Изобретение относится к технике для изготовления изделий из проволоки и может быть использовано, например, для изготовления перемычек выводов низковольтной электронной аппаратуры.
Цель изобретения - повышение надежности и упрощение конструкции.
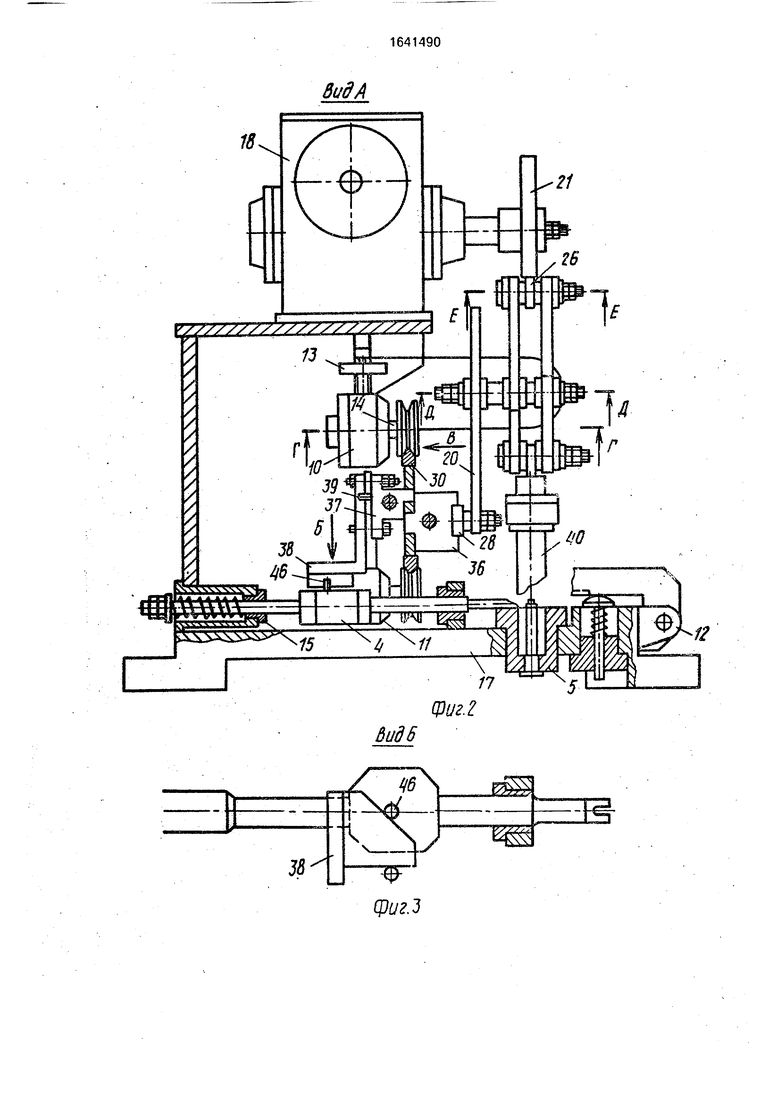
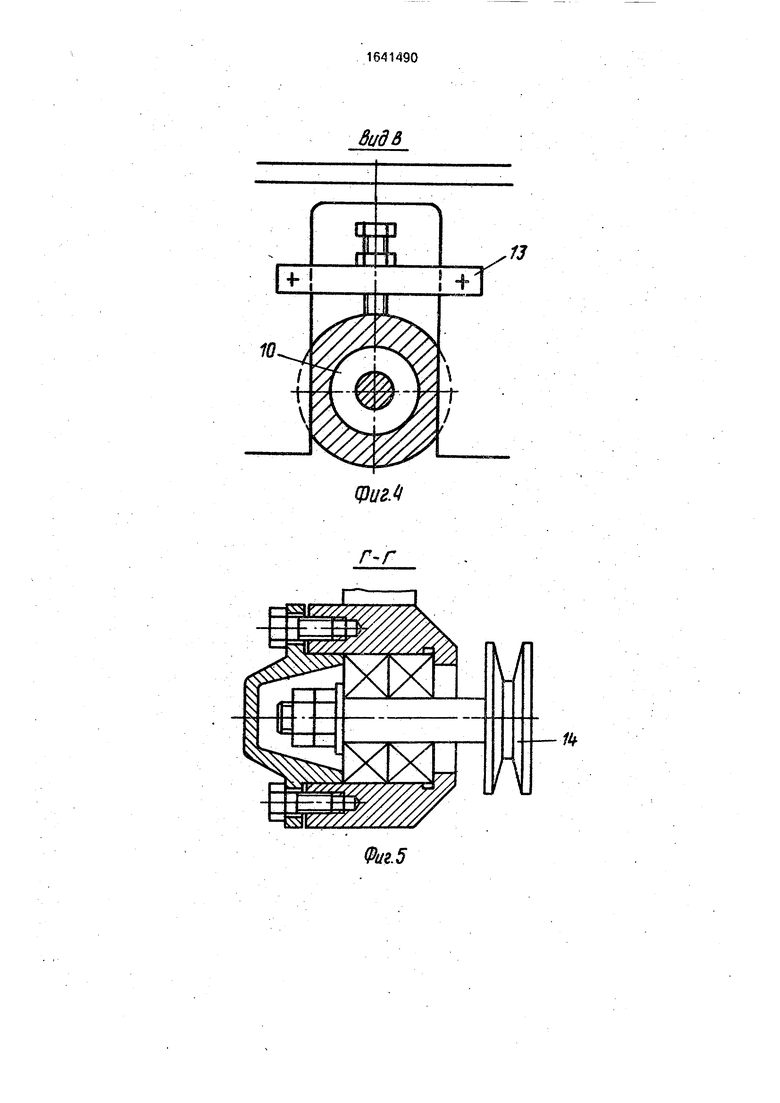
На фиг.1 представлен автомат в исходном положении, общий вид; на фиг 2 - вид А на фиг.1; на фиг.З - вид Б на фиг.2, на фиг,4- вид В на фиг.2; на фиг,5 - разрез Г - Г На фиг.2; на фмг.6 - разрез Д - Д на фиг 2; на фиг.7 - разрез Е - Е на фш .2; на фмг.8 - разрез Ж - Ж на фиг. 1; на фиг.9 - разрез 3- 3 на фиг.8.
Автомат для гибки изделий из проволоки содержит опорную плиту 1, привод, катушку 2 для провода 3, механизмы подачи, гибки и резки провода 3, а также подпружиненный сбрасыватель 4.
На опорной плите 1, в центре которой выполнены отверстия для втулки 5 со ступенчатым отверстием и сквозной паз 6, соответствующим образом выставлены и закреплены болтами стойка 7, кронштейны 8 и9 и корпуса Подшипниковых узлов 10 и 11, Кроме того, к торцу опорной плиты приварены проушины 12, в отверстиях которых запрессованы втулка.
Стойка 7. выполненная в виде П-образ- ной сварной конструкции, имеет переднюю и заднюю стенки, связанные горизонтальной поперечиной.
В центре передней стойки 7 имеется вертикальный паз для подвижного закрепления с помощью резьбовой планки 13 и регулировочного болта корпуса 10 подшипникового узла для аала 14, выполненного за одно целое с катком, а в отверстие задней с генки стойки 7 запрессована втулка 15 со ступенчатым сквозным отверстием, при этом симметрично вертикальному пазу на передней стенке приварены щеки, в. отверстиях которых запрессованы втулки 16. В кронштейне 8, который закреплен в непосредственной близости от стойки 7, имеется горизонтальное отверстие, а в отверстие кронштейна 9, закрепленного в центре опорной плиты 1, запрессована втулка, высташ внная соосно с отверстием втулки 5. В подшипниках корпусов 11, которые закреплены по обе стороны от втулки 5, расположены валы 14 с катками, а в отверстие проушины, приваренной по центру плиты 1, запрессована втулка 17 соосно с отверстием втулки 15.
В состав привода входят червячный редуктор 18, к которому прифланцованы электродвигатель 19, параллелограмм и подвижный рычаг 20.
На выходном валу червячного редуктора 18, который закреплен на поперечине стойки 7, насажен кулачок 21.
Параллелограмм, состоящий из шарнирно связанных звеньев, содержит горизонтальные и вертикальные шарниры, при этом горизонтальные шарниры 22 и 23, связанные пружиной 24 растяжения, закреплены в отверстиях скалок 25, расположенных во
втулках 16 щек стойки 7, а между звеньями параллелограмма на верхнем вертикальном шарнире установлен шарикоподшипник 26 с возможностью взаимодействия с кулачком 21. Кроме того, на одной из скалок 25 консольно с онтирован шарикоподшипник 27.
Торец верхнего конца рычага 20, который с помощью втулки свободно насажен на горизонтальный шарнир 22 параллелограмма, используется в качестве опорной поверхности
с возможностью взаимодействия последней с шарикоподшипником 27 противоположной скалки 25, я на другом конце рычага консольно закреплен шарикоподшипник 28. Мех&низм подачи провода содержит
подвижный зажим 29 одностороннего действия, смонтированный на кронштейне каретки 30, и неподвижный зажим 31с кронштейном, закрепленным на опорной плите 1.
8 сох гзв зажимов 29 и 31, конструкции
которых аналогичны, входят шарики, установленные с одноименной возможностью взаимодействия с поверхностями конусной втулки соот зетствующего зажимай провода
3, при этом зажимы при сборке развернуты на 180°. По торцам каретки 30 механизма подачи, которая имеет сквозные горизонтально расположенные пазы, V-образные направляющие и кронштейн подвижного
зажима 29, болтами закреплены щеки с отверстиями.
Отверстия щек каретки 30, V-образные направляющие которой расположены горизонтально с возможностью взаимодействия
с катками валов 14, используются для установки винтов 32 и 33 и регулировочного болта 34 с гайками и пружиной 35 сжатия, закрепленного в отверстии кронштейна 8.
Резьба винта 32 используется для размещения гайки 36, установленной с возможностью взаимодействия с шарикоподшипником 28 рычага 20, а резьба винта 33 - для гайки 37, на которой смонтирован поворотный кулачок 38 и запрессован палец 39, размещенный с возможностью контакта с торцом последнего, при этом выступы гаек 36 и 37 расположены в горизонтальных пазах каретки 30.
Механизм гибки содержит пуансон 40, выполненный в виде втулки с геликоид ной поверхностью и упором 41, атакже оправку 42,
Пуансон 40, цилиндрическая поверхность которого расположена в отверстии . втулки кронштейна 9, выполнен с отверстием в его проушине для кинематической связи с нижним вертикальным шарниром параллелограмма. Оправка 42, которая запрессована в отверстии втулки 5 и выставлена соосно с пуансоном 40, изготовлена в виде ступенчатого стержня с верхним концом, выполненным по внутреннему диаметру кольца из провода 3, а диаметр его средней части со- ответствует наружному диаметру кольца из провода 3.
В состав механизма резки входят соответствующим образом выставленные и закрепленные винтами в сквозном пазу 6 плиты 1 неподвижный кронштейн 43 и подпружиненный нож 44. На шлифованной поверхности кронштейна 43 выполнено отверстие 45, диаметр которого соответстеует диаметру провода 3. а ось подпружиненного ножа 44 установлена во втулках 12 плиты 1,
Корпус подпружиненного сбрасывателя 4 имеет глухое отверстие для установки на подшипниках пальца 46, размещенного с возможностью взаимодействия с кулачком 38, и две цилиндрические направляющие для размещения последних в стдерстиях втулок 15 и 17, при этом на конце цилиндрической направляющей, развернутой в сторону оправки 42, выполнены паз по диаметру верхнего ее конца и наклонные поверхности.
Для ориентации при работе сбрасывателя 4 применен стопорный винт (не показан).
Кроме того, в состав предлагаемого автомата для гибки проволоки входит система электроавтоматики, снабженная соответствующими датчиками (не показаны).
Перед включением в работу автомата осуществляют регулировку его механизмов на соответствующий размер проволоки и проводят заправку проволоки. Регулировку механизмов автомата осуществляют вращением вин- тог 32 и 33, а также гаек регулировочного болта 34, при этом гайка 36, поворотный кулачок 38 и гайка болта 34 фиксируются в определенных положениях.
Заправку проволоки производят при ос- тановленном электродвигателе 19, когда каретка 30 находится в крайнем левом положении, при этом проволока 3 продевается через зажимы 29 и 31 механизма подачи и отверстия 45 в кронштейне 43.
Перед включением автомата в работу его механизмы находятся в исходном положении, при котором кулачок 21 привода расположен так, что шарикоподшипник 26 параллелограмма, взаимодействуя с его профильным торцом.
расположен в крайнем верхнем положении, скалки 25 горизонтальных шарниров 22 и 23 усилием пружины 24 растяжения сведены к центру, подвижной рычаг 20 вследствие взаимодействия с шарикоподшипником 27 повернут почасовой стрелке, сбрасыватель 4 усилием пружины сжатия переведен в сторону от втулки 5 плиты 1, а пуансон 40 совместно с упором 41 находится в крайнем нижнем положении. При этом а результате контакта гайки 36 с шарикоподшипником 28 каретка 30 механизма подачи переведена в крайнее левое положение.
Вследствие вращения кулачка 21, при включении электродвигателя 19, шарикоподшипник 26, отслеживая профиль кулачка, опускается, а горизонтальные шарниры 22 и 23, растягивая пружину 2й, перемещают скалки параллелограммы во втулках 16 в противоположных направлениях от центра. При этом вертикальные шарниры параллелограмма сближается вследствие изменения его контура и пуансон 40 поднимается, а подвижный рычаг 20 совместно с шарикоподшипником 28 проворачивается против часовой стрелки, на значительный угол, так как шарикоподшипники 27 счалки параллелограмма и шарнир движутся р противоположных направлен -.:.
Перемещение шарикоподшипника 28 по- движного рычага 20 преобразуется усилием пружины 35 сжатия а горизонтальное движение каретки 30 по каткам валов 14 в сторону втулки 5 плиты 1, которое прекращается при контакте каретки с заранее выставгенной гайкой регулировочного болта 34. Вместе с кареткой 30 движется поворотным кулачок 38 и подвижный зажим 29, который подает проволоку 3 к оправке 42, расположив последнюю в непосредственной близости от цилиндра верхнего ее конца, при этом пуансон 40 поднят и освобождает .есто для проволоки 3.
Псс.ле остановки каретки 30 подвижный рычаг 20 продолжает поворот, чек достигается гарантированный зазор между шарикоподшипником 28 и гайкой 36. Затем вертикальные шарниры параллелограмма вследствие вращения кулачка 21 расходятся, а горизонтальные шарниры 2Г и 23 сходятся к центру.
При движении совместно с кареткой 30 поворотного кулачка 38 наклонная поверхность вступает во взаимодейстгие с пэль цем 46, перемещзч подпружиненный сбрасыватель f в сторону оправки 42, при этом повороту кулачка 38 препятствует его контакт с запрессованным п эльцем 39, После окончания контакта пальца 45 с поверхно- -стью поворотного кулачка 38. при движении
каретки 30 вправо, сбрасыватель 4 усилием пружины сжатия возвращается в исходное положение.
В результате перемещения сбрасывателя 4 в сторону оправки 42 ее верхний конец располагается в пазу сбрасывателя, при этом наклонная поверхность сбрасывателя снимает кольцо, заранее изготовленное из проволоки 3 которое сдувается воздухом в специальную тару (не показано).
Перемещение вниз нижнего шарнира параллелограмма передается пуансону 40, цилиндрическая геликоидная поверхность которого входит в отверстие втулки 5 плиты 1, при этом его рабочая поверхность, воздействуя на конец проволоки 3, изгибает ее в кольцо вокруг верхнего конца оправки 42.
В конце рабочего хода пуансона 40 упор 41, упираясь в торец подпружиненного ножа 44, поворачивает последний при этом осуществляется отрезка готовой детали от проволоки 3.
Одновременно с движением вниз пуансона 40 подвижный рычаг 20 поворачивается по часовой стрелке на большой угол при относительно малом ходе пуансона. Большой угол поворота подвижного рычага 20 совместно с шарикоподшипником 28 вызван встреч- ным совместным движением горизонтального шарнира 22 и шарикоподшипника 27 противоположной скалки параллелограмма.
При повороте подвижного рычага 20 по часовой стрелке шарикоподшипник 28 первоначально выбирает зазор между гайкой 36, а затем вступает во взаимодействие с последней, при котором каретка 30 перемещается влево, возвращаясь в исходное положение. Во время возвращения каретки 30 в исходное положение поворотный кулачок 38, соприкоснувшись с консольным пальцем 46 сбрасывателя 4, поворачивается, а при прохождении последнего под действием собственной массы возвращается в первоначальное вертикальное положение.
При движении каретки 30 влево неподвижный одностороннего действия зажим 31 удерживает конец проволоки 3, препятствуя его перемещению от воздействия шариков движущегося зажима 29. После возвращения каретки 30 механизма подачи в исходное положение при включенном электродвигателе 19 цикл повторяется в автоматическом режиме.
По сравнению с прототипом предлагаемый автомат для гибки проволоки более надежен и имеет более простую конструкцию вследствие использования механизма
параллелограмма и подвижного рычага в составе привода вместо зубчато-реечных пе-. редач, барабана и механизма его поворота.
Формула изобретения
1.Автомат для гибки изделий из проволоки, содержащий размещенные на основании привод, катушку для проволоки и кинематически связанные механизм резки, механизм гибки с неподвижным и подвижным гибочными элементами и механизм подачи с неподвижным и подвижным зажимами, из которых подвижный смонтирован на каретке, установленной с возможностью перемещения вдоль оси подачи провопоки, отличающийся тем, что, с целью повышения надежности и упрощения конструкции, он дополнительно снабжен размещенным в
направляющих основания подпружиненным сбрасывателем с консольно установленным пальцем, а в состав привода автомата входят приводной кулачок, параллелограмм, шарниры которого установлены
с возможностью вертикального и горизонтального перемещения, две скалки, размещенные в направляющих станины с возможностью горизонтального возвратно-поступательного перемещения и посредством осей шарнирно
связанные с установленными с возможностью горизонтального перемещения шарнирами параллелограмма, размещенный на одной из скалок контактный ролик, смонтированный на оси второй скалки двуплечий
рычаг с размещенным на одном из его плеч контактным роликом, и смонтированные на боковых сторонах каретки регулируемые винтовые передачи, гайки которых установлены с возможностью взаимодействия с контактным роликом двуплечего рычага и пальцем сбрасывателя, при этом шарниры параллелограмма, установленные с возможностью горизонтального перемещения, связаны пружиной растяжения, верхний шарнир параллелограмма, установленный с возможностью вертикального перемещения, смонтирован с возможностью взаимодействия с приводным кулачком, а нижний шарнирно связан с подвижным элементом механизма гибки,
причем второе плечо двуплечего рычага установлено с возможностью взаимодействия с контактным роликом скалки.
2.Автомат по п.1,отличающийся тем, что на одной из гаек винтовой пары
каретки смонтирован кулачок, установленный с возможностью взаимодействия с пальцем сбрасывателя.
&
г
Ъ
ч
и
I
2;
8идВ


| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для гибки проволоки | 1989 |
|
SU1664444A1 |
| Устройство для гибки петли из проволоки | 1989 |
|
SU1745397A1 |
| Автомат для сборки деталей типа вал-втулка | 1989 |
|
SU1719187A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| Автомат для изготовления гнутых изделий | 1986 |
|
SU1400739A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ШПИЛЕК | 1967 |
|
SU190321A1 |
| Автомат для подачи и сборки деталей | 1980 |
|
SU959982A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ГВОЗДЕЙ | 1992 |
|
RU2019351C1 |


Изобретение касается изготовления деталей из проволоки, может быть использовано для изготовления перемычек выводов электронной аппаратуры и позволяет повысить надежность и упростить конструкцию 7 I/, , L r-29Jf4 6 9 Фаг 1 J Ж автомата. Проволока 3 подается в механизм гибки подвижным зажимом 29, смонтированным на каретке 30 механизма подачи, направляющие которой расположены между катками. Б качестве привода каретки 30, гибочного пуансона 40 и сбрасывателя используются параллелограмм и подвижный рычаг 20. В месте с кареткой 30 перемещаются в определенной последовательности сбрасыватель и пуансон 40, цилиндрическая гелико- идная поверхность .торого при движении вниз воздействует на поданную проволоку 3 и изгибает ее в кольцо вокруг оправки 42 при дальнейшем движении пуансона 40, после чего готовая деталь отрезается подпружиненным ножом. 1 з.п.ф-лы, 9 ил. 18
ЩигМ
Фив. 5
о a
«r
o
i
SSs
jyvMof frjSNi-V.h
SS aZM-IESSSii 2S2S
SSSs
/A
Uj
4i
1
ь
1
p
GO
I
.9
| Автомат для гибки проволоки | 1976 |
|
SU604612A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
