16
Ib 13 Put.1
л
Изобретение относится к. машиностроению и может быть использовано в металлорежущих станках.
Цель изобретения - повышение быст родействия при переменной массе подвижного органа путем уменьшения приведенного момента инерции.
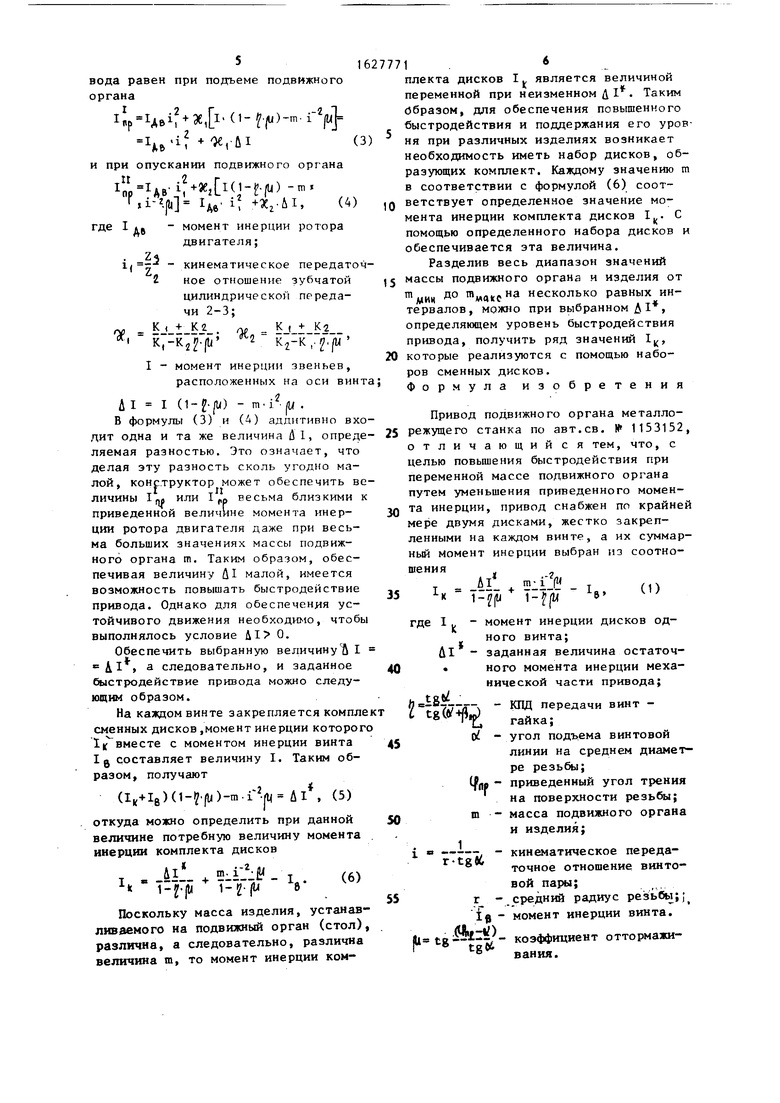
На фиг. 1 изображена кинематическая схема привода; на фиг. 2 - схема действующих на винт сил при подъеме груза; на фиг, 3 - то же, при опускании груза.
Привод подвижного органа металлорежущего станка содержит электродви- гатель 1, который через цилиндрические зубчатые колеса 2 и 3 соединен с валом 4. Последний через пары конических зубчатых колес 5 и 6, 7 и 8 кинематически соединен соответствен- но с самотормозящимися винтовыми парами скольжения - винтом 9 с гайкой- 10 и винтом 11 с гайкой 12.
Гайки 10 и 12 жестко закреплены в подвижном органе. 13, перемещаемом по направляющим стойки 14. На валу 4 установлена муфта 15, осуществляющая предварительный натяг кинематической цепи. Винты 9 и 11 и соответственно гайки 10 и 12 имеют резьбу скольжения с одинаковыми геометрическими параметрами. На каждом винте 9 и 11 закреплены соответственно наборы дисков 16 и 17.
Привод подвижного органа металлорежущего станка работает следующим образом.
Первоначально производятся выбор зазоров и предварительный натяг в звеньях кинематической цепи привода. Это осуществляется путем разворота двух половин муфты 15 в противоположные стороны. При этом винты 9 и 1 также разворачиваются в противоположные стороны, благодаря чему обеспе- чивается силовой контакт между винтовыми поверхностями винтов и гаек.
При перемещении подвижного органа 13 по стойке 14 вращение винтов 9 и 11 происходит в одну сторону. При этом одна из передач работает в тяговом режиме, а другая - в режиме оттор маживания. При перемене направления вращения режимы работы передач меняются.
Особенность работы привода состои в следующем.
Известно, что если привод, включающий двигатель, самотормозящуюся
,
Q
з 0
5 0
Q
0 5
5
передачу, например, червячную (или какую-либо другую) и подвижный орган, находится в режиме разбега или торможения и если при этом самотормозящаяся передача находится в режиме от- тормаживания (например, при опуска- .нии груза), то момент инерции системы, приведенный, например, к валу червяка, равен разности момента инерции масс, расположенных на оси червяка, и момента инерции масс, расположенных на оси червячного колеса, приведенного в соответствии с известными правилами к оси червяка. Это обстоятельство позволяет в режиме отторма- живания самотормозящейся передачи получить малую величину приведенного момента инерции привода, т.е. малую величину суммарной его инерционности. Это.в свою очередь, обеспечивает большие ускорения при разбеге или торможении привода при малых моментах двигателя. Однако эта особенность самотормозящейся передачи проявляется лишь только в тех случаях, когда она работает в режиме оттормаживания. При работе передачи в других режимах - тяговом (например, режим подъема груза) или инверсном тяговом (например, режим опускания груза при отсутствии самоторможения) это свойство не наблюдается.
Если же с помощью двух самотормозящихся передач любого типа образовать замкнутый кинематический контур и обеспечить в нем предварительный натяг, например так, как это сделано в известном приводе подвижного органа, то при движении привода в любом из направлений всегда одна из самотормозящихся передач находится в тяговом режиме, а другая в режиме оттормаживания. При изменении направления вращения привода измеряются режимы работы передач. Реверсируемость движения замкнутого самотормозящегося с предварительным натягом привода обеспечивается при условии
-ju
к
Јк
Кл
Г
;
(2)
и Кл - крутильные жесткости
каждой из ветвей кинематической цепи механизма.
установке комплектов дисков 6 винтах 9 и-11 условный привек валу 4 момент инерции привода равен при подъеме подвижного органа
lIp lAeif+9e,l-(1-f(U)-m Ггр
. 2
i,6-i; +,&
Чь
и при опускании подвижного органа .2
V i +Хг Л1,
(
I дв - момент инерции ротора
двигателя; Z3
,,-zjкинематическое передаточное отношение зубчатой j$ цилиндрической поредачи 2-3;
«v - Ј i-K . Of К- -1 В. « K,-K2J.fU 2
К2-К, p.fM
I - момент инерции звеньев,
расположенных на оси винта .2
Д I I (1-Ј-|И) - т-Г JU .
В формулы (3) и (4) аддитивно входит одна и та же величина Й1, опреде- ляемая разностью. Это означает, что делая эту разность сколь угодно малой, конструктор может обеспечить величины I м или IРр ресьма близкими к приведенной величине момента инер- ции ротора двигателя даже при весьма больших значениях массы подвижного органа т. Таким образом, обеспечивая величину Д1 малой, имеется возможность повышать быстродействие привода. Однако для обеспеченяя устойчивого движения необходимо, чтобы выполнялось условие il 0.
Обеспечить выбранную величину I - Д1 , а следовательно, и заданное быстродействие привода можно следующим образом.
На каждом винте закрепляется комплек сменных дисков .момент инерции которого Iк вместе с моментом инерции винта Ig составляет величину I. Таким образом, получают
(IK+I8)(1-0-fU)-m Г2-А|- AI, (5)
откуда можно определить при данной величине потребную величину момента инерции комплекта дисков
41 , т. Т
V
(6)
Поскольку масса изделия, устанавливаемого на подвижный орган (стол), различна, а следовательно, различна величина т, то момент инерции ком)
10
j$
а;
20
35
- 25 30
плекта дисков 1 является величиной переменной при неизменном ДI. Таким Образом, для обеспечения повышенного быстродействия и поддержания его уров ня при различных изделиях возникает необходимость иметь набор дисков, образующих комплект. Каждому значению m в соответствии с формулой (6) соответствует определенное значение момента инерции комплекта дисков 1. С помощью определенного набора дисков и обеспечивается эта величина.
Разделив весь диапазон значений массы подвижного органа ч изделия от
m мин до тмакена неск°лько равных интервалов, можно при выбранном ДI, определяющем уровень быстродействия привода, получить ряд значений 1К, которые реализуются с помощью наборов сменных дисков. Формула изобретения
Привод подвижного органа металлорежущего станка по авт.св. № 1153152, отличающийся тем, что, с целью повышения быстродействия при переменной массе подвижного органа путем уменьшения приведенного момента инерции, привод снабжен по крайней мере двумя дисками, жестко закрепленными на каждом ВИНТР, а их суммарный момент инерции выбран из соотношения
Al , miijW
в1
I T-fju i-fp IR
(О
где I - момент инерции дисков одного винта;
UI - заданная величина остаточ- ного момента инерции механической части привода;
9 7§7JIflf i КПД передачи винт с tge гайка;
0 - угол подъема винтовой
линии на среднем диаметре резьбы;
- приведенный угол трения на поверхности резьбы;
m - масса подвижного органа и изделия;
i в-. - кинематическое передаГ ьй ОС
точное отношение винтовой пары;
г - средний радиус резьбы;;( tfl - момент инерции винта.
Щ tK -т, - коэффициент оттормажи- Г e tgCt
ftf
вания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для магнитострикционной импульсной подачи | 1960 |
|
SU135325A1 |
| ПОДЪЕМНЫЙ МЕХАНИЗМ ОРУЖИЯ БАШЕННОЙ УСТАНОВКИ | 2011 |
|
RU2484410C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Устройство для наращивания электродов | 1978 |
|
SU750762A1 |
| Электромеханический привод зажима Барановского В.В. | 1987 |
|
SU1511000A1 |
| Зубчатая передача | 1981 |
|
SU1083015A1 |
| Шариковая винтовая передача | 1986 |
|
SU1504439A1 |
| Отключающий механизм | 1977 |
|
SU765573A1 |
| Магнитострикционный привод импульсной подачи электрода-инструмента | 1980 |
|
SU931344A1 |
| Прецизионный блокиратор комбинированного действия для пространственного блокирования вала | 2018 |
|
RU2674956C1 |
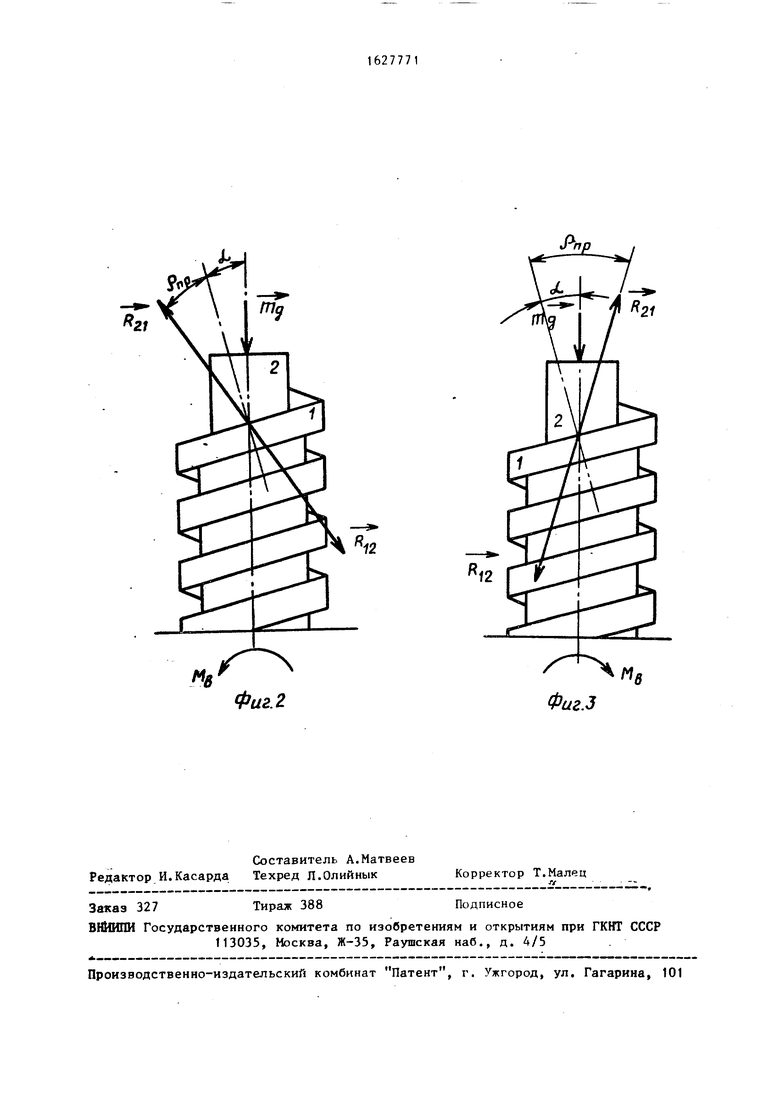
Изобретение относится к машиностроению. Цель изобретения - повышение быстродействия при переменной массе подвижного органа. Это достигается за счет уменьшения приведенного момента инерции привода. На каждом i винте 9 и 11 жестко закреплен комплект сменных дисков 16 и 17, Суммарный момент инерции каждого винта выбран из соотношения, приведенного в тексте описания изобретения. 3 ил.
Фиг. 2
Фиг.З
| Авторское свидетельство СССР 1153152, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
