Н Ь
Изобретение относится к машиностроению и может быть использовано в приводах машин для автоматического бесступенчатого изменения частоты вращения и вращающего момента ведомого вала в зависимости от нагрузки.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения изменения величины передаваемого вращающего момента.
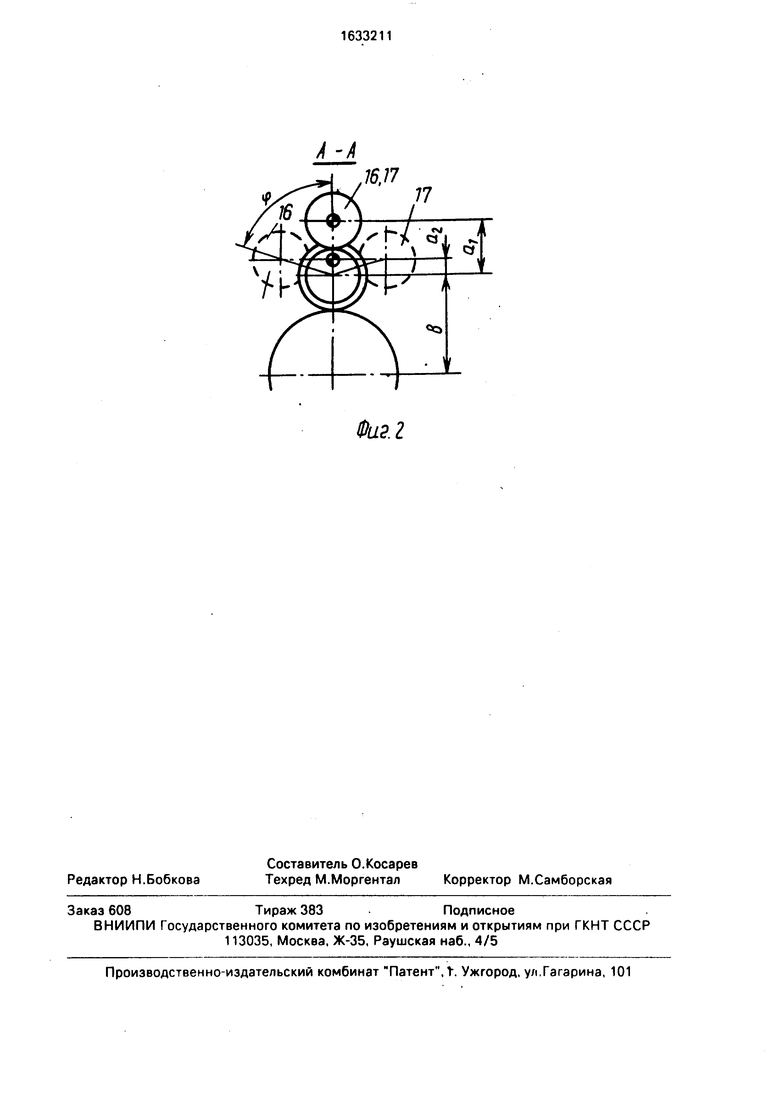
На фиг.1 изображена кинематическая схема инерционной передачи, вид сбоку; на фиг.2 - разрез А-А на фиг.1.
Инерционная передача содержит корпус 1, в котором в опорах размещены ведущий 2 и ведомый 3 валы. Водило 4 скреплено с ведущим валом 2 и несет размещенные в опорах, противолежащих одна другой, оси 5 и 6, на которых установлены в опорах, основные сателлиты 7 и 8 и скрепленные с ними промежуточные сателлиты 9 и 10. Дополнительные сателлиты 11 и 12 закреплены на осях 5 и 6.
Центральные зубчатые колеса 13 и 14 сцеплены с основными сателлитами 7 и 8. Колесо 13 закреплено на ведомом валу 3, а колесо 14 соединено с корпусом 1 посредством тормоза 15, связанного с системой управления (не показана).
Инерционные грузы расположены на кривошипах эксцентрично осям 5 и б и выполнены в виде шестерен 16 и 17, которые имеют самотормозящиеся в одном из направлений зацепления с промежуточными сателлитами 9 и 10 и установлены в опорах, закрепленных на осях 5 и 6. Шестерни 16 и 17, размещенные на Двух противолежащих одна другой осях 5 и 6, образуют один комплект инерционных грузов, общий центр масс которого эксцентричен осям 5 и 6. Передача имеет несколько комплектов, каждый из которых включает несколько шестерен 16 и 17.
Центральное зубчатое колесо 13, основные 7 и промежуточные 9 сателлиты, ось 6 и шестерни 16 образуют один планетарный ряд, а центральное зубчатое колесо 14 с основнымив и промежуточными Юсателли- тами, ось 6 и шестерни 17 образуют другой- планетарный ряд.
Дополнительное центральное зубчатое колесо выполнено по длине из двух частей 18 и 19, которые сцеплены с дополнительными сателлитами.11 и 12 и, например, посредством спиральных шлицев 20 связаны с втулкой 21, установленной в опорах в во- диле 4. Части 18 и 19 поводками 22 связаны с системой управления. При фиксированном положении поводков 22 части 18 и 19 имеют постоянное взаимное смещение в окружном направлении и представляют единое целое.
Штриховыми линиями показано положение инерционных грузов при взаимном
смещении частей дополнительного центрального зубчатого колеса, где ai стояния от оси сателлита до общего центра масс комплекта инерционных грузов, В - расстояние от оси сателлита до общей оси
0 ведущего и ведомого валов.
Инерционная передача работает следующим образом.
При вращении ведущего вала 2 с частотой 0)2 водило 4 вращается также с часто5 той 0)2 , а ведомый вал 3, преодолевая момент внешнего сопротивления, вращается с частотой (Зд , при этом 0)2 (о$ и по команде от системы управления поводки 22 зафиксированы в определенном положении
0 и тормоз 15 включен.
Инерционные грузы (шестерни 16 и 17) обкатываются по промежуточным сателлитам 9 и 10 и под действием центробежных син инерции переносного (вместе с водилом
5 4) движения стремятся занять на них положение, когда общий центр масс комплекта инер-, ционных грузов максимально удален от общей оси валов 2 и 3 и находится на линии центров основных сателлитов 7 и 8 и централь0 ных зубчатых колес 13 и 14.
При отклонении центра масс комплекта инерционных грузов от указанного положения на осях 5 и 6 появляется знакопеременный вращающий момент, который считают
5 прложительным при повороте осей 5 и 6 на угол от 0 до 180° и отрицательным при повороте на угол от 180 до 360°
Направление самоторможения шестерен 16 и 17 выбрано так, что под действием
0
положительного вращающего момента самотормозятся (блокируются) шестерни 16 и промежуточные сателлиты 9, а под действием отрицательного момента - шестерни 17 и промежуточные сателлиты 10.
5Тогда, при движении инерционных грузов к общей оси валов 2 и 3 и повороте осей 5 и 6 и общего центра масс комплекта на угол от 0 до 180° шестерни 16 блокируются с промежуточными сателлитами 9, в резуль0 тате чего положительный инерционный вращающий момент передается через основные сателлиты 7 и центральное зубчатое колесо 13 на ведомый вал 3, при этом шестерни 17 и промежуточные сателлиты 10
5 расторможены, а основные сателлиты 8 вра- щаются на осях 6 вхолостую.
При дальнейшем повороте осей 5 и 6 и общего центра масс комплекта на угол от 180 до 360° инерционные грузы удаляются
от общей оси валов 2 и 3, инерционный вращающий момент на осях 5 и 6 становится отрицательным, в результате чего шестерни 16 и промежуточные сателлиты 9 растормаживаются, шестерни 17 и промежуточные сателлиты 10 блокируются и отрицательный вращающий момент передается через основные сателлиты 8 и центральное зубчатое колесо 14 на корпус 1, создавая на нем реактивный момент, при этом основные сателлиты 7 вращаются на осях 5 вхолостую и ведомый вал 3 движется по инерции.
При дальнейшем повороте общего центра масс комплекта и осей 5 и 6 на угол от 0 до 180°инерционные грузы движутся к общей оси валов 2 и 3, инерционный врзща- ющий момент на осях 5 и 6 становится положительным, шестерни 17 и промеж/точные сателлиты 10 растормаживаются а шестерни 16 и промежуточные сателлиты 9 блокируюся, в результате чего положительный вращающий момент передается на ведомый вал 3, и цикл работы передачи повторяется При этом за полный цикл на ведомый вал 3 передаются импульсы вращающего момента одного направления, под действием которых он вращается также в одном направлении.
При увеличении момента внешнего сопротивления уменьшается частота вращения ведомого вала 3 и увеличивается частота вращения основных 7 и промежуточных 9 сателлитов, в результате чего повышается частота импульсов инерционного вращающего момента на осях 5 и 6 и увеличивается вращающий момент на ведомом валу 3.
Перевод инерционной передачи в режим динамической муфты осуществляется выключением тормоза 15 по команде от си- .стемы управления. При этом передача превращается в сооскую механическую систему без внешней опоры момента, для которой вращающие моменты на ведущем 2 и ведомом 3 валах равны при любом соотношении частот вращения указанных валов.
Изменение величины передаваемого вращающего момента осуществляется перемещением поводков 22 по команде от системы управления. При этом части 18 и 19-1
дополнительного центрального зубчатого копеса перемещаются по втулке 21, взаимодействуя со спиральными шлицами 20, поворачиваются одна относительно другой.
При этом дополнительные сателлиты 11 и 12 и оси 5 и б с опорами шестерен 16 и 17 поворачиваются относительно друг друга, в результате чего изменяется расстояние от
осей 5 и б до общего центра масс комплекта инерционных грузов (фиг.2) и соответственно изменяются радиусы относительного и переносного движения общего центра масс комплекта инерционных грузов, что обес4
печивает изменение величины передаваемого момента.
Формула изобретения Инерционная передача, содержащая корпус, соосные ведущий и ведомый валы,
соединенное с ведущим валом водило с осями, два планетарных ряда, включающий каждый центральное колесо, установленные на осях води :я с возможностью вращения и соединенные друг с другом основные
и промежуточные сателлиты, закрепленные на осях водила кривошипы с установленными на них с возможностью вращения инерционными грузами, выполненными в виде шестерен, имеющи-ч самотормозящееся в
одном из направлении лацепление с промежуточными сателлитами, и закрепленные на этих же осях дополнительные сателлиты, центральные колеса планетарных рядов предназначены для взаимодействия с соответствующими основными сателлитами и одно из них соединено с ведомым валом, а другое кинематически связано с корпусом и расположенное между планетарными рядами дополнительное центральное зубчатое
колесо для взаимодействия с дополнительными сателлитами, отличающаяся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения изменения величины передаваемого вращающего
момента, оси водила выполнены каждая из двух частей, принадлежащих разным планетарным рядам, а дополнительное центральное зубчатое колесо выполнено по длине также из двух частей, связанных одна с другой с возможностью взаимного смещения в окружном направлении.

| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционная бесступенчатая передача | 1976 |
|
SU742654A1 |
| Инерционная бесступенчатая передача | 1978 |
|
SU821824A1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
| ЭЛЕКТРОМОБИЛЬНЫЙ ВАРИАТОР | 1998 |
|
RU2175415C2 |
| ОБЪЕМНАЯ МАШИНА САВИНА | 1992 |
|
RU2016241C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВАРИАТОР | 2010 |
|
RU2457379C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| ИНЕРЦИОННАЯ МУФТА | 1992 |
|
RU2047017C1 |
| Редуктор для соосных винтов | 1949 |
|
SU87574A1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2279596C1 |
Изобретение относится к машиностроению. С-целью расширения эксплуатационных возможностей путем Обеспечения изменения величины передаваемого вращающего момента в инерционной, передаче инерционные грузы, выполненные в виде шестерен 16 и 17, обкатываются по промежуточным сателлитам 9 и 10 с возможностью самоторможения в зависимости от знака создаваемого грузами инерционного вращающего момента. Положительный инерционный момент передается через основные сателпиты 7 и центральное зубчатое колесо 13 на ведомый вал 3, а отрицательный инерционный момент при блокировке шестерен 17 и промежуточных сателлитов 10 передается через основные сателлиты 8 и центральное зубчатое колесо 14 на корпус 1, создавая на нем реактивный момент, Изменение величину передаваемого вращающего моменгг осуществляется перемещением поводкоь 22, при этом части 18 и 19 дополнительное центрального зубчатого колеса перемещаются по втулке 21 и поворачиваются относительно друг друга, что приводит к изменению расстояния общего центра масс комплекта грузов от осей 5 и 6. 2 ил. ел с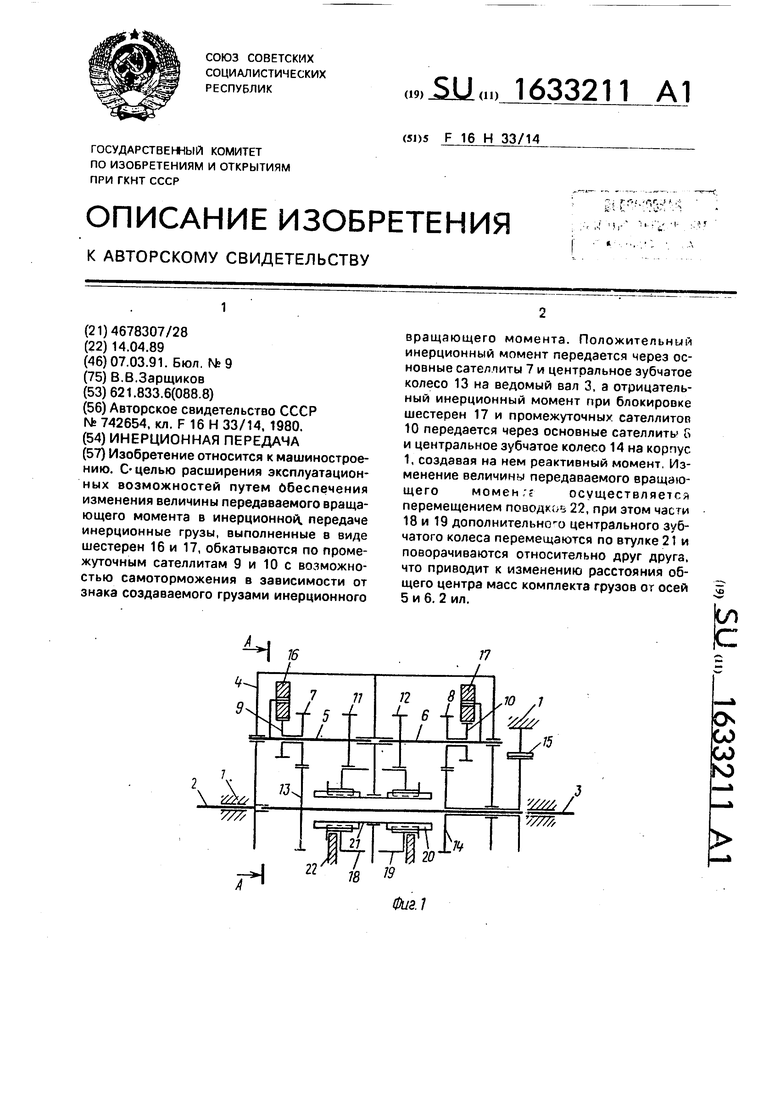
Фиг. 2
| Инерционная бесступенчатая передача | 1976 |
|
SU742654A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
