Изобретение отмоется к стендовом) оборудованию и может быть использовано при динамических испытаниях автомобилей с учетом реальных эксплуатационных условий
Цель изобретения - расширение функциональных возможностей путем обеспечения более широкого диапазона имитации реальных дорожных условий
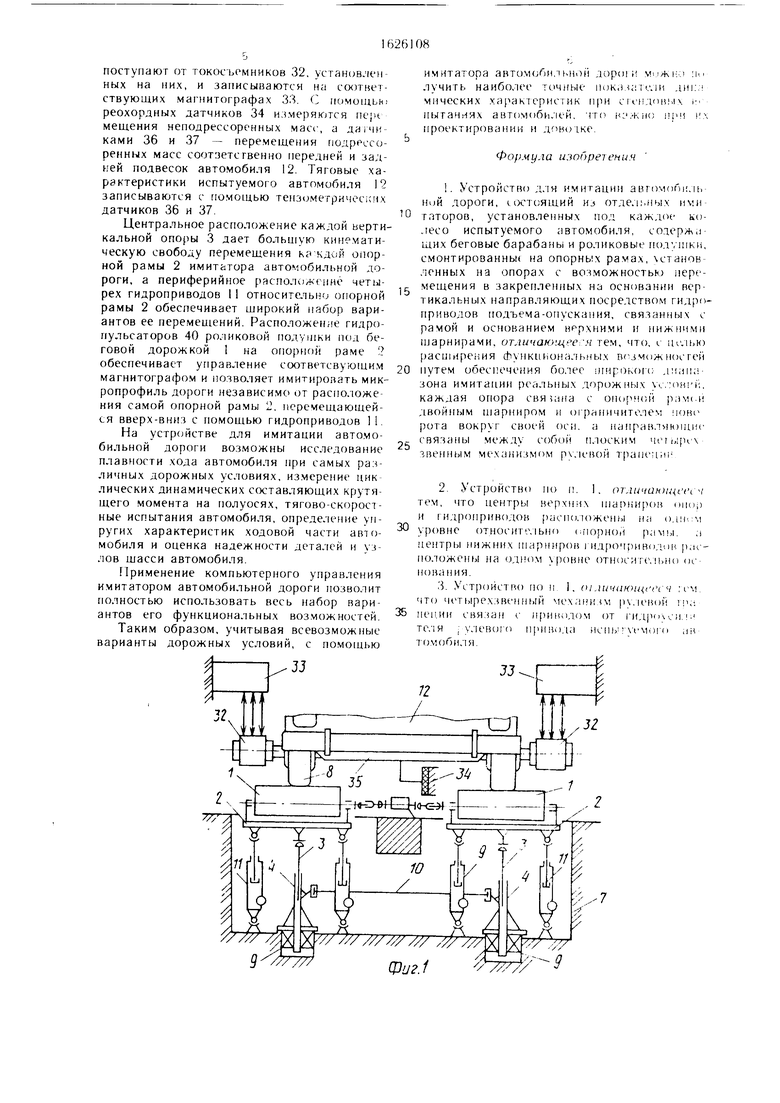
На фиг 1 показано кинематическая схема устройства для имитации автомобильной дороги, вид спереди; на фиг. 2 - то же, вид сбоку, на фиг 3 - схема гидро- силитс.1Я рулевого привода.
Ус iроист во для имитации автомобильной дороги состоит из отдельных имитаторов для каждого колеса автомобиля, которые содержа, беювые дорожки 1, расположенные на опорных рамах 2. которые, в свою очередь, vi ганов ечы посредством двойных шарниров на опорах } щающихся в вертикаль- ы . направляющих 4 и 5 с ограничением оащенич вокруг своих осей Вертикальные иа ыанляющие опор 3 неуправляемых ко- iii Ь жестко установлены на основании 7, л in ргиналытые направляющие 5 опор 3 ия мфанляемых колес 8 установлены в вертикальных вращающихся опорах 9 и свя- ачы %1ежд собой посредством плоского че- i UK HHOI о механизма рулевой трапеции К) В мене с тем каждая из опорных ,ам 2 notpt дет вом сферических шарниров изязана с четырьмя гидроприводами 11, расположенными сим метрично от носительно i ентральной опоры 3 рамы 2 Гидропри- 1о 1ы И )нипно соединены (. основа- 7 Ьетован юрожка i выполнена с 1 i 11 , ими i i ши во цчн i вия i. IO/K
i I1 Ч I1 I IH ПЫ i U 1ЫИ
ч Ы|н ч шенныи 1II кшк ма i i ки i ви зам . г ид 13 который iii, ipniipno закреп- tiiini 7 к мое. ре и т вом масло ( 1 г на время испытаний соединяется с маслопроводами 16 и 17 гидроцилиндра 18 рулевого привода испытуемо- то автомобиля 12, соединенного со штатным гидрораспределителем 1е), к котором) по маслопровод) 20 подводится масло от насоса 21 приводимого от двигателя испытуемою автомобиля 12 На насосе 21 с- тановлен бачок 22 для масла, пост)паю тцего от гидрораспределителя 19 по маслопровод) 23 В 24 гидроряспредели- геля 14 размещен золотник 25. связанный платой 26 с р тевым механизмом 27 1кпыт емого автомобиля 12, а корпус 24 i идрораспредедите.тя 19 штангой 28 связан с ры .аюм 29 поворотной цапфы управляемого чолеса 8 К торцам золотника 25, по ьб«.им ею сторонам, установлены предварительно центрир)тощие пружины 3d и il На каждом колесе Ь и 8 испытуемою антомобиля 12 устанавливаются то- косъемники 32, которые связны с соотвег- сгвчющим мат ни тог рафом 33 Реохордные
111 , И I ИН IpOM
лен на о, ноь проводов 14
5
Ь
датчики 34 чстановлены на корпусах мостов 35, а датчики 36 и 37 - на передней и задней поперечинах рамы испытуемо; о автомобиля 12, аналогично датчикам 36 и 37 установлены динамометры 38 и 39 Под бетвые дорожки 1 установлены роликовые подушки При этом центры верхних шарниров вертикальных опор 3 и верхних шарниров гидроприводов 11 расположены на одном уровне относительно опорной рамы
2, центры нижних шарниров гидроприводов 1 1 расположены на одном уровне относительно основания 7, а гидропульсаторы 40 для роликовых подушек устаноалены на опорных рамах 2.
Устройство для имитации автомобильной дороги работает следующим образом.
Испыт)емыи автомобиль 12 опирается соответственно неуправляемыми 6 и управляемыми 8 колесами на установленные на опорных рамах 2 беювые дорожки 1, ко0 торые получают возмущения гидропульсаго- ров 40 роликовых подушек, имитирующих неровности микропрофиля дороти Опорные рамы 2 получают раничное пространственное положение посредством i идроприводов 1 1, управляемых комплексно от одного пульта (не показан) Если принять за основные три пространственных положения верхнего шарнира каждою тидропривода 11 (самое верхнее, самое нижнее и середину между ними), то при наличии шестнадцати таких iидроприводов 11 получаются сорок восемь возможных ткмиций в пространстве, из которых одновременно реализуются шестнадцать, определяющих мгновенную пространственную ориентацию испытуемого автомобиля 12 Сочетание указанных основных ва- г рианюв бсм использования плоского чет ырех- J звенното механизма рулевой трапеции 10 следующее
,2(54) Ю 2 вариантов При работе плоского четырехзвенного ме- 0 ханизма рулевой трапеции 10, приводимого и действие гидроцилиндром 13 от гидроусилителя рулевою привода испытуемого автомобиля 12, одновременно с гидроцилиндром 14 производится синхронное управление поворотом соответственно беговых дорожек 1 и управляемых колес 8 При этом, принимая во внимание три основные позиции (левую, прямую и правую) поворота беговых дорожек 1 и управляемых колес 8, диаиа-юн возможных основных вариантов мчювенной пространственной ориентации испытуемого автомобиля 12 возрастает в три ра за
,7(63) 10- вариантов Роликовые подушки 40 управляются сигналами ввода от магнитографа (не пока- зан), на котором заранее записан реальный дорожный профиль для всех колес 6 и 8
Сигналы динамической составляющей крутящею момента на каждом колесе 6 или 8
0
5
0
поступают от токосъемников 32, установленных на них, и записываются на соответствующих магнитографах 33. С помощью реохордных датчиков 34 измеряются пе;н мещения неподрессоренных масс, а датчи- ками 36 и 37 - перемещения подрессоренных масс соотзетсгвенно передней и задней подвесок автомобиля 12. Тяговые характеристики испытуемого автомобиля 12 записываются с помощью тензомегрическнх датчиков 36 и 37.
Центральное расположение каждой вертикальной опоры 3 дает большую кинематическую свободу перемещения кг кдой опорной рамы 2 имитатора автомобильной дороги, а периферийное расположение четырех гидроприводов 11 относительно опорной рамы 2 обеспечивает широкий набор вариантов ее перемещений. Расположение гидропульсаторов 40 роликовой подушки под беговой дорожкой 1 на опорной раме обеспечивает управление соответсвующим магнитографом и позволяет имитировать микропрофиль дороги независимо от расположения самой опорной рамы 2. перемещающейся вверх-вниз с помощью гидроприводов 11.
На устройстве для имитации автомобильной дороги возможны исследование плавности хода автомобиля при самых различных дорожных условиях, измерение цик лических динамических составляющих крутящего момента на полуосях, тягово-скорост- ные испытания автомобиля, определение упругих характеристик ходовой части автомобиля и оценка надежности деталей и узлов шасси автомобиля.
Применение компьютерного управления имитатором автомобильной дороги позволит полностью использовать весь набор вариантов его функциональных возможностей.
Таким образом, учитывая всевозможные варианты дорожных условий, с помощью
2,
i
//J}//R ц/лттт
имитатора автомобильной дорот и V. /HK :i лучигь наиболее точные пок.матели дш: мпческих характеристик при стендовых нытаниях автомобилей, что к: ж но при проектировании и дово 1ке
Формула изобретения
I. Устройство для имитации автомобиль ной дороги, i опоя щи и из отдел;,ных ими
гаторов, установленных под каждое колесо испытуемого автомобиля, содержащих беговые барабаны и роликовые подушки, смонтированные на опорных рамах, станов- ленных на опорах с возможностью перемещения в закрепленных на основании вертикальных направляющих посредством гидроприводов подъема-опускания, связанных с рамой и основанием нррхними и нижними шарнирами, отличающее ч тем, что, с. целью расширения Функциональных возможностей
0 путем обеспечения более широкого дн.ша зона имитации реальных дорожных .... каждая опора свя uma с опорной рамс.и двойным шарниром и ограничителем ново рота своей осн. а направляющие
связаны между собой плоским четырех звенным механизмом р левой трапеции
2 Устройство по п. 1, отличающее. тем, что центры верхних шарниров они,) и т идроприводов расположены на олн- м
0 уровне относительно опорной рамы. ,i центры нижних шарниров i идрочринодов расположены на одном ронне относительно ос нонания.
3. Устройство по и 1. (ч.1ич(1ЮЩ( 1Ч ч ; с/м что четыремвенный механшм р левой IP.-.
5 пении свяизн с п|)И1ыдом от гидрочси -1 те.чя гулевою п чтвода исит уемот о .IB i
J-iV
(О
- 1
32
Фиг.1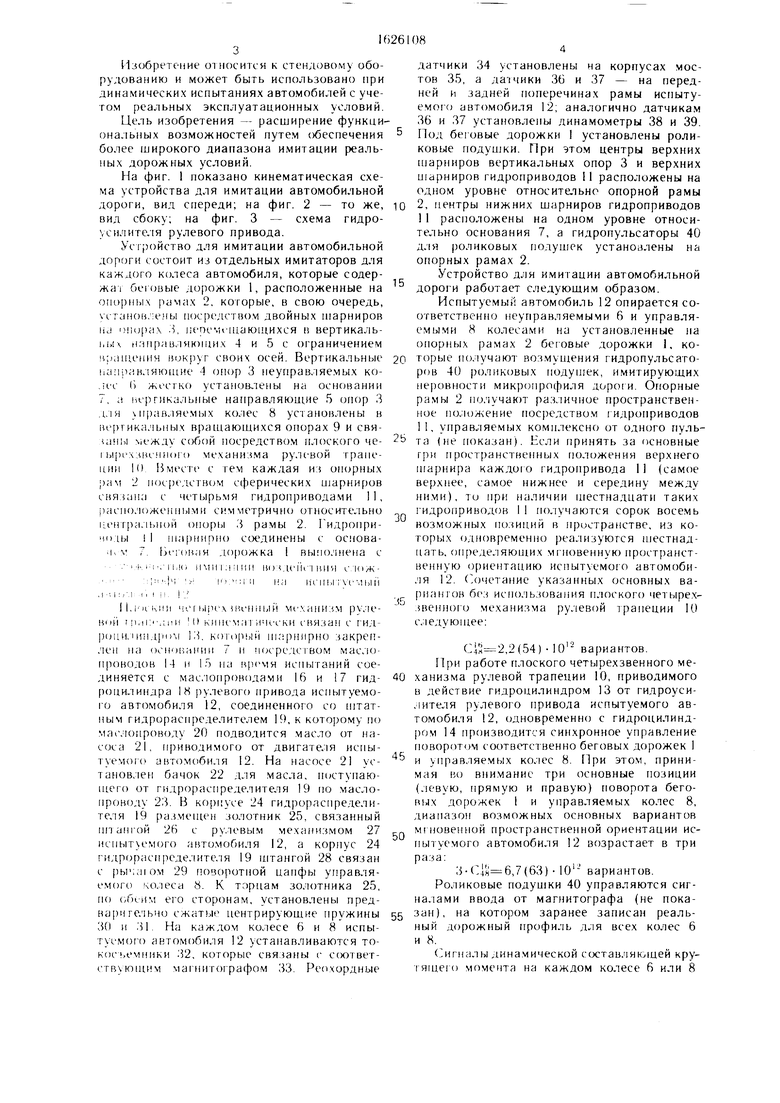
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания агрегатов транспортного средства | 1985 |
|
SU1364943A1 |
| Напольный малогабаритный стенд для исследования подвесок автомобилей | 2016 |
|
RU2629636C1 |
| Стенд для динамических испытаний колесных тракторов | 1988 |
|
SU1605151A1 |
| Автомобильный тренажер | 1973 |
|
SU546927A1 |
| РОЛИКОВЫЙ СТЕНД ДЛЯ ИСПЫТАНИЙ АВТОМОБИЛЕЙ | 1995 |
|
RU2090854C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1991 |
|
RU2030727C1 |
| КАТКОВЫЙ СТЕНД | 2011 |
|
RU2484444C1 |
| ДИНАМИЧЕСКИЙ СТЕНД-ТРЕНАЖЕР УСТОЙЧИВОГО ВОЖДЕНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2694427C1 |
| Стенд для испытания ведущих мостов | 1988 |
|
SU1553873A1 |
| Стенд для испытания транспортных средств | 1982 |
|
SU1096517A1 |
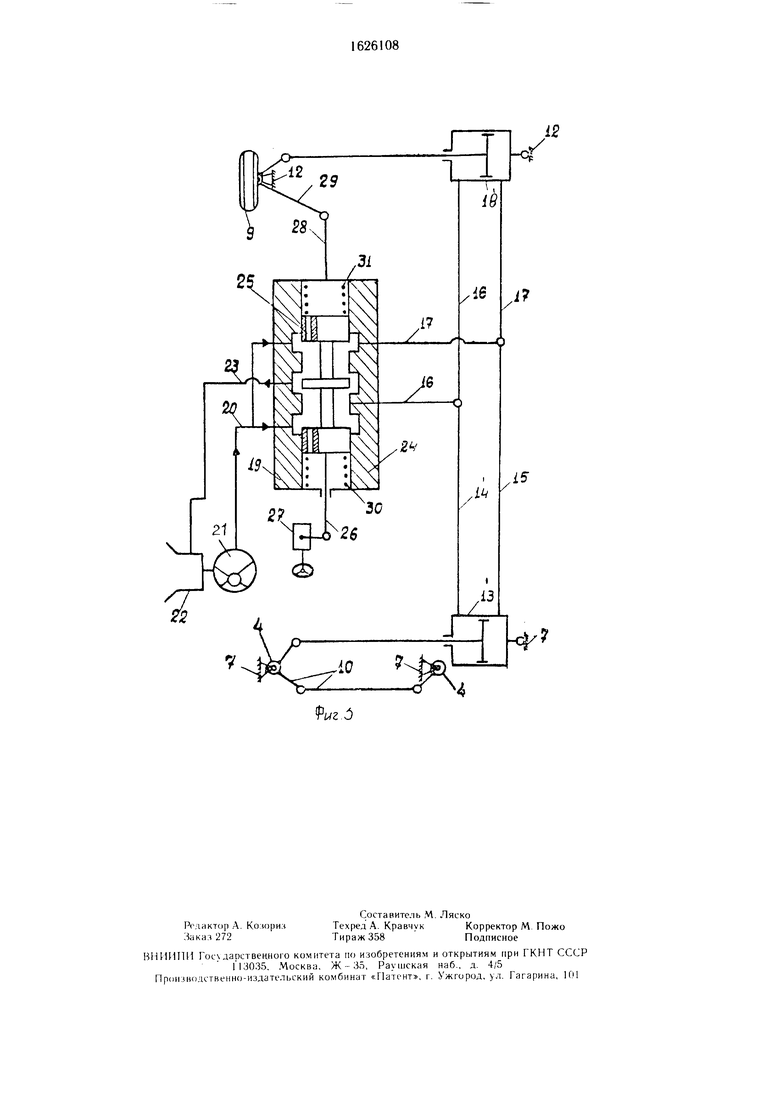
Изобретение относится к стендовому оборудованию и может быть использовано при динамических испытаниях автомобилей. Цель изобретения - расширение функциональных возможностей имитатора автомобильной дороги путем обеспечения более широкого диапазона имитаций реальных до- рож-ных условий. Устройство для имитации автомобильной дороги для каждой опорной рамы 2 состоит из отдельных имитаторов, содержащих одну центральную опору 3, перемещающуюся в вертикальных направляющих 4 с ограничением вращения вокруг своей оси и связанную с опорной рамои посредством двойного шарнира. Вертикальные направляющие опор имитаторов для управляемых колес 8 испытуемого автомобиля 12 установлены в вертикальных вращающихся опорах 9 и связаны между собой посредством плоского четыре.хзвенника рулевой трапеции 10 с возможностью кинематической связи с механизмом рулевого управления испытуемого автомобиля 12, а вертикальные направляющие опор имитаторов для направляемых колес 6 жестко закреп лены на основании. По четыре гидроири вода 11 подъема-опускания расположены по периферии каждой опорной рамы 2 симметрично относительно центральной вертикальной опоры 3. Гидроприводы 11 связаны с опорной рамой 2 и основанием 7 посредством сферических шарниров. Центры верхних шарниров центральных вертикальных опор и гидроприводов расположены на одном уровне относительно опорной ра мы, а центры нижних шарниров гидропри водов расположены на одном уровне относительно основания, гидропульсаторы 40 для роликовых подушек беговых дорожек установлены на опорных рамах 2 2 з п ф-лы, 3 ил. tЈ (Л о оэ 00 WV4V4J j
| Патент США № 3520180 кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
