Изобретение относится к области радиотехники и может быть использовано при проектировании несущих конструкций радиоэлектронной аппаратуры.
Цель изобретения - повышение надежности и удобств эксплуатации и расширение области применения за счет обеспечения гарантированной фиксации субблоков в заданном положении, максимально удобном для оператора, и использования блоков не только в условиях гравитации, но и при ее полном или частичном отсутствии,
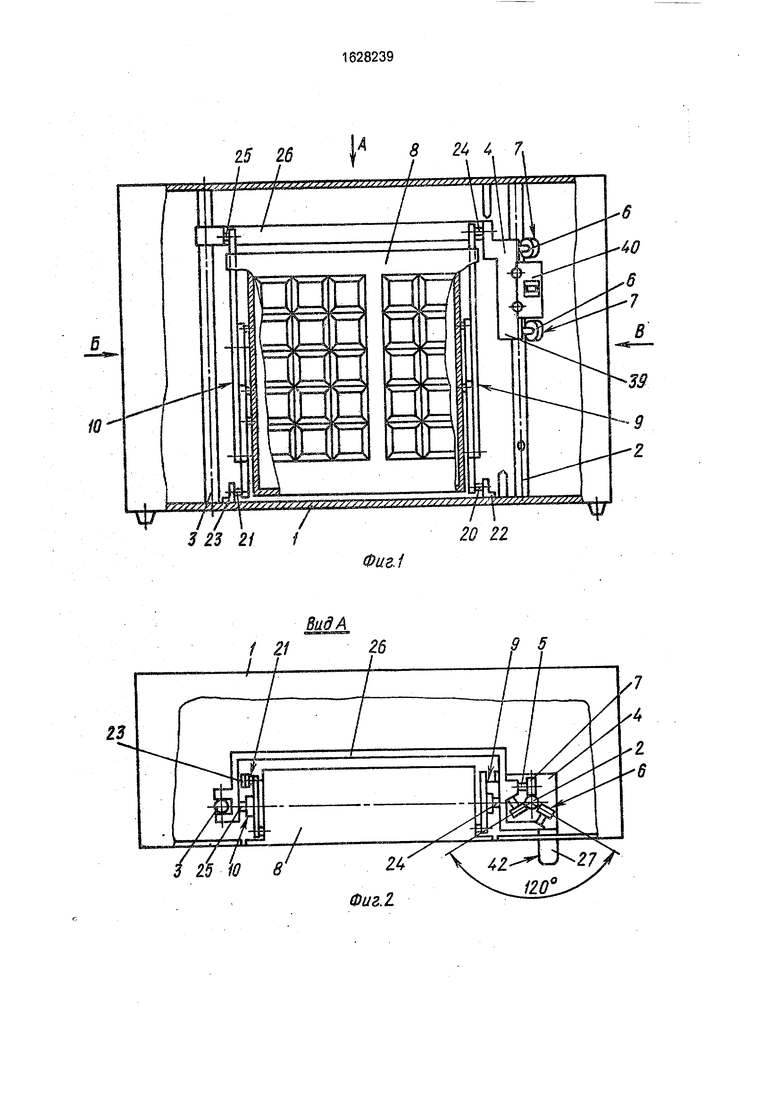
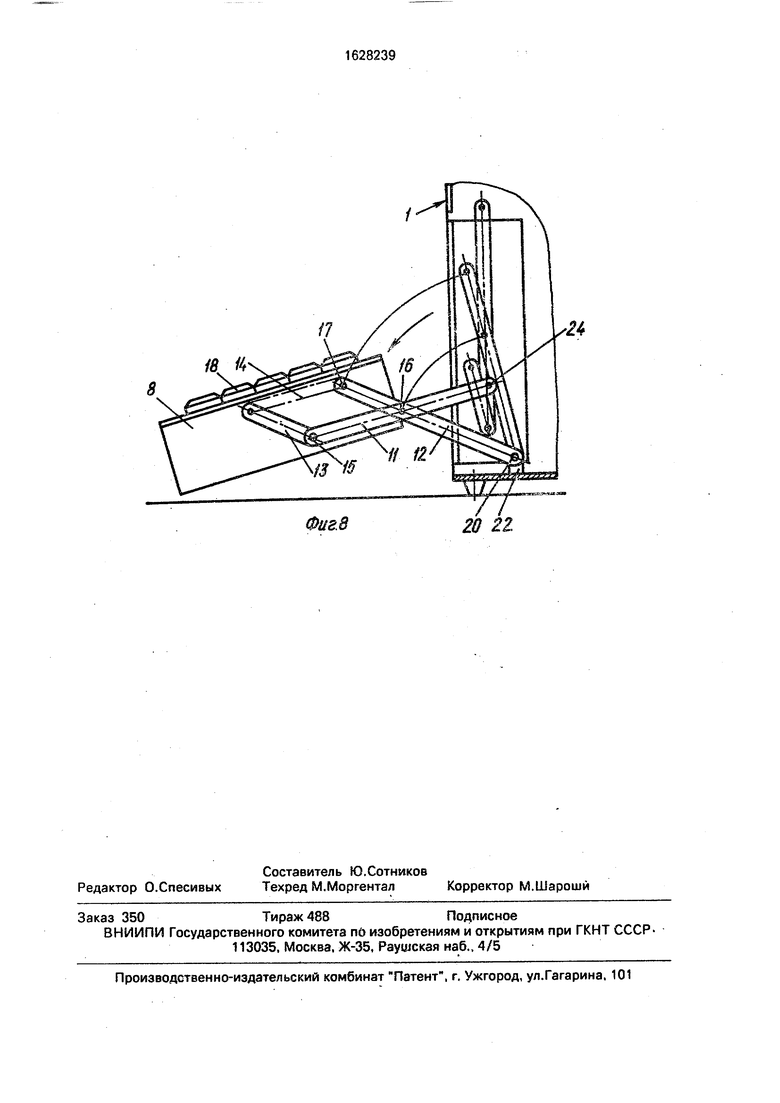
На фиг.1 изображен общий вид радиоэлектронного блока; на фиг.2 - вид по стрелке А на фиг. 1; на фиг,3 - вид по стрелке Б на фиг 1; на фиг.4 - вид по стрелке В на фиг.1; на фиг.5 - узел i на фиг,4: на фиг.б - то же, при промежуточном положении каретки; на фиг.7 - то же, при крайнем нижнем положении каретки; на фиг.8 - общий вид радиоэлектронного блока при выдвинутом и зафиксированном положении субблока, вид сбоку; на фиг.9 - узел поворота и перемещения субблока в аксонометрии.
Радиоэлектронный блок содержит корпус 1, вертикально расположенные в корпусе 1 цилиндрические направляющие 2 и 3, установленную на направляющих 2 и 3 каретку 4, имеющую одну степень свободы, а именно перемещение вдоль направляющих. Для уменьшения износа направляющих и снижения трения при движении каретки по направляющим на каретке 4 закреплены на осях-эксцентриках 5 две группы 6 роликов 7, расположенных под углом 120° друг к другу о каждой группе и охватывающих без зазора цилиндрическую направляющую 2,
Субблок 8 подвешен к каретке 4 и шар- нирно соединен с корпусом 1 радиоэлектронного блока при помощи двух идентичных и зеркально расположенных относительно боковых граней субблока механизмов шарнирного параллелограмма 9 и 10, каждый из которых состоит из звеньев 11-14, шарнир- но соединенных между собой при помощи осей 15-18. Роль звеньев 14 выполняют боковые грани субблока 8, на каждой из которых закреплены оси 17 и 18 шарнирных параллелограммов 9 и 10, Звенья 12 шарнирных параллелограммов 9 и 10 жестко соединены между собой при помощи стержня 19, образуя единую деталь, шарнирно закрепленную а корпусе 1 при помощи со- осных осей 20 и 21, а также опор 22 и 23. Звенья 11 механизмов шарнирных параллелограммов 9 и 10 шарнирно соединены с кареткой 4 при помощи соосных осей 24 и 25, закрепленных соответственно на каретке 4 и ее дополнительном выступе 26. В
каретке 4 размещен стопор 27, состоящий из двуплечего рычага 28, закрепленного на оси 29 с возможностью ограниченного поворота вокруг оси, двух идентичных подпружиненных пальцев 30 и 31, установленных в каретке 4 с возможностью возвратно-поступательного перемещения вдоль своих продольных осей и взаимодействия с двумя прорезями (или отверстиями) 32 и 33, выпол0 ненными на направляющей 2 в соответствующих местах. Рычаг 28 стопора выполнен с двумя одинаковыми и симметрично расположенными относительно его продольной оси выступами 34 и 35. Каждый из пальцев
5 30 и 31 имеет упор 3.6 и 37 соответственно, при помощи которого каждый из них взаимодействует с рычагом 28 стопора, а именно с его выступами 34 и 35. Пальцы 30 и 31 подпружинены при помощи идентичных
0 пружин 38 сжатия, Для облегчения сборки стопора 27 каретка 4 имеет разъем по плоскости размещения пальцев 30 и 31 и состоит таким образом из двух частей: корпуса 39 и крышки 40 (фиг.1). Ограничение поворота
5 рычага 28 стопора осуществляется за счет прорези 41, выполненной в каретке 4, в которой располагается плечо 42 рычага 28, размещенное со стороны обслуживания. Ограничение перемещений каретки 4
0 вдоль направляющих осуществляется двумя регулируемыми упорами 43 и 44, установленными вдоль направляющей 2 и взаимодействующими с корпусом каретки 4 (фиг.4). В исходном состоянии элементы блока
5 находятся в следующем положении.
Субблок 8 с органами управления установлен в корпусе 1 радиоэлектронного блока при помощи осей 17 и 18, звеньев 11-13 шарнирно соединенных между собой и об0 разующих с субблоком 8 два механизма шарнирных параллелограммов 9 и 10, расположенных зеркально относительно боковых граней субблока и шарнирно соединенных с корпусом 1 и кареткой 4.
5 Каретка 4 находится в верхнем крайнем положении и зафиксирована от самопроизвольного перемещения вдоль направляющих 2 и 3 стопором 27 и регулируемым упором 43. Палец 30 стопора 27 под
0 действием пружины 38 сжатия находится во взаимодействии с прорезью 32 направляющей 2, а палец 31 стопора 27 упирается в цилиндрическую поверхность направляющей 2, не препятствуя перемещению карет5 км.
Чтобы выдвинуть субблок 8 из корпуса 1 радиоэлектронного блока а рабочее положение, необходимо расфиксировать каретку 4, для чего нужно нажать сверху вниз на плечо 42 рычага 28 стопора 27. Рычаг 28
повернется вокруг оси 29, его выступ 34 придет во взаимодействие с упором 36 подпружиненного пальца 30 и под действием усилия руки оператора вытолкнет палец 30 из прорези 32 направляющей 2, дополни- тельно сжимая пружину 38 сжатия. Каретка 4 расфиксирована и под действием усилия руки оператора, приложенного к плечу 42 рычага 28 сверху вниз, начнет перемещаться вниз по направляющим 2 и 3. Плечо 42 рычага 28 упирается в стенку прорези 41 каретки 4, в результате чего рычаг 28 не может повернуться вокруг оси 29 и полностью передает приложенное к нему усилие каретке 4. Движение каретки 4 вниз по на- правляющим 2 и 3 сопровождается перемещениями шарнирно связанных с кареткой звеньев 11, а следовательно, и остальных звеньев 12-14 механизмов шарнирных параллелограммов 9 и 10. Субблок 8, выполня- ющий роль одного из звеньев (в данном случае, звена 14) механизмов шарнирных параллелограммов 9 и 10, выдвинется из корпуса 1 радиоэлектронного блока и начнет изменять свое положение от верти- кального до горизонтального, приближаясь к плоскости стола.
Движение каретки, а значит и субблока, прекратится, когда она, двигаясь по направляющим 2 и 3, упрется в регулируемый упор 44, произойдет совмещение пальца 31 с прорезью 33 на направляющей 2, который под действием пружины 38 сжатия, придет во взаимодействие с прореью 33 и зафиксирует каретку 4 от самопроизвольных пере- мещений вдоль направляющих 2 и 3. Фиксация каретки определяет фиксацию и субблока 8, который при крайнем нижнем положении каретки 4 занимает рабочее положение, а именно субблок 8 максимально приближается к поверхности стола и под небольшим углом (около 15°) к ней, выдвигаясь полностью за пределы корпуса 1 радиоэлектронного блока и на нужное расстояние от него (в зависимости от соот- ношения длин звеньев шарнирного параллелограмма).
Чтобы вернуть субблок 8 в исходное положение, необходимо расфиксировать каретку 4, для чего нужно нажать снизу вверх на плечо 42 рычага 28 стопора 27 и, преодолевая сопротивление пружины сжатия 38, вывести палец 31 из зацепления с прорезью 33, повернув до предела плечо 42 рычага 28. Каретка 4 , расфиксируется и под действием усилия руки оператора, приложенного к плечу 42 рычага 28 снизу вверх, начнет перемещаться вверх по направляющим 2 и 3.
Плечо 42 рычага 28 упирается в стенку прорези 41 каретки 4, в результате чего рычаг 28 не может повернуться вокруг оси 29 и полностью передает приложенное к нему усилие каретке 4. Движение каретки 4 вверх по направляющим 2 и 3 сопровождается перемещениями шарнирно связанных с кареткой звеньев механизмов шарнирных параллелограммов 9 и 10, а значит и субблока 8, который начнет изменять свое положение от горизонтального до вертикального. Движение каретки 4, а значит, и субблока 8 прекратится, когда она двигаясь по направляющим 2 и 3, упрется в регулируемый упор 43, произойдет совмещение пальца 30 с прорезью 32 на направляющей 2, и он под действием пружины 38 сжатия придет во взаимодействие с прорезью 32, зафиксирует каретку 4 от самопроизвольных перемещений вдоль направляющих 2 и 3. Фиксация каретки 4 определяет фиксацию и субблока 8, который при крайнем верхнем положении каретки занимает исходное (вертикальное и вдвинутое в корпус) положение.
Снабжение каждого узла перемещения и поворота субблока кареткой, установленной на направляющих корпуса с возможностьювозвратно-постунательногоперемещения, а также выполнение одних из пересекающихся звеньев каждого механизма шарнирного параллелограмма разной длины и шарнирное соединение их соответственно с кареткой и с корпусом блока позволило повысить надежность и удобства эксплуатации радиоэлектронного блока и расширить область его применения.
Формула изобретения
Радиоэлектронный блок, содержащий корпус с направляющими, размещенные в корпусе субблоки и узлы перемещения и поворота субблоков, каждый из которых выполнен в виде пары механизмов шарнирного параллелограмма, установленных параллельно один относительно другого и шарнирно соединенных одними своими параллельными звеньями с соответствующим субблоком, отличающийся тем, что, с целью повышения надежности и удобств эксплуатации и расширения области применения, каждый узел перемещения и поворота субблока снабжен кареткой, а одни из пересекающихся звеньев каждого механизма шарнирного параллелограмма того же узла выполнены разной длины и шарнирно соединены соответственно с корпусом и с кареткой данного узла, установленной с возможностью возвратно-поступательного перемещения на направляющих корпуса,
S 6
to. Mi
H
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиоэлектронный блок | 1987 |
|
SU1499531A1 |
| Радиоэлектронный блок | 1983 |
|
SU1129751A1 |
| Автомат для гибки изделий из проволоки | 1989 |
|
SU1641490A1 |
| Устройство для удаления деталей из зоны обрабатывающей машины | 1986 |
|
SU1362576A1 |
| Ремизоподъемная каретка | 1974 |
|
SU647371A1 |
| Радиоэлектронный блок | 1988 |
|
SU1497775A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1134264A1 |
| Радиоэлектронный блок | 1983 |
|
SU1132376A1 |
| Автоматическая линия штамповки деталей из рулонного материала | 1989 |
|
SU1625565A1 |
| Машина для подвязки растений к шпалерной проволоке | 1986 |
|
SU1373361A1 |

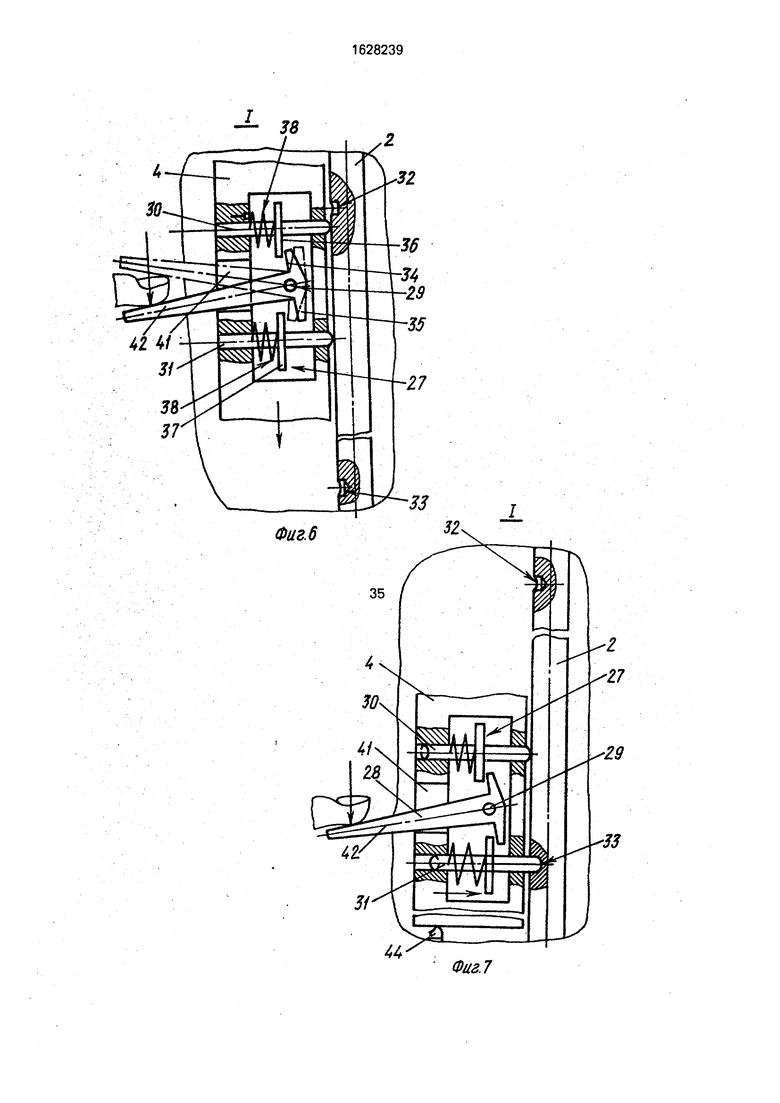
Изобретение относится к радиотехнике и может быть использовано в несущих конструкциях радиоэлектронной аппаратуры. Цель изобретения - повышение надежноjI j 25 п сти и удобств эксплуатации и расширение области применения - достигается за счет того, что в радиоэлектронном блоке, содержащем корпус 1 с направляющими 2,3, субблоки 8 (на чертеже показан один субблок) и узлы перемещения и поворота субблоков, каждый из которых выполнен в виде пары механизмов 9, 10 шарнирного параллелог- рамма.соединенных своими звеньями 12,13 с соответствующим субблоком 8, каждый из узлов перемещения и поворота субблоков снабжен кареткой 4, установленной с возможностью возвратно-поступательного перемещения на направляющих 2,3, а звенья 11. 12 каждого из механизмов 9, 10 выполнены разной длины и шарнирно соединены с кареткой 4 и с корпусом 1.9 ил. --г О Ю 00 N3 О) О зз Фиг. 9 го -гг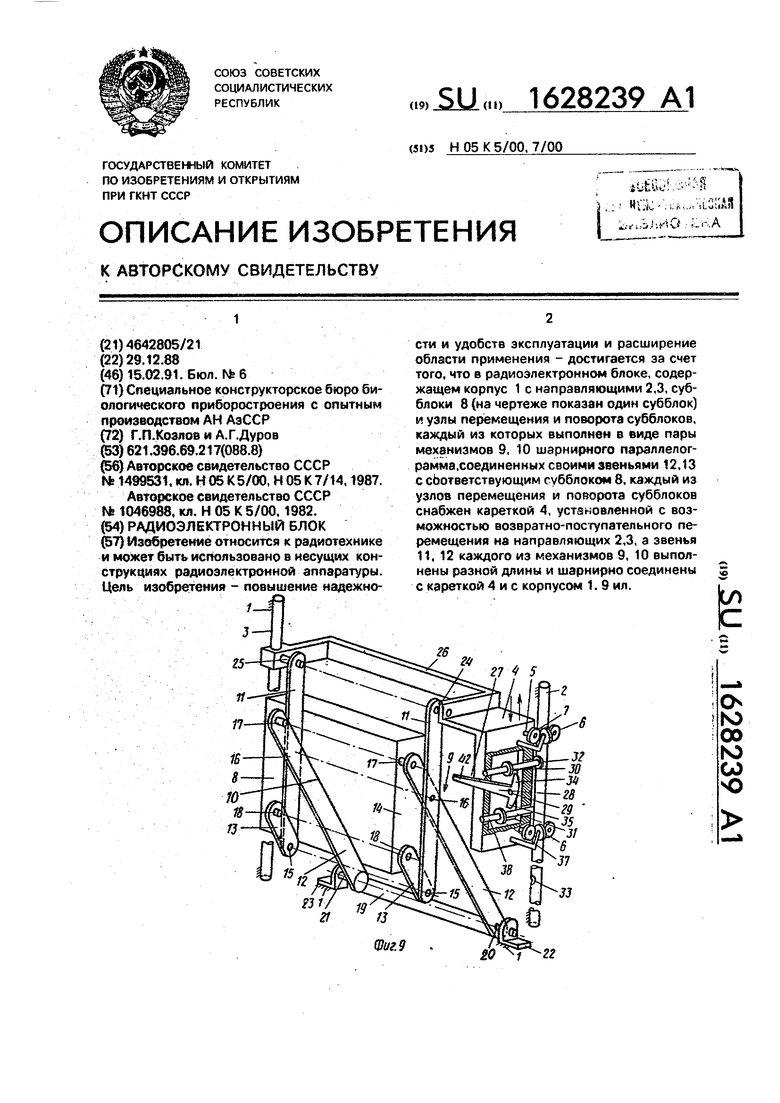
f-эпф
6Е38Ш
вид 6
38
в ид В
Фиг. 5
и
Фаг.7
8
Фиг.8
| Радиоэлектронный блок | 1987 |
|
SU1499531A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для выдвижения и фиксации блоков | 1982 |
|
SU1046988A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
