжения и тока ротора. Из-за того, что и Z,, и Z зависят от скольжения электродвигателя, равенство и) строго выполняется только при одной скорости. Но так как зависимости 2Э и 2ИС от скольжения носят одинаковый характер - при уменьшении скольжения и Zg, и Z уменьшаются,
то примерное равенство между правой и левой частями уравнения (4) сохраняется независимо от значения скорости. Поэтому сигнал на выходе сумматора пропорционален ЭДС ротора в широком диапазоне скоростей и нагрузок, и, следовательно, жесткость механических характеристик изменяется незначительно.
При включении в сеть двигателя 1 сигнал сумматора 8 больше любого из напряжений задания, вырабатываемых блоком 9- Срабатывают блоки 10-12 сравнения, и включаются все три тиристора 4-6, коммутатора 3. Двигатель разгоняется по характеристике 13 с увеличением скорости ЭДС ротора и сигнал сумматора U уменьшаются. При достижении сигналом сумматора уровня 17 срабатывает устройство 10 сравнения и тиристор 4 отключается. Если рабочая точка лежит между характеристиками 13 и 14, то тиристоры 5 и 6 постоянно включены, а тиристор 4, включаясь при снижении скорости под действием момента нагрузки до уровня 16 и выключаясь при повышении скорости до уровня 17 обеспечивает среднюю характеристику 16. Если рабочая точка лежит левее характеристики 14, то двигатель разгоняется после отключения тиристора 4. При достижении скоростью уровня 20 срабатывает устройство 11 сравнения и отключается тиристор 5. В случае, если рабочая точка лежит между характеристиками 14 и 15, тиристор 6 постоянно включен, тиристор 5, включаясь и выключаясь, обеспечивает характеристику 19, при этом броски электромагнитного момента ограничены характеристикой 14. Если рабочая точка лежит левее характеристики 15, то тиристоры 4 и 5 отключены, а тиристор 6, работая в импульс- но-ключевом режиме, обеспечивает среднюю характеристику 22, броски момента при этом ограничены характеристикой 16.
i i
Таким образом, использование напряжения на индукционном элементе в качестве сигнала, пропорционального
39952
6
к тому,
10
15
току, приводит к тому, что сигнал обратной связи остается пропорционален ЭДС ротора независимо от частоты вращения и нагрузки двигателя, что означает практически постоянную жесткость рабочих характеристик. Введение дополнительно двух блоков сравнения и двух формирователей импульсов дает возможность осуществлять раздельное управление тиристорами коммутаторов и, следственно, снизить броски электромагнитного момента двигателя.
Формула изобретения
0
5
0
0
Электропривод переменного тока, содержащий асинхронный двигатель с фазным ротором, три индуктивных элемента , каждый из которых одним выводом соединен с выводом соответствующей фазы обмотки ротора асинхронного двигателя, коммутатор, выполненный на тиристорах, соединенных между собой, к точкам соединения которых подключены другие выводы индуктивных элементов, формирователь управляющих импульсов с тремя входами и тремя выходами, каждый из которых соединен с управляющим входом одного из тиристоров коммутатора, сумматор, один вход которого соединен с выводами фаз обмотки ротора, а выход подключен к одному входу блока сравнения, другим входом соединенного с выходом блока задания, отлича-ющийся тем, что, с целью расширения диапазона частоты вращения, в котором жесткость механической характеристики не зависит от момента нагрузки, и повышения надежности путем снижения бросков момента, выводы индукционных элементов снабжены зажимами для подключения к второму входу сумматора, а
5 блок задания - двумя выходами и введены два блока сравнения, первые входы которых подключены к выходу сумматора , второй вход каждого введенного блока сравнения - к одному из до0 полнительных выходов блока задания, а выходы блоков сравнения соединены с входами формирователя управляющих импульсов.
5 i
/J 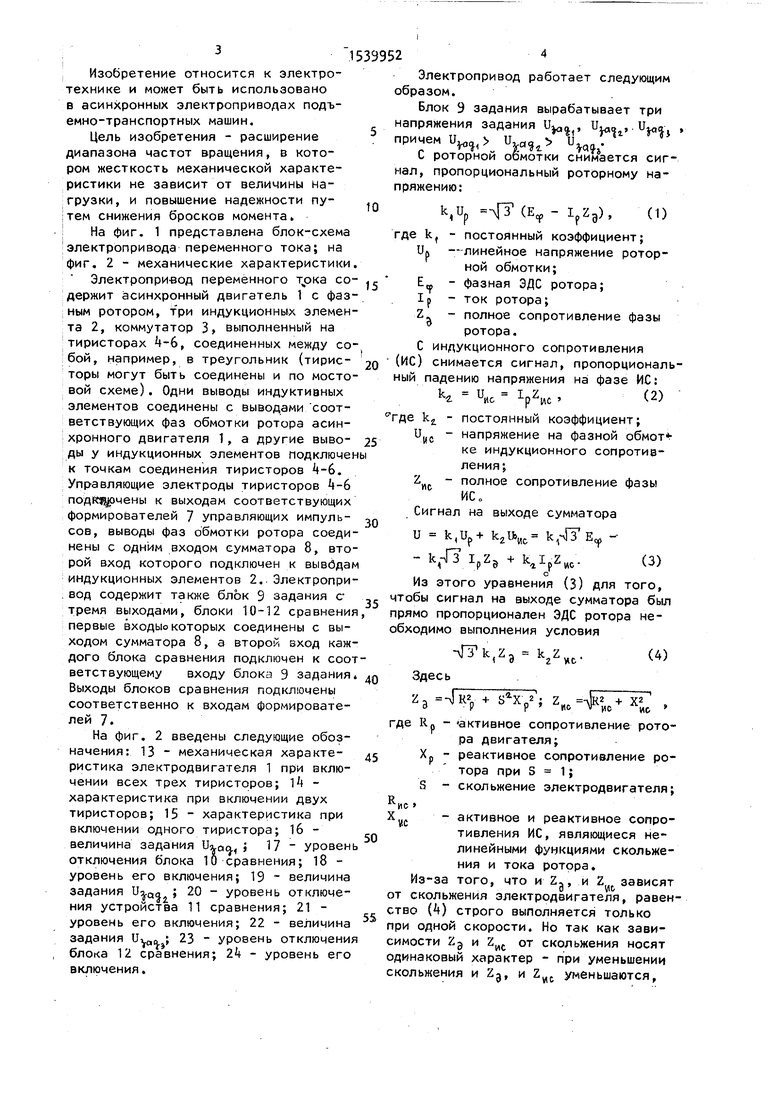
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тормозным режимом электропривода на базе асинхронного двигателя с подмагничиваемым индукционным реостатом в цепи ротора | 1983 |
|
SU1135000A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1978 |
|
SU698106A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1983 |
|
SU1131010A1 |
| Электропривод переменного тока | 1979 |
|
SU847480A1 |
| Электропривод переменного тока | 1988 |
|
SU1615856A1 |
| Электропривод переменного тока | 1989 |
|
SU1704262A1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| Электропривод | 1985 |
|
SU1332427A1 |
Изобретение относится к электротехнике и может быть использовано в асинхронных электроприводах подъемно-транспортных машин. Целью изобретения является расширение диапазона частот вращения, в котором зависимость жесткости механических характеристик не зависит от величины нагрузки повышения надежности путем снижения бросков момента. Электропривод переменного тока содержит индукционные элементы 2 и тиристорный коммутатор 3, включенные в цепь ротора асинхронного двигателя 1. Сигнал обратной связи является суммой напряжения на роторе двигателя и падения напряжения на индукционном элементе 2. Блок задания 9 формирует три напряжения, которые сравниваются с сигналом обратной связи на одном из блоков сравнения 10-12. В зависимости от соотношения сигнала обратной связи и напряжений задания осуществляется управление тиристорами 4-6 коммутатора. При этом один из тиристоров работает в импульсно-ключевом режиме, а остальные включены или выключены. 2 ил.
Ала
| Устройство для регулирования частоты вращения асинхронного двигателя | 1979 |
|
SU860252A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР Vf 1179509, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
