Изобретение относится к аналоговой вычислительной технике и предназначено для применения при исследовании динамики механических систем, содержащих пары трения, с учетом зависимостей их сил упругофрик- ционного сопротивления от действующих в контакте пары тангенциального и нормального усилий, массы подвижного элемелта и диссипации энергии в контакте в процессе предварительного смещения этого подвижного элемента.
Цель изобретения - повышение точности моделирования и расширение функциональных возможностей за счет учета зависимости силы упругофрик- ционного сопротивления в контакте пары от изменений действующих одновременно тангенциального и нормального усилий.
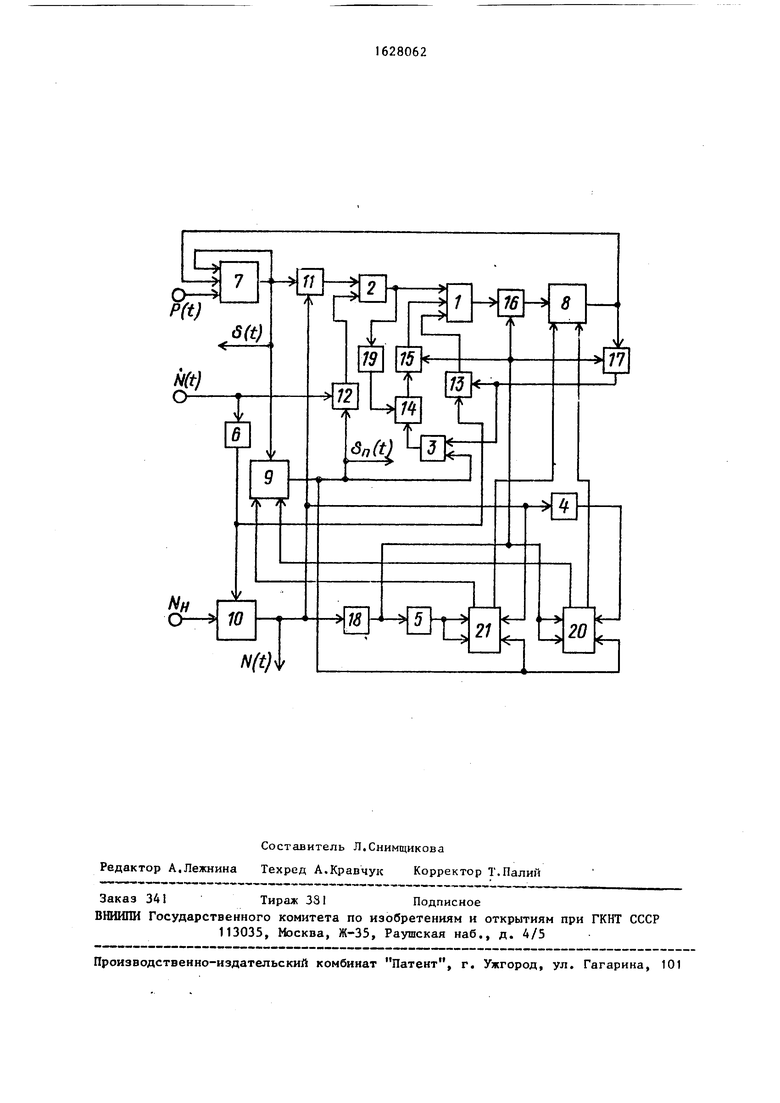
На чертеже представлена схема предлагаемого устройства.
Устройство имеет вход, задающий значение сигнала действующего тангенциального усилия P(t), вход задания значения сигнала скорости изменения действующего нормального усилия N(t), вход задания значения сигнала начального значения нормального усилия Ыц, выход по сигналу предварительного смещения подвижного элемента Јn(t), выход по сигналу скорости перемещения подвижного элемента On(t), выход по сигналу действующего нормального усилия N(t), сумматоры 1-3, инверторы 4-6, интегро- сумматор 7, интеграторы 8-10, блоки
О №
00
о
Од ND
11-Г4 умножения, блоки 15- 17 деления, блок 18 извлечения квадратного корпп, блок 19 выделения модуля, компара- торы 20 и 21.
Устройство работает следующим образом.
В процессе моделирования сигнал, соответствующий действующему на подвижный элемент пары тангенциальному усилию P(t), с входа устройства поступает на первый информационный вход ннтегросумматора 7, с выхода которого снг пал, соответствующий скорости перемещения подвижного элемента пары §,, (t), поступает на его второй информационный вход, выход устройства, вход блока 11 умножения.и вход интегратора 9. Сигнал, соответствующий предварительному смещению подвижного элемента о (t), с выхода этого интегратора подается на выход устройства, один из входов блока 12 умножения, вход сумматора 3, первые входы сравнения компараторов 20 и 21.
С входа задания значения сигнала скорости изменения действующего нормального усилия N(c) сигнал поступает непосредственно на вход блока 12 умножения, через инвертор 6 на вход блока 13 умножения и на вход интегратора 10, на вход .задания начальных условий интегрирования которого подается сигнал, соответствующий начальному значению действующего нормального усилия Кц. С выхода этого интегратора сигнал, соответствующий действующему нормальному усилию N(t), поступает па выход устройства, вход блока 11 умножения, вход блока 18 извлечения квадратного корня и первые сигнальные входы компараторов 20 и 21 соответственно через инвертор 4 и непосредственно. Сигнал, соответствующий -лДкЕ), с выхода блока 18 извлечения квадратного корня подается соответственно непосредственно и через инвертор 5 на вторые сигнальные
ходы и входы
сравнения компарато-
t.
50
В результате выходах вырабаты ветствующие пар моделируемой пар темой интегродиф нений :
fl(t) J кг((0 - KTl f(t) - KI}x(t)|dt + crj
о
Г t
T(t)
jT(t)dt + C&npH|Јn(t)Snn(t); TenCOsgr Ct) nPHJtfh(t)| -Ј,,„(0;
r JfcOdt + C9 )(t);
L(t)sgnS(t) при | &n(t) | -fnn(t);
ПЛ4
ров 20 п 21 соответствующие выходы которых подключены к входам задания ограничения интеграторов 8 и 9 что ограничивает выходные напряжения этих интеграторов соответственно величинами, пропорциональными -4N(t) и N(t). Одновременно сигнал с выхода блока J8 поступает на входы делителей блоков 15-17 деления. С выхода интегратора 8 сигнал, соответствуют щий силе упругофрикционного сопротивления в контакте пары T(t), подается на третий информационный вход интег- росумматора 7 и вход делимого блока 17 деления, с выхода которого сигнал, соответствующий частному T(t) /U|N(t) f поступает на вход сумматора 3 и вход блока 13 умножения. С выхода сумматора 3 сигнал, соответствующий 1Ц2§n.(t)- КТ(t), подается на Один из входов блока 14 умножения, а с выхода блока 13 умножения сигнал, соответствующий N(t)T(t)AJN(ty, поступает на вход сумматора ,1.
Сигнал((;)Н(1:) подается на вход сумматора 2, на другой вход которого поступает сигнал N(t)0j.(t) с выхода блока 12 умножения. С выхода cyMMa- 0 тора 2 сигнал K21&(t)N(t)-Ii22;(t)5yi(L) подается на вход сумматора 1 и вход блока 19, с выхода которого сигнал, соответствующий модулю входного сигнала, поступает на вход блока 14
0
5
умножения, а с его выхода - на вход делимого блока 15 деления и затем на вход сумматора 1, на выходе кото- рого получается сигнал T(tX|N(t), который подается на вход делимого блола 16 деления, с выхода которого сигнал, соответствующий скорости изменения силы упругофрикционного сопротивления T(t), поступает на вход интегратора 8.
В результате устройство на своих выходах вырабатывает сигналы, соответствующие параметрам состояния моделируемой , описываемого системой интегродифференциальных Уравнений :
Јnn(t) - (Т); Tex(t) fN(t);
N(t) -J N(t)dt + C,0;
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования пары трения | 1988 |
|
SU1817110A1 |
| Устройство для моделирования силы трения | 1987 |
|
SU1543427A1 |
| Устройство для моделирования механической колебательной системы | 1988 |
|
SU1817111A1 |
| Устройство для моделирования механических характеристик твердого тела | 1988 |
|
SU1755302A1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| Устройство для определения кинетических коэффициентов биохимической реакции | 1982 |
|
SU1124343A1 |
| Устройство для определения требуемого ресурса технического изделия | 1989 |
|
SU1714636A1 |
| Комплексное устройство контроля параметров | 1988 |
|
SU1520482A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ ПЕРЕДАЧИ ИНФОРМАЦИИ С АМПЛИТУДНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1991 |
|
RU2042194C1 |
| Устройство для диагностики систем трения качения | 1983 |
|
SU1231419A1 |
Изобретение относится к аналоговой вычислительной технике и пред- назначено для использования при исследовании динамики механических систем с парами трения. Цель изоб- ретения - повышение точности моделирования и расширение функциональных возможностей -/стройства. Устройство по сигналам, поступающим на его три входа и соответствующим действующему на подвижный элемент пары тангенциальному усилию, скорости изменения действующего нормального усилия и его начального значения, на своих трех выходах вырабатывает сигналы, соответствующие предварительному смещению подвижного элемента пары, скорости этого элемента ч действующему нормальному усилию в контак- Q те пары. 1 ил. /)
(° )Ш +Км Кг(с)М(0 -KttN(t)(t)
t) sgn
где P(t) T(t)
N(t) HH
o,
fc
Tc(t)
(t), N(t)
f
r
T, , Kt2,
79
(4 t К ц ,
13
gj , К 2г 31 .)
I при .f(t) 0; О при $(t) 0; -1 при S(t) 0,
-действующее на подвижный элемент пары трения тангенциальное усилие;
-тангенциальное усилие упругофрикционного сопротивления в контакте пары трения;
-действующее в контакте пары нормальное усилие;
-начальное значение нормального усилия;.
-соответственно предварительное смещение подвижного элемента пары и его предельная величина;
-усилие упругофрикционного сопротивления в контакте при относительном скольжениия элементов пары;
скорости изменения соответствующих усилий; коэффициент трения; коэффициент пропорциональности предельного предварительного смещения;
коэффициенты передачи ин- тегросумматора 7 соответственно по первому, второму и третьему входам;
коэффициенты передачи сумматора 1 по соответствующим входам;
коэффициенты передачи сумматоров 2 и 3 по соответствующим входам;
-$$ - K«H(t)(t)| ;
С7, Cg ,
с,, с
40 - начальные условия интегрирования соответственно интегросумматора 7 и интеграторов 8, 9 и 10, причем
5
И
С 40 пропорционально N t - время.
Для учета массы подвижного элемента пары трения коэффициенты передачи по входам интегросумматора 7 должны быть обратно пропорциональны величине этой массы.
Предлагаемое устройство повышает
0 точность моделирования механических систем с нарами трения и расширяет класс динамических задач, решаемых на АВМ. Это обеспечивается за счет воспроизведения зависимосей сил
5 упругофрикционного сопротивления в контакте моделируемой пары трения от изменения действующих на подвижный элемент пары тангенциальных и нормальных усилии, массы подвижного эле0 мента, его перемещения и скорости этого перемещения с учетом явлений диссипации энергии в контакте пары в процессе предварительного смещения подвижного элемента, запаздывания
5 предварительного смещения от действующего тангенциального усилия, первого упругого и второго, в том числе и знакопеременного, возвратов подвиж ного элемента при-перемещениях его
0 в зоне предварительного смещения и исключения скачков силы трения при пульсирующих усилиях в контакте, т.е. от действия вибрапий различного направления .
55
Формула изобретения
Устройство для моделирования пары трения, содержащее первый сумматор,
блок извлечения квадратного корня, первый, второй и третий инверторы, первый.и второй интеграторы, первый, второй, третий и четвертый блоки умножения, первый блок деления, первый и второй компараторы, первые входы сравнения которых объединены и подключены к выходу устройства по сигналу скерости перемещения подвиж- ного элемента, первые сигнальные входы компараторов подключены соответственно к входу и выходу первого инвертора, вторые сигнальные входы и вторые входы сравнения первого и второго компараторов соединены соот- ветственно с выходом и входом второго инвертора, соединенного с выходом блока извлечения квадратного корня, первый и второй выходы перво- го компаратора подключены соответственно к -первым входам задания ограничения первого и второго интеграторов, вторые входы задания ограничения которых соединены соответственно с первым и вторым выходами второго компаратора, выход блока извлечения квадратного корня соединен с входом делителя первого блока деления, выход которого подключен к информационному входу второго интегратора, вход первого инвертора объединен с первым входом первого блока умножения и подключен к выходу устройства по сигналу действующего нормального усилия,отличающее с я тем, что, с .целью повышения точности моделирования и расширения функциональных возможностей за счет учета зависимости силы упру- гофрикциоиного сопротивления в контакте пары от изменений действующих одновременно тангенциального и нормального усилий, в него введены втоой и третий сумматоры, третий интегратор , второй и третий блоки деления, блок выделения модуля и интегросум- матор, первый информационный вход которого подключен к входу устройства задающего значения сигнала действующего тангенциального усилия, а выход соединен с его вторым инфор
5
0
5
0
5
0
5
0
мационным входом, выходом устройства по сигналу скорости перемещения подвижного элемента, информационным входом первого интегратора и вторым входом первого блока умножения, выходы первого и второго блоков умножения подключены соответственно к первому и второму входам сумматора, выход которого соединен с входом выделения модуля и первым входом первого сумматора, второй и .третий входы которого подключены соответственно к выходам второго блока деления и третьего блока умножения, а выход первого сумматора соединен с входом делимого первого блока деления, вы- ход второго интегратора соединен с третьим информационным входом интег- росумматора и входом делимого третьего блока деления, входы делителей второго и третьего блоков деления подключены к входу второго инвертора, выход третьего блока деления соединен с первым входом третьего блока умножения и первым входом третьего сумматора, выход первого интегратора подключен к выходу устройства по сигналу предварительного смещения подвижного элемента, первому входу второго блока умножения и второму входу третьего сумматора, выход которого соединен с первым входом четвертого блока умножения, который вторым входом подключен к выходу блока выделения модуля, а выходом соединен с входом делимого второго блока деления, вход задания значения сигнала скорости изменения действующего нормального усилия устройства подключен к второму входу второго блока умножения и через третий инвертор соединен с вторым входом третьего блока умножения и инфор- ма11ионным входом третьего интегратора, вход задания начальных условий интегрирования которого подключен к входу задания значения сигнала начального значения нормального усилия устройства а выход соединен с выходом устройства по сигналу действующего нормального усилия и с входом блока извлечения квадратного корня.
| Устройство для моделирования силы трения | 1986 |
|
SU1399779A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования силы трения | 1987 |
|
SU1543427A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
