Изобретение относится к машиностроению, а именно к захватным устройствам руки промышленных роботов или манипуляторов.
Цель изобретения - упрощение конструкции и уменьшение габаритов.
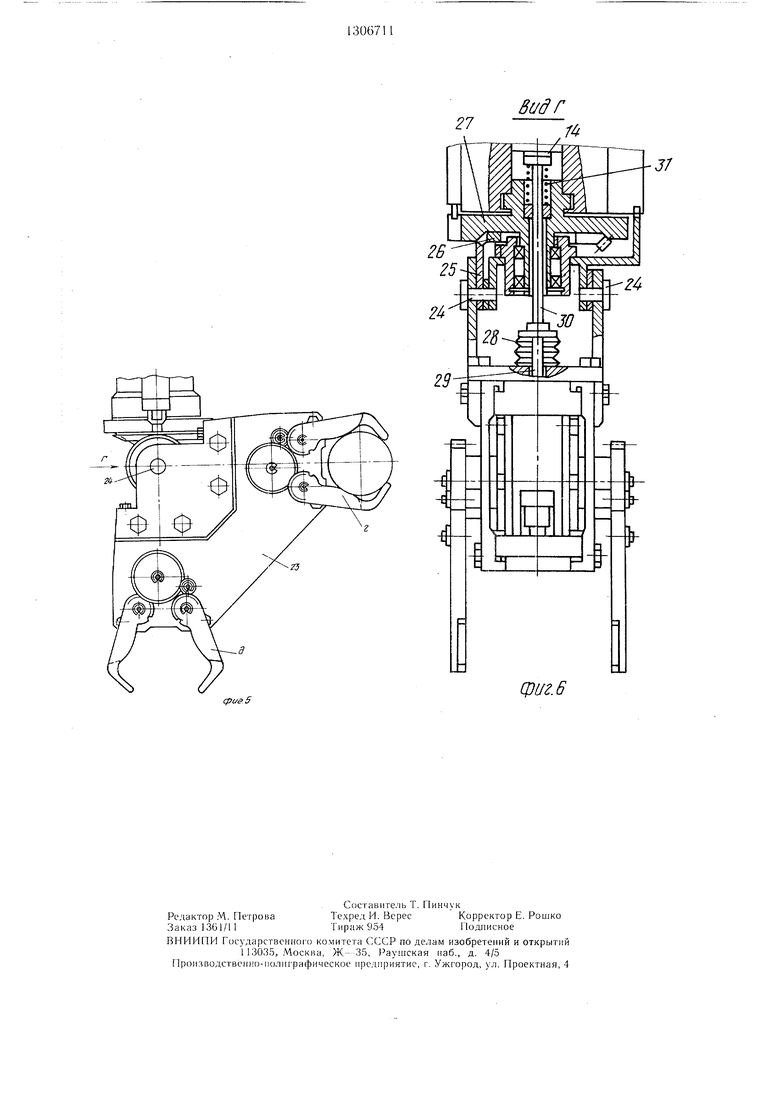
На фиг. 1 изображено захватное устройство манипулятора, обш,ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 3; на фиг. 5 - пример выполнения захватного устройства манипулятора двухпозиционным; на фиг. 6 - вид Г на фиг. 5.
Захватное устройство манипулятора состоит из корпуса 1, выполненного из боковин 2 и 3 и понеречин 4 и 5, скрепленных болтами. Внутри корпуса установлен дифференциальный механизм 6, выполненный из боковин 7 и 8, соединенных с водилом 9, имеюш,им сектор зубьев а внутреннего зацепления, контактирующий с промежуточным зубчатым колесом 10, которое совместно с упорными втулками 11 одето на ось 12. Последняя пропущена через радиальные пазы б боковин 7 и 8 дифференциала и закрепле 1а в боковинах 2 и 3 корпуса. Зубчатое колесо 10 взаимодействует с зубчатой рейкой 13, соединенной верхним концом с тягой 14 руки манипулятора. Нижний конец рейки 13 своим отверстием взаимодействует с пальце.м 15, закреплённым в бобышке ноперечины 4 корпуса. Для тяги 14 с рейкой 13 и для бобышки пальца 15 водило 9 имеет кольцевые пазы в. В отверстии водила закреплена ось 16, на которой может свободно вран;аться сателлит 17, ко1ггактируюп 1ий с центральными зубчатыми колесами 18, на хвостовиках которых закренлень зубчатые колеса 19, контактирующие с зубчаты.м сектором губки 20 и с нромежуточным зубчатым колесом 21, которое контактирует с зубчатым сектором губки 22. Губки 20 и 22 и промежуточное зубчато е колесо 21 свободно сидят на осях, закрепленных в боковинах 2 и 3 корпуса. Корпус 1 крепится к фланцу руки 23 манипулятора.
Захватное устройство манипулятора работает следующим образом.
В момент, когда тяга 14 перемещает рейку 13 вниз, манипулятор берет заготовку. Зубчатое колесо 10 поворачивает водило 9 до упора в поверхность нонере- чины 4 корпуса и сателлит 17, как клин, вращает центральные зубчатые колеса 18, а с ними и зубчатые колеса 9. Губки 20 и 22 раскрываются. Затем тяга 14 перемещает рейку 13 вверх, все. врап1,ения повторяются в обратном нанравленни, и губки 20 и 22 закрываются до упора в поверхность заготовки. При ступенчатой поверхности заготовки пара губок, которая раньше унрется в поверхность заготовки, остановит вращение одного из центральных зубчатых колес 18.
Тяга 14 будет продолжать перемещение рейки 13, и сателлит 17, перекатываясь по остановленному одному из центральных зубчатых колес 18, будет вращать второе
центральное зубчатое колесо 18 до тех пор, пока вторая пара губок 20, 22 не упрется в поверхность меньшей ступени заготовки. Для освобождения заготовки все движения в захватном устройстве происходят в обратном направлении до полного раскрытия губок.
Пример выполнения двухпозиционного захватного устройства манипулятора.
Двухнозиционное захватное устройство (фиг. 5 и 6) состоит из одпопозицион5 ных (фиг. 1) захватных устройств г и d, соединенных стыковочным узлом, состоящим из корнуса 23, в котором на осях 24 он имеет возможность поворота зубчатым сектором 25, контактирующим с коническим зубчатым колесом 26, закрепленным на по0 воротном шпинделе 27. Пружины 28 установлены в каждом захватном устройстве на хвостовике 29 (рейки 13), контактирующем с толкателем 30, имеющим нружину 31. Толкатель 30 контактирует с тягой 14 руки манипулятора.
Двухпозициопное захватное устройство манипулятора работает следующим образом.
Под действием тяги 1,4 и толкателя 30 сжимаются пружины 31 и 28. Хвостовик 29
Q с рейкой 13 перемеилается вниз, губки захватного устройства раскрываются, захватывают заготовки, тяга 14 перемепиается вверх пружина 31 поднимает вверх толкатель 30, чтобы он не препятствовал повороту корпуса 23, а пружины 28, разжимаясь, под5 нимают вверх хвостовик 29. Губки захватного устройства закрываются и зажимают заготовку. Шпиндель 27 поворачивается, зубчатое колесо 26 поворачивает сектор 25, вместе с которым поворачивается захватное устройство с заготовкой в горизон0 тальное положение г. Второе захватное устройство занимает вертикальное положение д, и рабочий цикл привода повторяется. Двухпозиционное захватное устройство манипулятора для валов позволяет сократить цикл установки-снятия заготовки и обра ботанпых деталей.
Формула изобретения
Захватное устройство манипулятора, содержащее шарнирно установленные па корпусе захватные рычаги, кинематически вязанные с приводом их перемещения, включающим рейку, связанную с входным звеном дифференциального механизма посредством промежуточного зубчатого колеса, отличающееся тем, что, с целью упрощения конструкции и уменьшения ее габаритов, входное звено дифференциального
механизма выполнено в виде водила с зубчатым сектором внутреннего зацепления и осью, на которой свободно установлен сателлит с возможностью взаимодействия с центральными колесами, кинематически связанными с захватными рычагами.
ВидЛ
Фиг.1
7
фиг. 2
В- 8
ФигЛ
срие.5
фиг. 6
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Захватное устройство | 1986 |
|
SU1579773A1 |
| Захватное устройство | 1984 |
|
SU1199614A1 |
| Манипулирующее устройство | 1981 |
|
SU967799A2 |
| Адаптивное захватное устройство | 1986 |
|
SU1399114A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
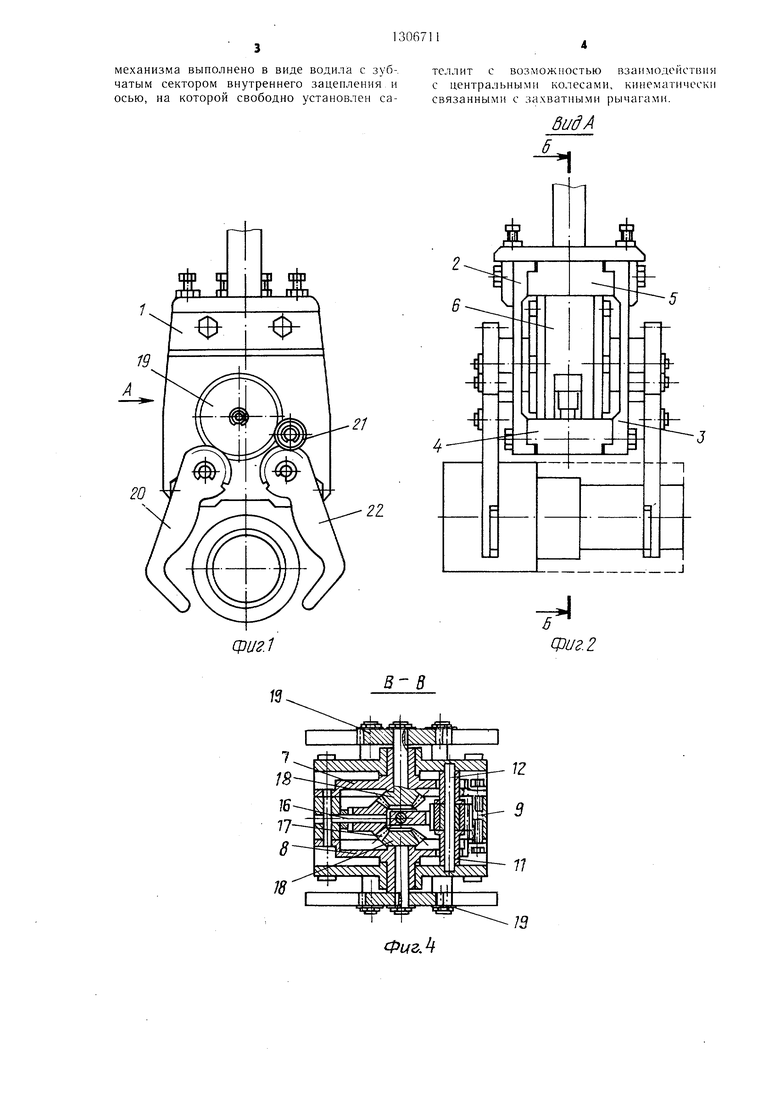
Изобретение относится к машиностроению, в частности к робототе.хнике. Цель изобретения - упрощение конструкции и ff-jsуменьшение габаритов устройства. Это достигается тем, что захватное устройство содержит установленный в корпусе дифференциальный механизм, водило 9 которого снабжено зубчатым сектором а внутреннего зацепления, связанным с приводной рейкой 13 через промежуточное колесо 10. Водило 9, получая перемещение, передает его через сателлит 17, установленный на водиле 9, центральным колесам 18, которые в свою очередь посредством промежуточных зубчатых колес передают движение на захватные рычаги 20 и 22. 6 ил. и (Л со о О5 Фиг.З
| Захват манипулятора | 1979 |
|
SU891430A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
