Изобретение относится к механизированной сборке ответственных резьбовых соединений и может быть использовано в различных отраслях машиностроения.
Известно устройство для сборки резьбовых соединений, содержащее основание, опорную плиту, установленный между ними торсион, шпиндель с ключом, пневмодвигатель с планетарным редуктором, выходной вал которого жестко связан со шпинделем, механизм отключения пневмодвигателя, выполненный в виде дифференциала, одно центральное колесо которого закреплено на шпинделе, а другое центральное колесо выполнено с гнездом на торце под шарики, взаимодействующие с основанием, устройство снабжено шестерней, жестко связанной с венцовой шестерней планетарного редуктора и закрепленной своей ступицей на шпинделе, на которой установлено центральное колесо с гнездом с возможностью осевого перемещения на величину выступающей части шариков, конечным выключателем торсиона и зубчатым колесом, закрепленным на торсионе и взаимодействующим с шестерней, а водило дифференциала имеет регулируемый упор, установленный по отношению к конечному выключателю на угол, соответствующий заданному моменту затяжки резьбового соединения (см. авт. св. СССР 876410 от 30.10.81, бюл. 40 "Устройство для сборки резьбовых соединений").
Недостатком данного устройства является использование в основе работы механизма отключения полярной системы координат с неподвижной осью - основанием устройства, что даже с поправкой в конечный момент затяжки в зависимости от коэффициентов трения резьбового соединения, устройство не обладает достаточной точностью достижения необходимой осевой силы затяжки и лишено возможности контролируемой затяжки до состояния текучести болта. Отсутствие постоянной кинематической связи звеньев дифференциала снижает технологические возможности устройства. Цель изобретения - повышение точности путем контроля затяжки резьбового соединения до состояния текучести болта.
Поставленная цель достигается тем, что гайковерт содержит корпус, размещенные в нем планетарный редуктор с центральными зубчатыми колесами с наружными и внутренними зубьями, кинематически связанными сателлитами водила, привод с выходным валом, жестко связанным с центральным зубчатым колесом с наружными зубьями, торсион в виде динамометра, зубчатый шток которого кинематически связан с шестерней, закрепленной на ступице центрального зубчатого колеса с внутренними зубьями, крутильная жесткость которого задана пружиной, поджимающей зубчатый шток, шпиндель с головкой под ключ, кинематически связанный передачей смещения с водилом, механизм отключения привода с конечным выключателем, выполненный в виде коаксиально установленных на противоположном головке под ключ конце шпинделя сигнализатора затяжки, фрикционно связанного с ним, и зубчатого водила с возможностью поворота на шпинделе, зубчатое водило кинематически связано с шестерней и снабжено двумя ограничительными пальцами для взаимодействия с сигнализатором, ступица которого со ступицей зубчатого водила образуют винтовую пару, с относительным осевым движением в пределах угла поворота сигнализатора между ограничительными пальцами, достаточным для срабатывания конечного выключателя, установленного по оси шпинделя и предназначенного для взаимодействия с сигнализатором, а передача смещения шпинделя представляет собой передачу внутреннего зацепления.
На фиг.1 изображена кинематическая схема гайковерта;
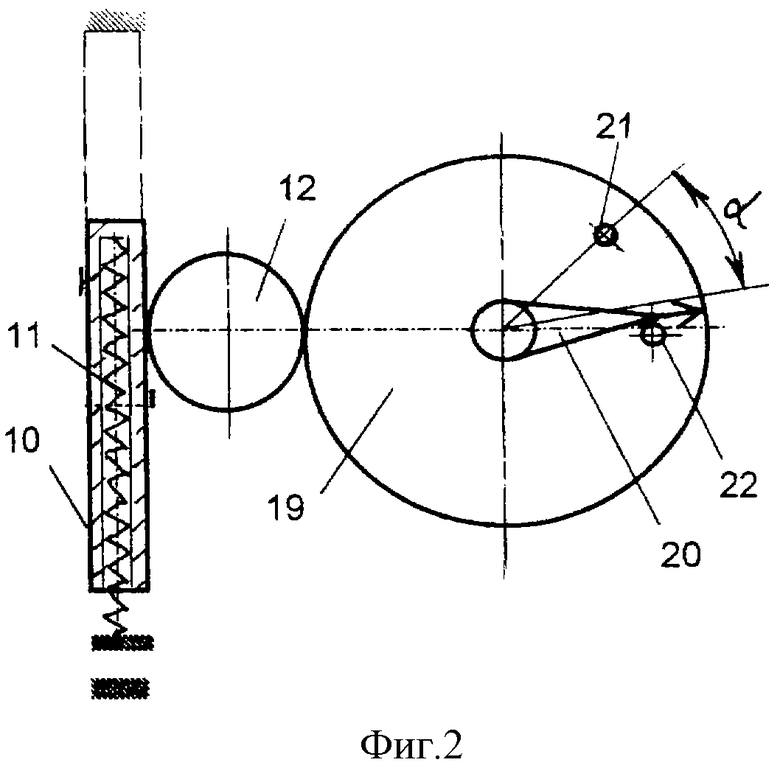
на фиг.2 изображена схема звеньев механизма отключения привода в момент окончания затяжки резьбового соединения до требуемого состояния текучести болта;
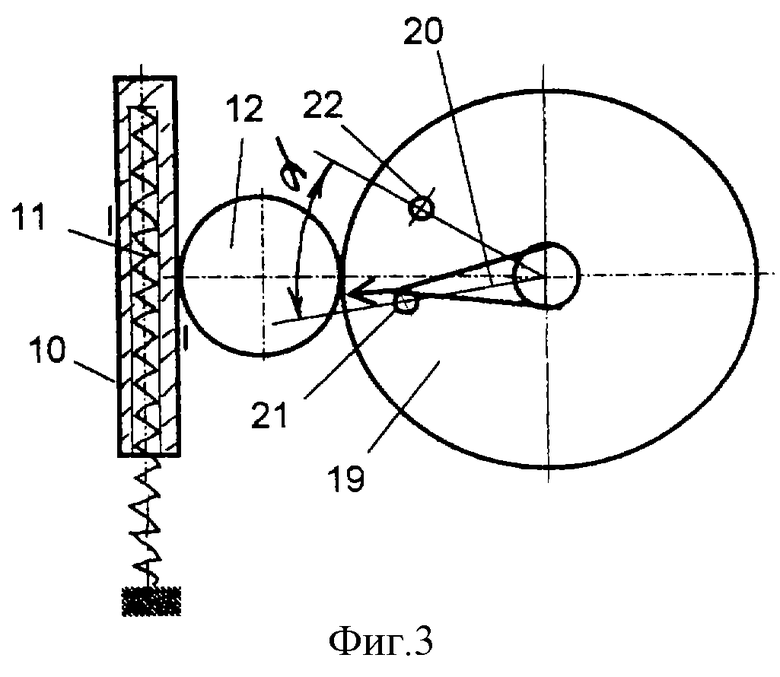
на фиг.3 изображена схема звеньев механизма отключения привода в период затяжки резьбового соединения при упругих деформациях болта;
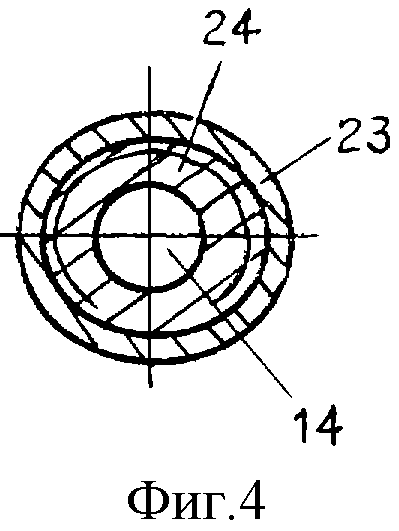
на фиг.4 изображено радиальное сечение винтовой пары сигнализатора и зубчатого водила.
Гайковерт содержит корпус 1, размещенные в нем планетарный редуктор 2 с центральными зубчатыми колесами 3 и 4 с наружными и внутренними зубьями, кинематически связанными сателлитами 5 водила 6, привод 7 с выходным валом 8, который жестко связан с центральным зубчатым колесом 3 с наружными зубьями. Реактивный момент при нагрузке в кинематической цепи гайковерта воспринимается торсионом в виде динамометра 9, зубчатый шток 10 которого поджат пружиной 11 и кинематически связан с шестерней 12, закрепленной на ступице 13 центрального зубчатого колеса 4 с внутренними зубьями.
Шпиндель 14 гайковерта имеет головку 15 под ключ и кинематически связан передачей смещения с водилом 6. Передача смещения представляет собой передачу внутреннего зацепления, у которой зубчатое колесо 16 с наружными зубьями закреплено на водиле 6, а зубчатое колесо 17 с внутренними зубьями закреплено на шпинделе 14.
Механизм отключения привода содержит конечный выключатель 18, установленный по оси шпинделя и выполненный в виде коаксиально установленных на противоположном головке 15 под ключ конце шпинделя 14 зубчатого водила 19, с возможностью поворота на нем, и фрикционно связанного со шпинделем 14 сигнализатора 20 затяжки. Зубчатое водило 19 кинематически связано с шестерней 12 и снабжено двумя ограничительными пальцами 21 и 22 для взаимодействия с сигнализатором 20, ступица 23 которого со ступицей 24 зубчатого водила 19 образуют винтовую пару, с относительным осевым движением в пределах угла α поворота сигнализатора 20 между ограничительными пальцами 21 и 22. Осевое движение сигнализатора 20 должно быть достаточным (не менее хода) для срабатывания конечного выключателя 18 и предназначенного для взаимодействия с сигнализатором 20.
Крутильная жесткость зубчатого колеса 4 с внутренними зубьями планетарного редуктора, задаваемая пружиной 11 динамометра 9, подбирается таким образом, чтобы в период упругих деформаций болта угол поворота зубчатого водила 19 по отношению к шпинделю имел положительные приращения, а в период состояния текучести болта отрицательные приращения.
Фрикционная связь сигнализатора 20 и шпинделя 14 может быть выполнена из размещенного в сигнализаторе 20, поджатого пружиной 25 шарика 26 и контактирующего с образующей поверхностью диаметра шпинделя 14.
Регулирование затяжки может производится изменением относительного положения ограничительных пальцев 21 и 22, регулировкой положения конечного выключателя 18 вдоль оси шпинделя, регулировкой усилия динамометра.
Гайковерт работает следующим образом.
Гайковерт головкой 15 под ключ устанавливается на крепеж резьбового соединения. Включается привод 7 гайковерта. Вращение вала 8 привода 7 через планетарный редуктор 2 и передачу смещения с зубчатыми колесами 16 и 17 передается шпинделю 14 с головкой 15 под ключ. Происходит навинчивание и предварительная затяжка резьбового соединения, при этом звенья механизма отключения привода находятся в состоянии покоя, так как пружина 11 динамометра 9, находясь в предварительном поджатии, не позволяет повернуться зубчатому водилу 19, а сигнализатор 20 удерживается ограничительным пальцем 22. Шпиндель 14 поворачивается относительно сигнализатора по фрикционнной связи.
При достижении затяжки, составляющей 40-80% от номинальной величины, начинается дифференциальный режим работы звеньев гайковерта. В этом случае каждому приращению поворота шпинделя 14 соответствует вполне определенная величина поворота зубчатого колеса 4 с шестерней 12 в реактивном направлении, при нагружении пружины 11 динамометра 9 за счет кинематической связи шестерни 12 и зубчатого штока 10. Кинематически связанное с шестерней 12 зубчатое водило 19 поворачивается в направлении вращения шпинделя 14 с положительным приращением угла поворота по отношению к сигнализатору 20 и шпинделю 14, и пальцем 21 начинает вести за собой сигнализатор 20. В этом относительном положении сигнализатора и зубчатого водила контакты конечного выключателя 18 разомкнуты за счет нижнего положения сигнализатора 20 в винтовой паре.
В условиях пластических деформаций болта (состояние текучести) жесткость резьбового соединения уменьшается, и зубчатое водило 19 получает по отношению к шпинделю отрицательное приращение угла поворота. Происходит отставание по вращению зубчатого водила 19 от сигнализатора 20, вращаемого шпинделем за счет фрикционной связи, который поворачивается в пределах относительного угла α между ограничительными пальцами, перемещается в осевом направлении (вверх), набирая достаточный ход для срабатывания конечного выключателя 18. При удобопреемлемом недобеге или максимум контакте сигнализатора 20 с ограничительным пальцем 22 зубчатого водила 19 происходит замыкание контактов конечного выключателя 18 и выключение привода 7, так как ход шпинделя в пределах угла α при дифференциальном режиме работы гайковерта позволяет передать в резьбовое соединение энергию для достижения заданной осевой силы затяжки (достижение состояния текучести).
Далее под действием усилия пружины 11 динамометра 9 зубчатый шток 10 своим осевым усилием заставляет вернуться всем звеньям механизма отключения в исходное положение.
Планетарный редуктор в этом случае работает как мультипликатор при заторможенном шпинделе с уводом энергии, накопившейся в системе гайковерта, в направлении обесточенного двигателя.
Головка 15 под ключ гайковерта 7 снимается с резьбового соединения и при ее установке на новое резьбовое соединение цикл затяжки повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический гайковерт | 1990 |
|
SU1743838A1 |
| Электромеханический гайковерт | 1990 |
|
SU1805024A1 |
| Устройство для сборки резьбовых соединений | 1980 |
|
SU876410A1 |
| Гайковерт | 1989 |
|
SU1705060A1 |
| Электромеханический гайковерт | 1991 |
|
SU1825725A1 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1994 |
|
RU2081741C1 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1998 |
|
RU2182533C2 |
| Гайковерт | 1989 |
|
SU1685698A1 |
| Устройство для сборки резьбовых соединений | 1989 |
|
SU1669703A1 |
| Гайковерт | 1987 |
|
SU1521574A1 |
Изобретение относится к механизированной сборке ответственных резьбовых соединений и может быть использовано в различных отраслях машиностроения. В заявленном гайковерте механизм отключения привода выполнен в виде коаксиально установленных на противоположном головке под ключ конце шпинделя сигнализатора затяжки, фрикционно связанного с ним, и зубчатого водила, с возможностью поворота на шпинделе, причем зубчатое водило кинематически связано с шестерней и снабжено двумя ограничительными пальцами для взаимодействия с сигнализатором, ступица которого со ступицей зубчатого водила образуют винтовую пару с относительным осевым движением в пределах угла поворота сигнализатора между ограничительными пальцами, достаточным для срабатывания конечного выключателя, установленного по оси шпинделя и предназначенного для взаимодействия с сигнализатором, а передача смещения шпинделя представляет собой передачу внутреннего зацепления. В результате, благодаря контролю затяжки резьбового соединения, повышается точность операций. 4 ил.
Гайковерт, содержащий корпус, размещенные в нем планетарный редуктор с центральными зубчатыми колесами с наружными и внутренними зубьями, кинематически связанные сателлитами водила, привод с выходным валом, связанный с центральным зубчатым колесом с наружными зубьями, торсион в виде динамометра, зубчатый шток которого кинематически связан с шестерней, закрепленной на ступице центрального зубчатого колеса с внутренними зубьями, крутильная жесткость которого задана пружиной, поджимающей зубчатый шток, шпиндель с головкой под ключ, кинематически связанный передачей смещения с водилом, и механизм отключения привода, содержащий конечный выключатель, отличающийся тем, что механизм отключения привода выполнен в виде коаксиально установленных на противоположном головке под ключ конце шпинделя сигнализатора затяжки, фрикционно связанного с ним, и зубчатого водила, с возможностью поворота на шпинделе, причем зубчатое водило кинематически связано с шестерней и снабжено двумя ограничительными пальцами для взаимодействия с сигнализатором, ступица которого со ступицей зубчатого водила образуют винтовую пару с относительным осевым движением в пределах угла поворота сигнализатора между ограничительными пальцами, достаточным для срабатывания конечного выключателя, установленного по оси шпинделя и предназначенного для взаимодействия с сигнализатором, а передача смещения шпинделя представляет собой передачу внутреннего зацепления.
| Устройство для сборки резьбовых соединений | 1980 |
|
SU876410A1 |
| Электромеханический гайковерт | 1978 |
|
SU956267A1 |
| Электромеханический гайковерт | 1988 |
|
SU1565669A2 |
| ЦИФРОВОЙ ДИНАМОМЕТРИЧЕСКИЙ КЛЮЧ | 1991 |
|
RU2015868C1 |

