w
I00
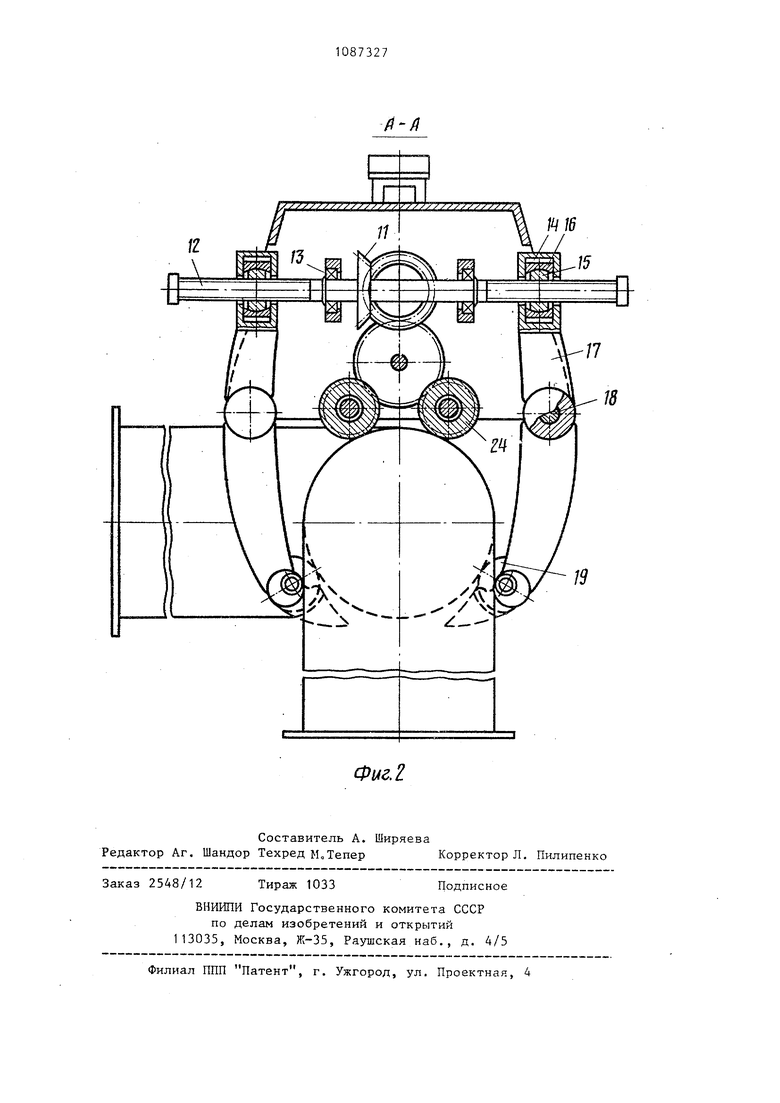
:о Изобретение относится к захватным устройствам, предназначенным для использования в качестве оснастки технологических манипуляторов трубозаготовительного производства в судостроении, и может быть применено при автоматизации механосборочных работ в машиностроении и других отраслях промышленности. Известен схват манипулятора, содержащий корпус, базирующие элементы в виде опорных роликов, зажимной элемент в виде бесконечной эластичной ленты, привод поступательногодвижени ленты со шкивом, привод вращательного движения роликов ll . Недостатком известного схвата являются ограниченные технологические возможности из-за невозможности захвата деталей типа труб с погибами, имеющих на концах фланцы. Целью изобретения является расширение технологических возможностей захвата. Поставленная цель достигается тем, что схват манипулятора, содерж щий корпус, базирзтощие ролики, зажим ные элементы, включающие рычаги с опорными роликами и реверсивный привод, кинематически связанный с базирующими .роликами и зажимными элементами, снабжен планетарным диф ференциальным механизмом и стопором установленным в корпусе с возможностью периодического взаимодействия с выходным звеном дифференциального механизма, которое кинематически связано с базирующими роликами, при этом другое звено кинематически связано с зажимными элементами, а ведущее звено дифференциального механизма связано с реверсивным приводом. Такая конструкция схвата позволя осуществлять захват труб с погибами и тогда,когда концы труб не свободны например с концевой арматурой, а также вращать трубу в схвате при осмотре и металлизации. Предлагаемый схват имеет более простую конструкцию за счет осущест ления операций захвата, зажима вращения и стопорения от вращения переключением одного привода. На фиг. 1 представлен схват манипулятора; на фиг. 2 - разрез А-А на фиг. 1. Схват состоит из корпуса 1, реве сивного привода 2, планетарного дифференциального механизма (позицией не обозначен), содержащего солнечную шестерню 2, сателлиты 4, установленные с возможнт:тью вращения на осях 5 в водиле 6, зубчатый венец 7, имеющий зубчатые нарезки Б и В. На выходном валу (позицией не обозначен) привода 2 закреплено коническое колесо 8, входящее в зацепление с коническим колесом 9, жестко соединенным с солнечной шестерней 3. Водило 6 жестко соединено с коническим колесом 10, входящим в зацепление с коническим колесом 11, жестко закрепленным на ходовом винте 12, установленном на подшипниках 13 в корпусе 1 и имеющем левую и правую самотормозящиеся резьбы, сопряженные с гайками 14. Гайки 14 закреплены шарнирно в ползунах 15, расположенных в пазах 16 на концах губок 17, установленных на осях 18 в корпусе 1. На других концах губок 17 установлены с возможностью вращения опорные ролики 19. Зубчатый венец 7 установлен на подшипниках 20 в корпусе 1 и жестко соединен с цилиндрическим колесом 21, входящим в зацепление через паразитное колесо 22 с зубчатыми колесами 23, жестко соединенными с базирующими роликами 24. Базирующие ролики 24 установлены с возможностью вращения на осях 25, закрепленных в корпусе 1. На корпусе 1 установлен стопор 26, входящий в зацепление с зубчатой нарезкой В, выполненной на наружной поверхности ступицы венца 7. Позищйй 27 обозначена обрабатываемая труба. Схват.работает следующим образом. При разведенных губках 17 схват подводится к прямолинейному .участк,у трубы 27 с погибами и фланцами на концах, находящейся в контейнере (не показан). Стопор 26 вводится в зацепление с зубчатой нарезкой В и стопорит венец 7 на корпусе 1. При включении правого вращения реверсивного привода 2 движениеойередается через конические колеса 8 и 9 солнечной шестерне 3 и сателлитам 4, которые, обкатываясь по неподвижному венцу 7, передают йращение водилу 6, коническим колесам-10 и 11 и ходовому винту 12. Вращение ходового винта 12 преобразуется в поступательное перемещение гаек 14 и поворот губок 17 вокруг осей 18, при этом ползуны 15 перемещаются в пазах 16. При поворо губок 17 происходит схват трубы 27 ее прижатие опорными роликами 19 к базирующим роликам 24. Захваченну трубу 27 переносят из контейнера в рабочую зону. Для ориентации трубы 27 с погибами в пространстве при установке ее на технологическое оборудование, а также при металлизации поверхност трубы 27 и осмотре производят ее вращение в захвате-вращателе. Для этого стопор 26 выводят из зацеплен с зубчатой нарезкой В, при зтом сам тормозящаяся нарезка винта 12 не позволяет перемещаться гайкам 14 и поворачиваться губкам 17 вокруг осей 18, что сохраняет силу прижати трубы 27 к базирующим роликам 24. При включении правого вращения реверсивного привода 2 движение передается через конические колеса 8 и 9 солнечной шестерне 3 и через сателлиты 4 венцу 7. Водило 6 при этом неподвижно, так как кинематическая цепь, приводимая в движение при вращении водила; 6, остановлена усилиями зажатия трубы 27. Вращение венца 7 передается чере зубчатые колеса 21 и 22 колесу 23 вместе с базирующими роликами 24. За счет сил трения между роликами 24 и трубой 27 вращение от роликов передается трубе 27. По окончании вращения трубы 27 стопор 26 вводитс в зацепление с зубчатой нарезкой В что стопорит кинематическую цепь вращения базирующих роликов 24 и предотвращает самопроизвольный повор трубы 27 в обратном направлении. Разжатие губок 17 и разгрузка трубы 27 из схвата производятся при введенном в зацепление с зубчатой нарезкой В стопора 26 и левом вращении реверсивного привода 2, при этом движение губок 17 передается через конические колеса 8 и 9 солнечной шестер не 3 и сателлитам 4, которые, обкатываясь по неподвижному венцу 7, передают вращение водилу 6.коническим колесам 10 и 11 и ходовому винту 12. Вращение ходового винта 12 преобразуется в поступательное перемещение гаек 14 и поворот губок 17 вокруг осей 18. Таким образом, предлагаемый цхват по сравнению, с известным имеет более широкие технологические возможности, так как позволяет осуществлять схват труб с погибами со стеллажа или контейнера, когда концы трубы не свободны, а также вращение эт.их труб в схвате. Кроме того, схват имеет более простую конструкцию за счет осуществ- ления операций зажима, вращения, стопорения от вращения труб переключет нием одного привода. Использование предлагаемого схвата позволяет снизить трудоемкость обработки одной трубы за счет сокращения времени на захват трубы, находящейся в любом положении, без вспомогательных операций, механизации зажима труб и их вращения при осмотре. Годовой экономический эффект от использования предлагаемого схвата манипулятора в отрасли составит более 20 тыс.руб. за счет снижения трудоемкости на обработку одной трубы. .3 -Н wzozi 6 .1 2В I 14
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1094734A1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| Зажимное устройство для токарного станка | 1983 |
|
SU1127696A1 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор | 1988 |
|
SU1593944A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| МОСТ С ЦИЛИНДРИЧЕСКОЙ ГЛАВНОЙ ПЕРЕДАЧЕЙ В ХОДОВОЙ ЧАСТИ | 2023 |
|
RU2811589C1 |

СХВАТ МАНИПУЛЯТОРА, содержащий корпус, базирующие ролики, зажимные элементы, включающие рычаги с опорными роликами и реверсивный привод, кинематически связанньй с базирующими роликами и зажимными элементами, отличающийся тем, что, с целью расширения технологических возможностей схвата, он снабжен планетарным дифференциальным механизмом и стопором, установленным в корпусе с возможностью периодического взаимодействия с одним из выходных звеньев дифференциального механизма, которое кинематически связано с базирующими роликами, при этом другое звено кинематически связано с зажимными элементами, а ведущее звено дифференциального механизма связано с реверсивным приводом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1977 |
|
SU673420A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
