Изобретение относится к машиностроению, в частности к агрегатам перемотки и обработки полосы в рулонах.
Цель изобретения - повышение производительности агрегата перемотки за счет полного использования двигателей моталки и разматывателя по мощности и частоте вращения.
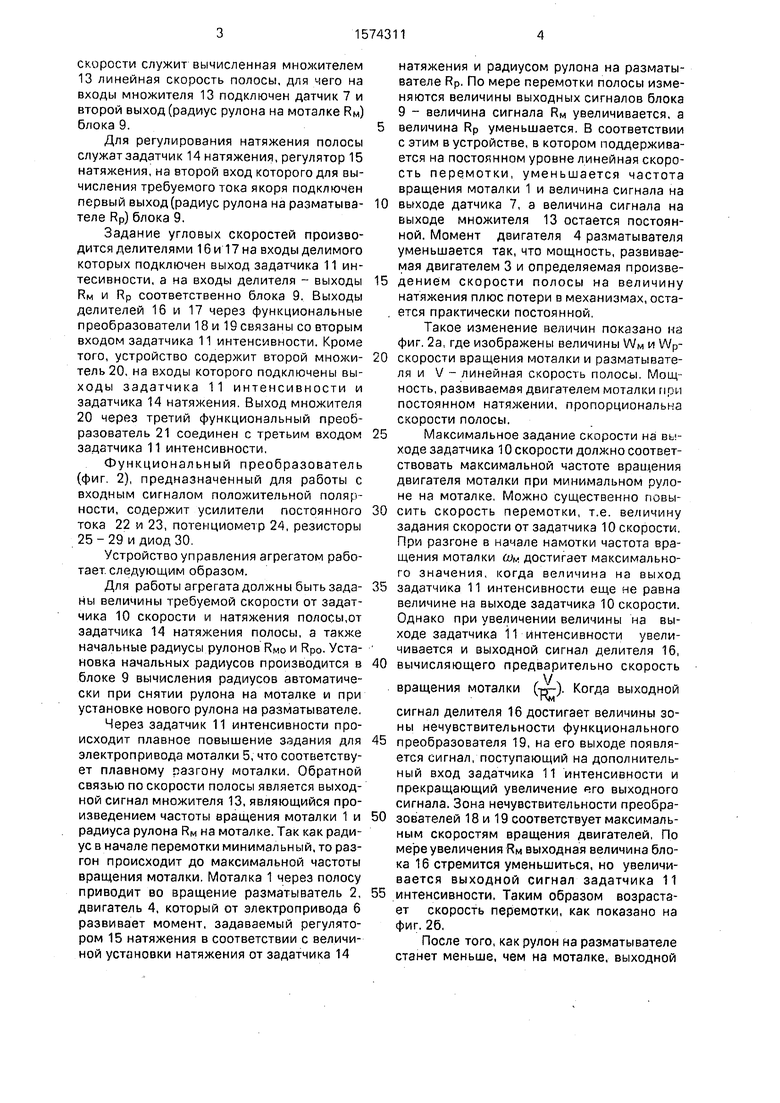
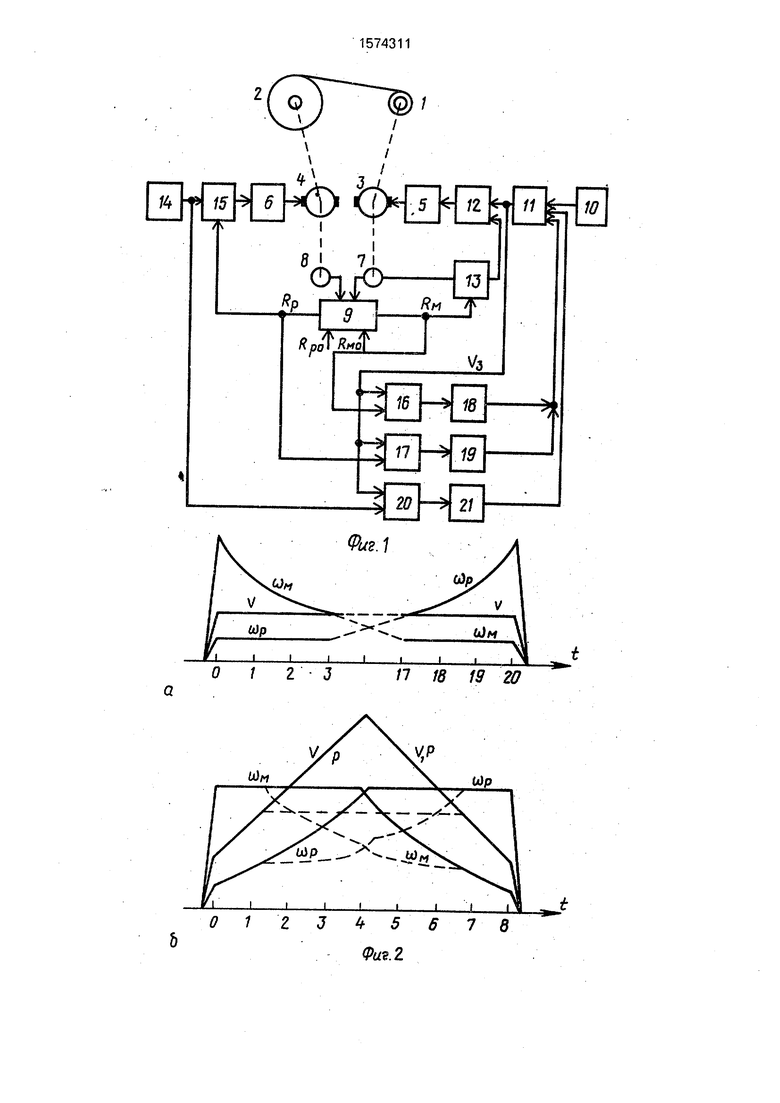
На фиг. 1 изображена функциональная схема устройства управления агрегатом перемотки; на фиг. 2 - графики изменения скорости полосы и механизмов-.на фиг. 3 - структурная схема функционального преобразователя.
Устройство включает моталку 1 и разма- тыватель 2, электродвигатели моталки 3 и разматывателя 4, источники питания с регуляторами тока якоря и тока возбуждения двигателя моталки 5 и двигателя разматывателя 6, датчики частоты вращения моталки 7 и разматывателя 8, блок 9 вычисления радиусов рулона на моталке и разматывателе 11.
Для регулирования скорости агрегата служат задатчик 10 скорости, задатчик 11 интенсивности и регулятор 12 скорости, включенные последовательно и подключенные к входу регулятора 5 моталки. В качестве обратной связи для регулятора 12
ел
2
GJ
скорости служит вычисленная множителем 13 линейная скорость полосы, для чего на входы множителя 13 подключен датчик 7 и второй выход (радиус рулона на моталке RM) блока 9.
Для регулирования натяжения полосы служатзадатчик 14 натяжения, регулятор 15 натяжения, на второй вход которого для вычисления требуемого тока якоря подключен первый выход (радиус рулона на разматыва- теле Rp) блока 9.
Задание угловых скоростей производится делителями 16 и 17 на входы делимого которых подключен выход задатчика 11 ин- тесивности, а на входы делителя - выходы RM и Rp соответственно блока 9. Выходы делителей 16 и 17 через функциональные преобразователи 18 и 19 связаны со вторым входом задатчика 11 интенсивности. Кроме того, устройство содержит второй множитель 20, на входы которого подключены выходы задагчика 11 интенсивности и задатчика 14 натяжения. Выход множителя 20 через третий функциональный преобразователь 21 соединен с третьим входом задатчика 11 интенсивности.
Функциональный преобразователь (фиг. 2), предназначенный для работы с входным сигналом положительной полярности, содержит усилители постоянного тока 22 и 23, потенциометр 24, резисторы 25-29 и диод 30.
Устройство управления агрегатом работает следующим образом.
Для работы агрегата должны быть заданы величины требуемой скорости от задатчика 10 скорости и натяжения полосы,от задатчика 14 натяжения полосы, а также начальные радиусы рулонов RMO и Rpo. Установка начальных радиусов производится в блоке 9 вычисления радиусов автоматически при снятии рулона на моталке и при установке нового рулона на разматывателе. Через задатчик 11 интенсивности происходит плавное повышение задания для электропривода моталки 5, что соответствует плавному пазгону моталки. Обратной связью по скорости полосы является выходной сигнал множителя 13, являющийся произведением частоты вращения моталки 1 и радиуса рулона RM на моталке. Так как радиус в начале перемотки минимальный, то разгон происходит до максимальной частоты вращения моталки. Моталка 1 через полосу приводит во вращение разматыватель 2, двигатель 4, который от электропривода 6 развивает момент, задаваемый регулятором 15 натяжения в соответствии с величиной установки натяжения от задатчика 14
натяжения и радиусом рулона на разматывателе Rp. По мере перемотки полосы изменяются величины выходных сигналов блока 9 - величина сигнала RM увеличивается, а
величина Rp уменьшается. В соответствии с этим в устройстве, в котором поддерживается на постоянном уровне линейная скорость перемотки, уменьшается частота вращения моталки 1 и величина сигнала на
выходе датчика 7, а величина сигнала на выходе множителя 13 остается постоянной. Момент двигателя 4 разматывателя уменьшается так, что мощность, развиваемая двигателем 3 и определяемая произведением скорости полосы на величину натяжения плюс потери в механизмах, остается практически постоянной.
Такое изменение величин показано на фиг. 2а, где изображены величины WM и Wpскорости вращения моталки и разматывателя и V - линейная скорость полосы. Мощность, развиваемая двигателем моталки при постоянном натяжении, пропорциональна скорости полосы.
Максимальное задание скорости на виходе задатчика 10 скорости должно соответствовать максимальной частоте вращения двигателя моталки при минимальном рулоне на моталке, Можно существенно повысить скорость перемотки, т.е. величину задания скорости от задатчикэ 10 скорости, При разгоне в начале намотки частота вращения моталки ov достигает максимального значения, когда величина на выход
задатчика 11 интенсивности еще че равна величине на выходе задатчика 10 скорости. Однако при увеличении величины на выходе задатчика 11 интенсивности увеличивается и выходной сигнал делителя 16,
вычисляющего предварительно скорость
вращения моталки (ту-)- Когда выходной
сигнал делителя 16 достигает величины зоны нечувствительности функционального
преобразователя 19, на его выходе появляется сигнал, поступающий на дополнительный вход задатчика 11 интенсивности и прекращающий увеличение его выходного сигнала. Зона нечувствительности преобразователей 18 и 19 соответствует максимальным скоростям вращения двигателей, По мере увеличения RM выходная величина блока 16 стремится уменьшиться, но увеличивается выходной сигнал задатчика 11
интенсивности, Таким образом возрастает скорость перемотки, как показано на фиг. 26.
После того, как рулон на разматывателе станет меньше, чем на моталке, выходной
сигнал делителя 17 по величине станет больше, чем сигнал на выходе блока 16, и будет определять скорость перемотки, а скорость моталки будет уменьшаться.
Такое функционирование системы управления, как описано выше и показано на фиг. 26 сплошными линиями, будет в том случае, если даже при максимальной скорости мощность не достигнет номинальной величины. Мощность вычисляется множителем 20 по формуле
P F -V
При достижении номинальной мощности, которой соответствует величина зоны нечувствительности преобразователя 21, на его выходе появляется сигнал, поступающий на дополнительный вход задатчика 11 интенсивности и прекращающий увеличение его выходного сигнала, В этом случае изменения скоростей при перемотке соответствуют пунктирным линиям на фиг. 26.
Аналогичный график получается, если величина задания скорости от задатчика 10 скорости установлена ниже максимально возможной скорости перемотки.
Функциональный преобразователь (фиг. 3) работает следующим образом.
Величина зоны нечувствительности оп- ределяется величиной напряжения заданного потенциометром 24 и соотношением величины резисторов 25 и 26, При входном сигнале, меньшем по величине зоны нечувствительности, на выходе усилителя 22 будет сигнал, по величине близкий к нулю, так как усилитель 22 при наличии на его выходе даже небольшого сигнала положительной полярности шунтируется открытым диодом 30. При увеличении входного сигнала до величины, превышающей зону нечувствительности на выходе усилителя 28, изменяется полярность сигнала на отрицательную, диод 30 закрывается и величина выходного сигнала прямо пропорциональна величине входного сигнала и соотношению величин резисторов 25 и 27. На усилителе 23 и резисторах 28 и 29 собрана схема инвертора.
Таким образом, устройство позволяет существенно увеличить скорость перемотки, ограниченной только максимально допустимой частотой вращения моталки или размэтывателл и мощностью развиваемой двигателем моталки,
Формула изобретения Устройство для управления агрегатом
перемотки полосы, содержащее последовательно соединенные задатчик натяжения, регулятор натяжения и электропривод разматывателя, последовательно соединенные задатчик скорости, задатчик интенсивьости, регулятор скорости и электропривод моталки, датчики частоты вращения размзтывателя и моталки, подключенные к входам блока вычисления радиусов рулона на моталке и разматывателе,
первый выход которого подключен к второму входу регулятора натяжения, второй выход - к первому входу множителя, второй вход которого связан с датчиком частоты вращения моталки, а выход - с вторым входом регулятора скорости, отличзющее- с я тем, что, с целью повыщения производительности агрегата за счет полного использования двигателей моталки и разматывателя по мощности и частоте вращения, в него дополнительно введены два блока деления, второй множитель и три функциональных преобразователя, при этом первые входы блоков деления и второго множителя подключены к выходу задатчика интенсивности, вторые выходы первого и второго блоков деления связаны соответственно с первым и вторым выходами блока вычисления радиусов рулона на моталке и разматывателе, а выход первого
блока деления через первый функциональный преобразователь и выход второго блока деления через второй функциональный преобразователь соединены с вторым входом задатчика интенсивности, выход задатчика натяжения подключен к второму входу второго множителя, выход которого через третий функциональный преобразователь соединен с третьим входом задатчика интенсивности.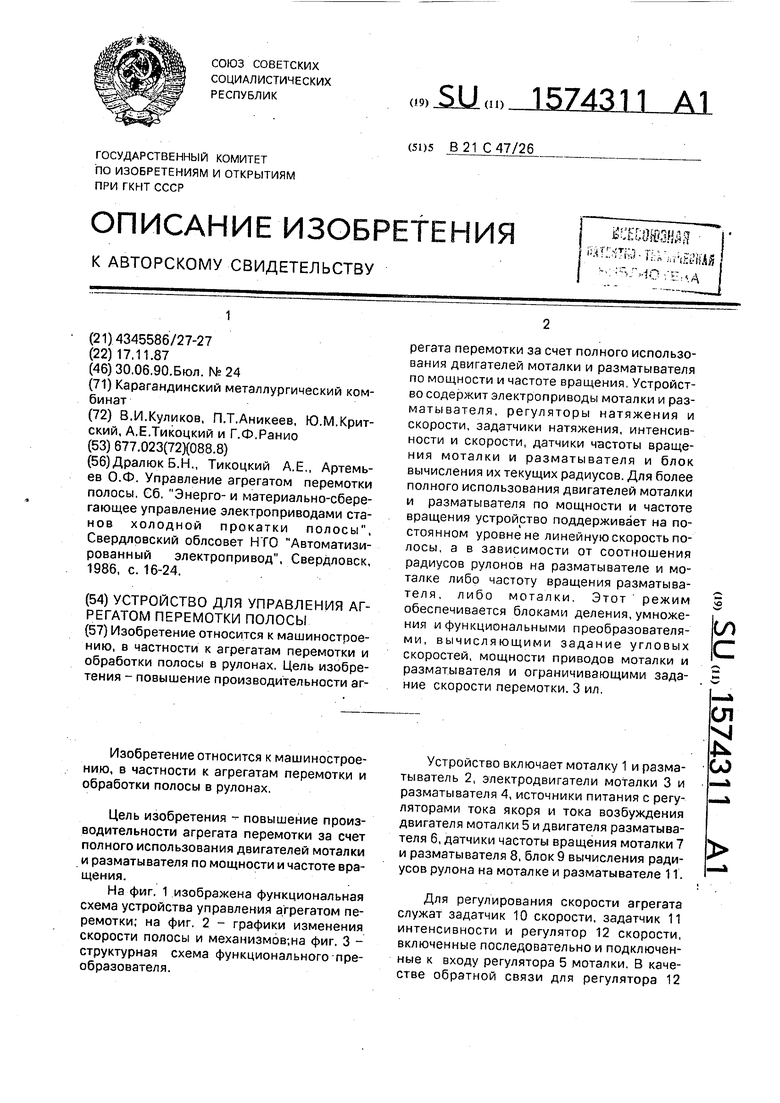

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод агрегата перемотки полосы | 1984 |
|
SU1227283A1 |
| Устройство для управления агрегатом перемотки рулонов | 1977 |
|
SU733751A1 |
| Способ управления электроприводами агрегата перемотки рулонного проката | 1978 |
|
SU776696A1 |
| Устройство для регулирования натяжения | 1984 |
|
SU1301756A1 |
| Устройство для управления агрегатом перемотки рулонов | 1989 |
|
SU1622049A2 |
| Устройство для регулирования натяжения полосы на моталке листопрокатного стана | 1982 |
|
SU1041188A1 |
| Устройство для управления электроприводом моталки листопрокатного стана | 1984 |
|
SU1253689A1 |
| Устройство для регулирования толщины полосы на одноклетьевом стане холодной прокатки | 1989 |
|
SU1639818A1 |
| Линия продольной резки | 1988 |
|
SU1613215A1 |
| Устройство для регулирования натяжения полосового материал | 1976 |
|
SU568471A1 |
Изобретение относится к машиностроению, в частности к агрегатам перемотки и обработки полосы в рулонах. Цель изобретения - повышение производительности агрегата перемотки за счет полного использования двигателей моталки и разматывателя по мощности и частоте вращения. Устройство содержит электроприводы моталки и разматывателя, регуляторы натяжения и скорости, задатчики натяжения, интенсивности и скорости, датчики частоты вращения моталки и разматывателя и блок вычисления их текущих радиусов. Для более полного использования двигателей моталки и разматывателя по мощности и частоте вращения устройство поддерживает на постоянном уровне не линейную скорость полосы, а в зависимости от соотношения радиусов рулонов на разматывателе и моталке либо частоту вращения разматывателя, либо моталки. Этот режим обеспечивается блоками деления, умножения и функциональными преобразователями, вычисляющими задание угловых скоростей, мощности приводов моталки и разматывателя и ограничивающими задание скорости перемотки. 3 ил.
О 1 2-3
ь
01 Z J 4 5 6 7 8
Фаз.2.
П 18 19 20
| Дралюк Б.Н., Тикоцкий А.Е., Артемьев О.Ф | |||
| Управление агрегатом перемотки полосы | |||
| Сб | |||
| Энерго- и материально-сберегающее управление электроприводами станов холодной прокатки полосы, Свердловский облсовет НТО Автоматизированный электропривод, Свердловск, 1986, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
